
MEASURING THE EFFECT OF POLICE
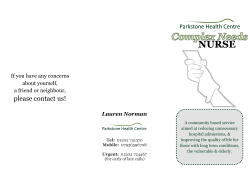
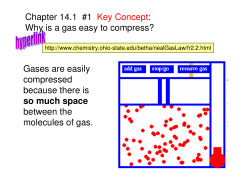
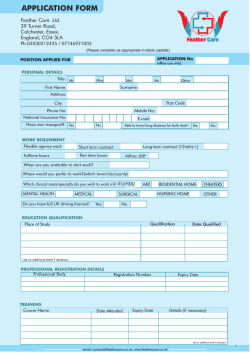
Acrid. Anal. & Pm-s. Vol. I I, pp. 261-270 @ Pergamon Prcrs Ltd.. 1979. Prmted m Great Br~latn MEASURING THE EFFECT OF POLICE SURVEILLANCE ON THE PREVENTION OF TRAFFIC ACCIDENTS AKIHIR~ Abe Laboratory, Department HASHIMOTO of Social Engineering, Tokyo Institute Meguro-ku, Tokyo, 152, Japan (Received 13 July 1978; in revised form of Technology, 25 April 2-12-l. 0-okayama, 1979) Abstract-An approach for estimating the effect of preventive measures taken against traffic accidents is presented. A simple stochastic model as to the process of accident occurrence is provided and the relationship among vulnerable behavior, collisions, and police surveillance is formalized. Here vulnerable behavior is defined as the state prior to the collision in the process of accident occurrence, and police surveillance is selected as one of the preventive measures against the accident. The procedures by which the model can be applied in practice are shown for the case of intersection accidents, and the effects of some intersection surveillance forms on accident prevention are calculated. The results suggest that police surveillance which affects vulnerable behavior reduces accidents and that each collision category differently has the most effective surveillance form. It is concluded that vulnerable behavior, which increases the likelihood of accident occurrence, provides a more sensitive safety measure than accidents. INTRODUCTION The prevention of traffic (automobile) accidents is as important as any other traffic safety measure. However, all preventive measures against the accident cannot be adopted. Therefore, alternative pereventive measures must be evaluated so that we can allocate the limited resources among them. Such being the case, an approach for measuring the effect of the police surveillance is presented in this paper, but it can be applied to the cases of other preventive measures against the accident, too. The automobile accident is a collision of a vehicle with another vehicle, with a pedestrian, or with a stationary object. Accidents are caused by a variety of failure modes affecting the informational and mechanical interactions linking together man, vehicle, and environment [Kontaratos, 19741. It has been suggested that human factors are involved in a causal way in more than 90% of accident cases [National Highway Traffic Safety Administration, 19721 or that most of accidents are caused by human error [McFarland and Mosely, 1954, National Safety Council, 19661. Therefore, collisions can be divided into two types: the collision caused primarily by driver failure and that caused primarily by pedestrian failure. Only the former were selected as the subject of this study, so that driver behavior is a key to the analysis of this kind of collision. As for the latter, pedestrian behavior, the approach in this paper can similarly be applied. MODEL Preventing collisions requires an understanding of the process of collision Therefore, we begin with the description of the process preceding the collision. generation. Process toward collision Goeller[ 19691 demonstrated conceptual framework for thz process of collision generation. Modifying the Goeller framework so that it is applicable to measuring the effect of the police surveillance, the process toward the collision is, in this study, drawn simply as Fig. 1. As soon as a vehicle starts on a road, the driver of the vehicle makes decisions (about 20 decisions per mile[Platt, 19591) and takes actions not to cause the collision based on his perceptions of traffic events (e.g. other vehicles, pedestrians, and signposts). However, the driver occasionally gets into danger for one of the following reasons: failing to perceive traffic events, making misjudgements, failing to operate the vehicle, or running a risk. Strictly speaking, it is not obvious whether any of these actions or failures is actually dangerous, they 261 A. HASHIMOTO 262 ( vehicle PHASE starts ) I 23 COLLISION Fig. 1. Process toward collision. should be called the potential dangers. Moreover, we define the driver behavior that causes such a potential danger to be vulnerable behavior (phase 1). Even though a driver’s behavior may be vulnerable, a collision does not always occur. For example, let us consider a driver at an intersection with automatic traffic signals. Suppose