
Mini8 ENG oller Eight loop contr
Eight loop controller Mini8 Engineering Handbook ENG E U ROT H E R M Mini8 Controller Engineering Handbook Mini8 – Multi-Loop Process Controller 1. CHAPTER 1 INSTALLATION AND OPERATION 1.1 1.2 1.3 1.3.1 1.3.2 1.3.3 1.4 1.4.1 1.4.2 1.4.3 1.4.4 1.4.5 1.4.6 1.4.7 1.4.8 1.4.9 1.4.10 1.4.11 1.4.12 1.4.13 1.4.14 1.4.15 1.4.16 1.5 1.6 2. What Instrument Do I Have? Mini8 Ordering Code How to Install the Controller Dimensions To Install the Controller Environmental Requirements Electrical Connections Power Supply Fixed IO Connections Digital Communications Connections Configuration Port Modbus DeviceNet / CANopen Typical DeviceNet / CANopen Wiring Diagram Profibus DP Ethernet (Modbus TCP) Thermocouple Input TC4 and TC8 RTD / PT100 Input RT4 Logic Input DI8 Logic Output DO8 Relay Output RL8 Analogue Output AO4 and AO8 Current Transformer input Module CT3 Adding or replacing an IO module. Mini 8 LED Indicators CHAPTER 2 USING THE MINI8 2.1 2.1.1 2.2 2.3 2.4 2.5 2.6 2.7 2.7.1 2.7.2 2.8 2.8.1 2.9 2.9.1 2.9.2 2.9.3 3. iTools iTools OPC Open server Modbus, single register, SCADA addressing Modbus (Floating Point) Fieldbus Ethernet Mini8 Execution The iTools Operator Interface Scanning Browsing and Changing Parameter Values Recipe Editor Recipe Menu Commands OPCScope OPC Scope List Window Context Menu OPC Scope Chart Window OPC Server CHAPTER 3 CONFIGURATION USING ITOOLS 3.1 3.1.1 3.2 3.2.1 3.2.2 3.3 3.4 3.4.1 3.4.2 Configuration On-Line/Off-line Configuration Connecting a PC to the Mini8 Controller Configuration Cable and Clip Scanning Cloning Configuring the Mini8 Function Blocks Soft Wiring Part No HA028581 Issue 3 Sep-05 8 8 9 10 10 10 10 11 11 12 12 12 12 14 15 16 17 18 19 20 21 22 23 24 25 26 27 27 27 27 28 28 28 28 29 29 29 31 31 32 33 33 35 36 36 36 36 36 36 37 38 38 39 1 Engineering Handbook Mini8 Controller 3.5 Simple Worked Example 3.5.1 The I/O 3.5.2 Wiring 3.6 Graphical Wiring Editor 3.6.1 Graphical Wiring Toolbar 3.6.2 Function Block 3.6.3 Wire 3.6.4 Block Execution Order 3.6.5 Using Function Blocks 3.6.6 Tooltips 3.6.7 Function Block State 3.6.8 Using Wires 3.6.9 Using Comments 3.6.10 Using Monitors 3.6.11 Downloading 3.6.12 Selections 3.6.13 Colours 3.6.14 Diagram Context Menu 3.6.15 Wiring Floats with Status Information 3.6.16 Edge Wires 4. 40 40 42 45 46 46 46 46 46 47 48 49 50 51 51 51 52 52 53 54 CHAPTER 4 MINI8 OVERVIEW 4.1 55 Complete list of Function Blocks. 56 5. CHAPTER 5 ACCESS FOLDER 57 6. CHAPTER 6 INSTRUMENT FOLDER 58 6.1 6.2 6.3 6.4 7. 58 59 59 60 CHAPTER 7 I/O FOLDER 7.1 7.1.1 7.2 7.2.1 7.3 7.3.1 7.3.2 7.3.3 7.4 7.4.1 7.5 7.5.1 7.5.2 7.5.3 7.5.4 7.5.5 7.5.6 7.5.7 7.5.8 7.6 7.6.1 7.6.2 7.6.3 7.7 7.7.1 2 Instrument / Enables Instrument Options Instrument / InstInfo Instrument / Diagnostics 62 Module ID Modules Logic Input Logic Input Parameters Logic Output Logic Out Parameters Logic Output Scaling Example: To Scale a Proportioning Logic Output Relay Output Relay Parameters Thermocouple Input Thermocouple Input Parameters Linearisation Types and Ranges CJC Type Sensor Break Value Fallback User Calibration (Two Point) PV Offset (Single Point) Using TC4 or TC8 channel as a mV input Resistance Thermometer Input RT Input Parameters Linearisation Types and Ranges Using RT4 as mA input Analogue Output Example – 4 to 20mA Analogue Output 62 62 63 63 64 64 64 65 66 66 67 67 69 69 70 70 71 71 72 73 73 74 74 75 75 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 7.8 Fixed IO 7.9 Current Monitor 7.9.2 Single Phase Configurations 7.9.3 Three Phase Configuration 7.9.4 Parameter Configuration 