that the driver goes into the intersection in spite of the red traffic signal; then we say that his behavior is vulnerable because the state in which the driver and vehicle exist is potentially dangerous. However, if there are no other vehicles and no pedestrians in the intersection, the potential danger is not really dangerous and a collision does not occur. On the other hand, suppose that the potential danger is really dangerous (e.g. another vehicle comes from the other crossroad). Even in such a case, if the evasive action taken by a driver is successful, the collision does not occur. Otherwise, the collision occurs (phase 2). In this way, the process toward the collision can be considered as a stochastic chain in which chance plays a very large part. Vulnerable behavior, collision and police surveillance Vulnerable behavior is driver behavior that has the possibility of resulting in a collision. If all drivers refrain completely from vulnerable behavior, collision (caused by the driver) never occurs. Therefore, the vulnerable behavior is not a sufficient condition, but a necessary condition for the collision. On the other hand, the impact of police surveillance on the process leading up to a collision (Fig. 1) is as follows. Noticing the policemen, a driver generally intends to perform safe behavior (i.e. vulnerable behavior is reduced) in phase 1. However, the process in phase 2 is beyond the preventive effect of the police surveillance, because once the behavior becomes vulnerable, the transition to the collision or evasion depends on factors such as chance, quick judgement, and driving skill, which have nothing to do with the police surveillance. Thus, the police surveillance only reduces vulnerable behavior, but has an effect on the prevention of accidents that is similar to cutting off the stochastic chain toward the collision at the earliest point. Therefore, the effect of police surveillance on accident prevention can be measured by observing the reduction of vulnerable behavior if the relationship between the vulnerable behavior and the collision is established. Measuring the effect of police 263 surveillance In evaluating traffic safety measures, an indicator like the accident rate has been used. However, the value of such an indicator is too small to identify the efficiency of the measures on the small scale experiment. Since the vulnerable behavior occurs more frequently than collisions, it is much easier to observe vulnerable behavior. Therefore, the concept of vulnerable behavior is useful for the statistical analysis of accidents, Furthermore, the concept of vulnerable behavior is an external one to explain the collision occurrence by means of overt behavior that can be observed. Therefore, this analysis does not require treating the internal, (i.e. psycholigical or physical) factors of the driver, which are difficult to quantify. For example, considering the impact of alcohol on an accident, we do not say that a collision occurs due to the drunkenness, but that the collision occurs due to the vulnerable behavior that may be committed due to the drunkenness. Thus, the present analysis has nothing to do with the reason for the vulnerable behavior. Formalization Based on the foregoing concepts, the stochastic process toward the collision can be formalized as follows. Let Vi = act of vulnerable behavior, Cj = collision category. Since all the collisions caused by driver failure result from some vulnerable behavior (i.e. the vulnerable behavior is the necessary condition for the collision), we can consider the following conditional probability for every collision: p(ci/Vi) = the probability that collision category cj occurs due to the vulnerable behavior ui, given that the driver commits the vulnerable behavior Vi. Therefore, we can obtain the joint probability as follows. Let p(u;) = the probability that a driver commits the vulnerable behavior vi, p(ni Cj) = the probability that the collision category cj occurs due to the vulnerable behavior Vi, then p(U,, Cj) (i = 1, = p(Ui)p(Cj/Ui) . . . , n, j = i.. . . , m). The formalization for measuring the effect of the police surveillance is described as follows. Let k = index of police surveillance forms (k = 0, 1,. . . ,K). Here, k = 0 means no police surveillance (i.e. the normal state). Then, pk( Vi),Pk(cj/ui) and pk(ui, cj) denote the probabilities in the case where the police surveillance form k is executed, corresponding to p(s), P(cj/Vi) and p(q, cj). Police surveillance influences the probability that a driver’s behavior will be vulnerable, but does not influence the transition probability to a collision. Therefore, we can write PdCjlS) = Pk(Cj/U,)= P(Cj/U,) (i = 1,. . ., n, j = 1,. . ., m, k = 1,. . ., K). Here, we can obtain the probability that a collision of category Cj occurs vulnerable behavior item u, in the case where the surveillance form k is executed: Pkt”i9 Cj) = Pk(S)p(Cj/Vi) (i=l,..., n, j=l,..., m, k=O, I,..., due to the K). (1) Since PktCj) =,z Pk(Ut, Cj) (j=l,..., m, k=O, I ,..., K) is the probability that a collision of category cj occurs in the case where the surveillance is executed, we can measure the effect of the surveillance form k on the prevention collision category Cj by the following indicator: &(Cj) = 1 - [Pk(Cj)lPdCj)l (j = I,. . ., m, k = 1,. . ., K). form k of the (3) CASE STUDY In order to demonstrate the formalization described above, accident and police surveillance at intersections with automatic traffic signals (A.T.S.) were selected as the subject of the study. AAP Vol. II, No &R 264 A. HASHIMOTO Measurement of pk(ui) The vulnerable behaviors at the intersection were set up as shown in Table 1, referring to Road Traffic Law, discussions with the police, and the experiment carried out by Smeed[ 19641. (In the Smeed investigation, a list similar to Table 1 was provided and the effect of police presence on driver behavior at intersections was measured.) Since vulnerable behavior is behavior that has the possibility of resulting in a collision, as discussed before, these behaviors are not necessarily illegal. To produce Table 1, a preliminary analysis of intersection accidents was undertaken to make the vulnerable behaviors reliable and valid. That is, these vulnerable behaviors were adopted or rejected by the examination through the Traffic Accident Record of the police so that they would represent the primary determinants of intersection accident causation. It was suggested by the analysis that all the drivers that caused intersection accidents when driving at excessive speed had committed some vulnerable behavior in Table 1, e.g., failing to stop at red (u,) or failing to turn right correctly? ( zi4).Therefore, going too fast for the conditions generally identified as an important accident cause by past accident studies, does not appear as vulnerable behavior. The police surveillance forms at the intersection were set up as follows: form 0 = no police surveillance (i.e. the normal state), form 1 = the intersection is watched by a policeman at the cornet, form 2 = the intersection is watched by two policemen, one at the corner and another at the diagonal corner of the intersection, form 3 = the intersection is watched by a policeman on a stand placed in the center of the intersection, form 4 = the intersection is watched by a policeman at the corner, as the form 1, and at each of the two adjacent intersection corners respectively. Here, all the policemen mentioned above are wearing uniforms. These surveillance forms were set up in the following three surveillance series: formO-form formO-form formO-form 1-form2.....seriesA I-form3.....seriesB I-form4.....seriesC. Table I. Vulnerable behavior items at intersection vulnerable notation failing "1 to stop starting “2 ‘3 v4 v7 “8 to stop at amber to turn right drivers in ooposite when '10 direction to take evasive right* left two-wheeled vehicle riders evasive action turning left* causing pedestrians to take evasive offside when lane* or cyclists action to take even if on green failing signal passing over parking "12 from ** causing overtaking "11 turning correctly* turning proceeding “9 at red on red failing action “6 item failing causing “5 behavior intention stop line or changing or stopping when stopping lanes within near or at 5 meters intersection of approach to intersection * Note that this ** This item includes lane, tNote turning right is for traffic driving on the the following: turning in a row, and making a detour that this is for traffic driving on the left. left. right when from nearside turning right. Measuring the effect of policesurveillance 265 That is, series A is for identifying the effect of increased police surveillance; series B is for discriminating the effect of surveillance by a policeman located at a different part of the intersection; and series C is for identifying the durable effect of the police surveillance at adjacent intersections. A certain intersection that was a junction of four roads with four A.T.S. and four pedestrian crossings was selected. The frequency of each vulnerable behavior that occurred there in the case of each surveillance form was counted. (This experiment can be carried out relatively easily because the vulnerable behavior is the overt behavior.) Let Nik = the frequency of the vulnerable behavior O, in the case where the surveillance form k is executed, Qk = the number of vehicles passing through the intersection in the case where the surveillance form k is executed, then the probability of ui in the case of the form k is obtained as follows: Pk(Vi) = k = 0, 1,. . . ,4). 