7.9.5 Commissioning 7.9.6 Calibration 8. CHAPTER 8 ALARMS 8.1 8.2 8.2.1 8.3 8.3.1 8.4 8.4.1 8.4.2 8.5 8.5.1 8.6 8.6.1 8.7 8.8 9. Further Alarm Definitions Analogue Alarms Analogue Alarm Types Digital Alarms Digital Alarm Types Alarm Outputs How Alarms are Indicated To Acknowledge an Alarm Alarm Parameters Example: To Configure Alarm 1 Digital Alarm Parameters Example: To Configure DigAlarm 1 Alarm Summary Alarm Log 76 77 78 80 81 82 84 85 85 86 86 87 87 87 87 87 87 89 90 90 91 93 CHAPTER 9 BCD INPUT 94 9.1 BCD Parameters 9.1.1 Example: To wire a BCD Input 94 95 10. CHAPTER 10 DIGITAL COMMUNICATIONS 10.1 10.1.1 10.2 10.3 10.3.1 10.3.2 10.3.3 10.3.4 10.3.5 10.3.6 10.3.7 10.4 10.4.1 10.4.2 10.5 10.6 10.6.1 10.6.2 10.6.3 10.6.4 10.6.5 10.6.6 10.6.7 10.6.8 10.6.9 10.6.10 10.6.11 10.7 10.8 Configuration Port Configuration Communications Parameters Field Communications Port Modbus Modbus Connections Communications Parameters Communications Identity Modbus Address Switch Baud Rate Parity RX/TX Delay Time Modbus Broadcast Master Communications Mini8 Broadcast Master Wiring Connections DeviceNet CANopen Instrument setup Mini8 CANopen Features Communication Interface Network Management (NMT) Device Profile DS-404 Default PDOs Enabling and Disabling PDO Communications Changing PDO Mapping Remapping over the network Enabling & Disabling PDO Change of State transmission. General Communication Objects Profibus Ethernet Part No HA028581 Issue 3 Sep-05 96 96 96 97 97 97 98 98 99 99 99 99 100 100 101 102 103 103 103 104 105 106 106 109 109 112 114 114 119 120 3 Engineering Handbook 10.8.1 10.8.2 10.8.3 10.8.4 10.8.5 11. 11.1 11.1.1 11.2 11.2.1 11.2.2 11.2.3 11.2.4 11.2.5 11.2.6 11.3 11.3.1 11.4 11.4.1 12. 12.1 12.1.1 12.1.2 12.1.3 12.1.4 12.2 12.2.1 12.2.2 12.2.3 12.2.4 12.2.5 12.2.6 12.2.7 12.2.8 13. 13.1 13.1.1 13.1.2 13.1.3 13.2 14. 14.1 14.1.1 14.1.2 14.1.3 14.2 14.3 14.3.1 14.3.2 14.3.3 14.4 14.4.1 14.4.2 14.4.3 4 Mini8 Controller Instrument setup Unit Identity Dynamic Host Configuration Protocol (DHCP) Settings iTools Setup Ethernet Parameters 120 120 120 121 122 CH. 11 COUNTERS, TIMERS, TOTALISERS, RT CLOCK 124 Counters Counter Parameters Timers Timer Types On Pulse Timer Mode On Delay Timer Mode One Shot Timer Mode Minimum On Timer or Compressor Mode Timer Parameters Totalisers Totaliser Parameters Real Time Clock Real Time Clock Parameters 124 125 126 126 126 127 128 129 130 131 132 133 133 CHAPTER 12 APPLICATIONS 134 Humidity Overview Temperature Control of an Environmental Chamber Humidity Control of an Environmental Chamber Humidity Parameters Zirconia (Carbon Potential) Control Temperature Control Carbon Potential Control Sooting Alarm Automatic Probe Cleaning Endothermic Gas Correction Clean Probe Probe Status Zirconia Parameters 134 134 134 134 135 135 135 136 136 136 136 136 136 137 CHAPTER 13 INPUT MONITOR 139 Description Maximum Detect Minimum Detect Time Above Threshold Input Monitor Parameters 139 139 139 139 140 CHAPTER 14 LOGIC AND MATHS OPERATORS. 141 Logic Operators Logic 8 2 input Logic Operations Logic Operator Parameters Eight Input Logic Operators Maths Operators Math Operations Math Operator Parameters Sample and Hold Operation Multiple Input Operator Block Cascaded operation Fallback Strategy Multiple Input Operator Block Parameters 141 141 142 143 144 145 146 147 148 149 150 150 151 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 14.5 14.5.1 14.5.2 15. Eight Input Analog Multiplexers Multiple Input Operator Parameters Fallback CHAPTER 15 INPUT CHARACTERISATION 15.1 15.1.1 15.1.2 15.2 16. Input Linearisation Compensation for Sensor Non-Linearities Input Linearisation Parameters Polynomial CHAPTER 16 LOAD 16.1 17. Load Parameters CHAPTER 17 CONTROL LOOP SET UP 17.1 17.2 17.3 17.3.1 17.4 17.4.1 17.4.2 17.4.3 17.4.4 17.4.5 17.4.6 17.4.7 17.4.8 17.4.9 17.4.10 17.5 17.5.1 17.5.2 17.5.3 17.5.4 17.5.5 17.5.6 17.5.7 17.6 17.6.1 17.6.2 17.6.3 17.6.4 17.6.5 17.7 17.7.1 18. 