12, (i=l,..., Nik/Qk The results are shown in Table 2. Accident analysis The collision categories at the intersection were set up as shown in Table 3. In order to obtain the transition probability from the vulnerable behavior to the collision, 26 general intersections (i.e. junctions of four roads with four A.T.S. and four pedestrian crossings) were selected and the actual accidents caused there were examined through the Traffic Accident Record of the police. Classifying the collected cases of accidents according to the collision category and the vulnerable behavior item that is considered as the primal cause of the collision, the following matrix (Hii) is obtained; IIii = the number of the collision category ci caused by the vulnerable behavior item Di. Here, we should note that the vulnerable behavior of a third person not actually involved in the collision may be the primal cause of the collision. For example, suppose that one vehicle is Table 2. Probability of vulnerable vulnerable behavior v1 vz "3 v4 v5 v6 v7 v8 v9 v10 v11 v12 behavior u; in the case of surveillance form k* police surveillance form 0 1 2 3 4 0.69 0.53 0.26 0.25 0.42 0.24 0.13 0.13 0.07 0.06 1.37 1.33 0.98 0.88 1.18 0.57 0.53 0.44 0.20 0.37 0.64 0.53 0.21 0.24 0.43 0.08 0.07 0.06 0.08 0.07 0.05 0.01 0.01 0.05 0.00 0.45 0.15 1.16 0.53 0.33 0.57 0.52 0.32 0.11 0.37 2.54 2.36 2.34 2.90 1.80 0.13 0.13 0.05 0.04 0.03 0.01 0.03 0.00 0.01 0.01 * All values are multiplied by 100. Note: At the same intersection on 10 days with good weather, 3 hours (1:OO p.m.-2:30 p.m. and 3:00 p.m.-4:30 p.m.) per day, 2 days for each surveillance form, the number of vehicles passing Qk = 23804, 23633, 23731. 23391, 22628. This experiment was carried out at an intersection in the city of Yokohama. 266 HASHIMOTO A. Table 3. Collision categories at intersection notation collision head-on cl collision when collision c2 rear-end c3 flank c4 c5 '6 c7 * Note proceeding in parallel collision collision or side between collision vehicles when collision between vehicle and pedestrian collision between vehicle and stationary this is for category vehicle and another so that all the turning traffic includes vehicle collision right* I collision that ** This category only ** driving on the collisions coming straight categories left. between from object a turning the opposite are mutually right direction, exclusive. struck in the rear by the vehicle behind when the driver brings the first vehicle to a sudden stop in order to evade a third vehicle rushing out into the intersection in disregard of the red signal. In such a case, the primal cause of the rear-end collision (~3) is the vulnerable behavior, failing to stop at red (II,), committed by the driver of the third vehicle, and we count it as Hr3. The results of the accident analysis are shown in Table 4. Hence, the probability p(cj/ui) is calculated as follows: p(cjjvi) = Pd”iy(7)_ 4/Q PO(Vi) (i = 1,. . , 12, j = 1,. . . ,7), PO(Q) Table 4. Results of accident vulnerable collision behavior analysis* category total cl '2 '3 '4 '5 '6 1 1 25 51 3 13 94 5 5 1 11 27 12 4 20 65 8 11 29 7 v1 "2 v3 2 "4 3 6 36 v5 '6 1 23 '7 238 7 1 65 2 276 3 1 35 17 v7 17 26 v8 74 100 0 v9 v10 1 "11 8 191 11 16 * All the intersections 1970 to Jun. Note: sections cases 8 385 in the Metropolitan total Jan. collected number 1970 83 Police and 1973 274 accidents 122 that district 4 occurred in Tokyo 942 at the 26 from Jan. analyzed. of vehicles to Jun. 200 3 of human-injury 1973 were The from 58 1 71 "12 total 4 3 52 passing = Q = 2.536 through x 10'. the 26 inter- Measuring the effect of police surveillance 267 Table 5. Results of pk(c,) and Rk(c,) police collision category surveillance form 2 3 4 0 1 Cl 0.63 x10-8 0.60 x~O-~ C2 0.23 x~!I-~ 0.16 x~O-~ 0.11 x10-7 0.16 x1o-7 0.10 x10-7 C3 0.15 x1o-6 0.14 x10-6 0.10 x10-6 0.12 x1o-6 0.94 x10-7 C4 0.33 x10-7 0.27 x~O-~ (0.05) (0.30) (0.06) (0.18) C5 (0.57) (0.45) (0.51) (0.30) (0.21) (0.33) (0.54) (0.55) (0.38) 0.17 x10-7 0.14 x1o-7 0.21 x1o-7 (0.57) (0.49) (0.36) 0.11 x10-6 0.90 x1o-7 0.41‘x1o-7 0.41 x10-7 0.73 x1o-7 (0.17) '6 (0.62) (0.62) (0.33) 0.48 x~O-~ 0.30 x1o-7 0.21 x1o-7 0.25 x~O-~ 0.25 x~O-~ (0.37) C7 total: 0.35 x10-8 0.27 x~O-~ 0.29 x1o-8 (0.47) (0.57) (0.47) 0.16 x~O-~ 0.14 x1o-8 0.94 x1o-g 0.89 x10-' 0.11 x1o-g C 0.37 x10 -6 (0.13) (0.40) (0.44) (0.32) 0.31 x1o-6 0.20 x1o-6 0.22 x1o-6 ’ 0.23 x~O-~ (0.16) (0.47) (0.41) (0.39) here, Q = the total number of vehicles passing through the 26 intersections during the period of the accident analysis. Effect of police surveillance Based on the probabilities pk(ui) and p(cj/ri) obtained above, the probability pk(Vi, ci) is calculated through the eqn (1). The probability that the collision category cj occurs in the case where the surveillance form k is executed and the preventive effect of the form k on the collision category cj are also calculated through eqns (2) and (3). The results are shown in Table 5. RESULTS AND DISCUSSIONS In Table 5, what should be noted first is the probability of a collision at the intersection in the normal state: PO(C)= 0.37 X 10T6.This value means that collisions occur at a rate of only twice a month even at the intersection that has the largest volume of traffic among the 26 intersections selected for tbe accident analysis. Thus, in case we intend to measure the effect of some traffic safety measure at the intersection by such a probability (e.g. the accident rate), it is impossible to identify it through a one-day or a two-day observation at an intersection, However, as seen in Table 2, since the probability that the vulnerable behavior occurs is much larger than the probability of the collision occurrence, it can be measured on the small scale experiment. Then the effect of the traffic safety measure can be estimated indirectly using the probability of the vulnerable behavior. Thus, the approach using vulnerable behavior is valid for the statistical analysis of accidents. As seen in the parentheses in Table 5, the preventive effect of the police surveillance is measured for each surveillance form. These values, along each of the three surveillance series mentioned before, show a general tendency for surveillance forms 2, 3, and 4 to be more effective than the form 1. That is, both the effect of increased police surveillance, series A, and’ the durable effect of the police surveillance, series C, are recognized. Moreover, in series B, we find that the police surveillance in the center of the intersection is more effective for almost all collision categories than surveillance from the corner of the intersection. The effect of each surveillance form on the collision as a whole is displayed in graphical A. HASHIMOTO 268 100 r SURVEILLANCE Fig. 2. Preventive effect on the collision FORM as a whole. form in Fig. 2. Assuming that all of the true vulnerable behaviors had been identified, were free of measurement error, and that the regression of accidents on the behaviors to unity, we find here that even the surveillance form 1 can. prevent 16% of the caused in the normal state, that the form 2 can prevent about a half of those, and so However, what is interesting is that the police surveillance affects each collision differently. Therefore, the seven collision categories can be divided into three groups to the most effective surveillance form. that they was close collisions on. category according (1) [CS, ~1: Form 2 is the most efectiue The collision between vehicle and pedestrian (cg) is generally caused at the pedestrian crossing when the vehicle goes into or goes out of the intersection. Therefore, it is convincing that the form 2 is most effective for this collision category because the policemen in this form are located near the pedestrian crossing. But what we should note here is that this category is the one for which form 1 is most effective for preventing collisions among the seven categories. Therefore, we can say that this category is most sensitive to the police surveillance (see Fig. 3.1). (2) [cI,c4,c5,c7]: Form 3 is the most efective Here we recognize the greatest effect of the police surveillance on a collision category. That is, 60% of the collisions when turning rightt (cS) can be prevented by either form 3 or form 2. Therefore, we can say that this category is most reducible using