18.1.1 18.1.2 18.2 18.3 18.3.1 18.3.2 18.3.3 18.3.4 18.3.5 18.3.6 18.3.7 Engineering Handbook What is a Control Loop? Loop Parameters - Main Loop Set up Types of Control Loop PID Control Proportional Term Integral Term Derivative Term High and Low Cutback Integral action and manual reset Relative Cool Gain Loop Break Time Cooling Algorithm Gain Scheduling PID Parameters Tuning Automatic Tuning One-shot Tuning Calculation of the cutback values Manual Tuning Setting the Cutback Values Multi-zone applications. Tune Parameters Setpoint Function Block Setpoint Function Block SP Tracking Manual Tracking Rate Limit Setpoint Parameters Output Function Block Effect of Control Action, Hysteresis and Deadband SETPOINT PROGRAMMER Time to Target Programmer Ramp Rate Programmer Mini8 Programmer Block(s) Segment Types Rate Dwell Step Time GoBack Wait End Part No HA028581 Issue 3 Sep-05 152 152 152 153 153 154 155 156 158 158 160 160 161 161 162 162 163 163 163 164 164 164 164 164 165 166 167 167 167 167 168 168 169 169 170 170 171 171 171 171 173 175 176 176 177 177 178 178 178 178 178 178 179 179 5 Engineering Handbook 18.4 18.4.1 18.4.2 18.4.3 18.5 18.5.1 18.6 18.7 18.7.1 18.8 18.9 18.9.1 18.9.2 18.9.3 18.9.4 18.9.5 18.9.6 18.10 18.11 18.12 18.13 18.14 18.14.1 18.14.2 18.14.3 18.14.4 18.15 19. 19.1.1 19.1.2 20. 20.1 20.2 20.3 20.4 20.4.1 20.4.2 20.4.3 20.4.4 21. 21.1 22. 22.1 22.1.1 22.1.2 22.1.3 22.1.4 22.1.5 22.2 22.3 22.3.1 22.3.2 22.4 22.5 6 Mini8 Controller Output Events Digital Events PV Event & User Value Time Event Holdback Guaranteed Soak PID Select Program Cycles Servo Power Fail Recovery To Run, Hold or Reset a Program Run Reset Hold Skip segment Advance segment Fast PV Start Configuring the Programmer Programmer Run Status Creating a Program Program Editor Analog View Digital View Saving & Loading Programs Printing a Program Wiring the Programmer Function Block. 180 180 181 181 184 184 185 185 185 186 187 187 187 187 187 188 188 188 189 191 192 192 193 195 195 196 197 CHAPTER 19 SWITCH OVER 199 Example: To Set the Switch Over Levels Switch Over Parameters 199 200 CHAPTER 20 TRANSDUCER SCALING 201 Auto-Tare Calibration Load Cell Comparison Calibration Transducer Scaling Parameters Parameter Notes Tare Calibration Load Cell Comparison Calibration 201 202 202 202 204 204 205 205 CHAPTER 21 USER VALUES 206 User Value Parameters 206 CHAPTER 22 CALIBRATION 207 TC4 / TC8 User calibration Set Up Zero Calibration Voltage Calibration CJC Calibration Sensor-Break Limit Check To Return to TC4/TC8 Factory Calibration RT4 User calibration Set Up Calibration To Return to RT4 Factory Calibration Calibration Parameters 207 207 207 207 207 207 208 208 208 208 208 209 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 23. 23.1 23.2 23.2.1 23.2.2 24. 24.1 24.2 24.2.1 25. 25.1 26. 