police surveillance. Many accident analyses of the past indicate that the collision categories in this group are mainly due to reckless driving or running a risk. Hence, form 3 seems to have the greatest effect on risk-taking drivers by causing them to drive more carefully than they usually do, at least at the intersection where the police are present (see Fig. 3.2). (3) [c2,cJ: Form 4 is the most efective The rear-end collision (cJ), which occurs most frequently (i.e. forms about 40% of all the collisions at the intersection as seen in Table 4), is the category that is least influenced by police surveillance. Therefore, we can say that this category is least sensitive to police surveillance. Moreover, it can also be said from past analyses that collision categories in this group mainly occur due to the carelessness of drivers. Hence, we find that police surveillance at the previous intersection has the effect of making the driver more alert, and it is durable at least at the next intersection (see Fig. 3.3). Bee previous footnote. 269 Measuring the effect of police surveillance 3.1 3.2 COLLISION VEHICLE BETWEEN AND 3.3 COLLISION PEDESTRIAN TURNING Cc,) this COLLISION RIGHT* Cc,) Cc,) SURVEILLANCE * liote that REAR-END WHEN is for traffic driving on the FORM left. Fig. 3. Preventive effect on some collision categories. In this way, the police surveillance at the intersection seems to have two kinds of effects on the driver. One is that it makes the driver behave better and another is that it makes the driver more alert. The former is temporary and the latter is durable. Therefore, the effect of surveillance form 3 and that of form 4 on each collision category are in contrast to each other. Moreover, form 2 has an even effect on every collision category (see Figs. 2 and 3). Proving the results of this study actually requires a long-term study of accident rates at locations with specific surveillance being carried out continuously. However, this is impracticable because accidents occur so infrequently that continuous surveillance is costly. For that reason, conversely, the theory and methodology presented in this paper were developed. Therefore, what would be needed would be identifying the true vulnerable behaviors that are consistent with the theory by the analysis of many more past accident cases. Then the procedures presented in this study would be more valid to evaluate measures to improve traffic safety, i.e. to improve our ability to determine the benefits of various traffic safety programs related to accident avoidance. CONCLUSIONS The procedures for measuring the preyentive effect of the police surveillance on accidents at intersections have been developed using the notion of the vulnerable behavior. The adoption of the vulnerable behavior concept makes the quantitative analysis of accidents relatively easy because vulnerable behavior occurs much more frequently than accidents and because it is the overt behavior that we can observe externally. Moreover, the notion of vulnerable behavior can be applied to collisions caused by pedestrians’ vulnerable behavior and can also be applied to collisions on the road as well as at intersections. Therefore,,the procedures developed in this study are useful for measuring the effect of various types of preventive measures taken against traffic accidents. Acknowledgments-This I would study was conducted under the leadership of Assistant Professor Kodama of Saitama University. to express my gratitude to Professor Kodama. 1 also wish to acknowledge the like to take this opportunity perceptive comments of the referees. REFERENCES Goeller B. F.. Modeling the traffic-safety system. Accid. Anal. Preu. 1, 167, 1%9. Kontaratos A. N., A systems analysis of the problem of road casualties in the United 1974. States. Accid. Anal. Preu. 6, 223, A. HASHIMOTO 270 McFarland R. and Mosely A. L., Human Factors in Highway Transportation Safety. Harvard School of Public Health, Cambridge, Mass., 1954. National Highway Traffic Safety Administration, A Study to Determine the Relationship Between Vehicle Defects and Crushes. Vol. I. Report No. DOT-HS-0342-263-VDP-72-1, USDcpartment of Transportation, 1972. National Safety Council, Accident Facts. Chicago, 1966. Platt F., Operations analysis of traffic safety. Int. Rood Safety and Trufic Rev., 1959. Smeed R. J., Methods available to reduce the numbers of road casualties. Proc. 7th Int. Study Week in Traffic Engineering, 1964.





© Copyright 2025