26.1 26.1.1 26.1.2 26.1.3 26.1.4 26.2 Engineering Handbook APPENDIX A MODBUS SCADA TABLE 210 Comms Table SCADA Table Version 2.xx Programmer Addresses - Decimal Version 2.xx Programmer Addresses - Hexadecimal 210 210 237 244 APPENDIX B DEVICENET PARAMETER TABLES IO Re-Mapping Object Application Variables Object Table Modification APPENDIX C CANOPEN PARAMETER TABLES Manufacturer Object – Pick List 251 251 252 256 257 257 APPENDIX D VERSION 1.XX PROGRAMMER 261 Version 1.xx Parameter Tables Configuring the Programmer (V1.xx) To Select, Run, Hold or Reset a Program (V1.xx). Creating a Program (V1.xx) To Select, Run, Hold or Reset a Program (Version 1.xx) Version 1.xx Programmer SCADA addresses 261 261 262 262 263 263 27. APPENDIX E SAFETY AND EMC INFORMATION 268 28. APPENDIX F TECHNICAL SPECIFICATION 271 28.1 28.2 28.3 28.4 28.5 28.6 28.7 28.8 28.9 28.10 28.11 28.12 28.13 28.14 28.15 28.16 28.17 Environmental Specification Network Communications Support Configuration Communications Support Fixed I/O Resources TC8 8-Channel and TC4 4-Channel TC Input Card DO8 8-Channel Digital Output Card RL8 8-Channel Relay Output Card CT3 3-Channel Current-Transformer Input Card Load Failure Detection DI8 8-Channel Digital Input Card RT4 Resistance Thermometer Input Card AO8 8-Channel and AO4 4-Channel 4-20mA Output Card Toolkit Blocks PID Control Loop Blocks Process Alarms Setpoint Programmer Recipes 271 271 271 272 272 273 273 273 274 274 274 275 276 277 277 277 277 Issue Status of This Manual Issue 3 of this manual applies to software version 2.xx. Part No HA028581 Issue 3 Sep-05 7 Engineering Handbook Mini8 Controller Mini8 Multi-Loop Process Controller 1. CHAPTER 1 INSTALLATION AND OPERATION 1.1 What Instrument Do I Have? Thank you for choosing this Mini 8 Controller. The Mini8 is a compact DIN rail mounting multi-loop PID controller and data acquisition unit. It offers a choice of I/O and a choice of field communications. The Mini8 mounts on 35mm Top Hat DIN Rail. It is intended for permanent installation, for indoor use only, and to be enclosed in an electrical panel or cabinet. The Mini8 is pre-assembled in the factory to give the I/O required for the application as specified in the order code. With standard applications the Mini8 is also supplied configured. Alternatively the Mini8 is configured using Eurotherm’s iTools configuration suite running on a personal computer. All Safety & EMC information is in Appendix E. The full Technical Specification is in Appendix F. Whenever the symbol 8 ☺ appears in this handbook it indicates a helpful hint Part No HA028581 Issue 3 Sep-05 Mini8 Controller 1.2 Engineering Handbook Mini8 Ordering Code 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Mini8 Loops Programs PSU Comms Units I/O Slot1 I/O Slot2 I/O Slot3 I/O Slot4 11 12 . 13. 14. 15. Application Recipe Wires Manual Config 1 MINI8 7-10 IO Slots 1-4 Mini 8 controller XXX No module fitted Control Loops TC4 4 Channel TC Input ACQ IO Acquisition only TC8 8 Channel TC Input 4LP 4 Control loops RT4 4 Channel RTD input 8LP 8 Control loops AO4 16LP 16 Control loops 4 Channel 4-20mA output (slot 4 only) AO8 8 Channel 4-20mA output (slot 4 only) 2 3 Programs 0PRG No Programs 1PRG 1 Profile – 50 programs DO8 8 Channel logic output XPRG Multi-profile – 50 programs CT3 3 Channel CT input 4 PSU RL8 8 Channel relay (slots 2, 3 only) VL 24Vdc DI8 8 Channel logic input VH 100 – 264 Vac 5 Communications 11 STD Application MODBUS Non Isolated Modbus RTU slave No configuration ISOLMBUS Isolated Modbus RTU slave EC8 8 Loop Extrusion Controller DEVICENET DeviceNet Slave FC8 8 Loop 4-20mA outputs PBUSRJ45 Profibus Slave RJ45 12 Wires PBUS9PIN Profibus Slave 9 pin D type 30 30 User Wires ENETMBUS Ethernet Modbus TCP IP Slave 60 60 User Wires CANOPEN CANopen Slave 120 120 User Wires 6 Temperature Units C Centigrade F Fahrenheit 250 250 User Wires 13 Recipes None RCP 14 Manual ENG English GER German FRA French SPA Spanish ITA Italian 15 Part No HA028581 Issue 3 Sep-05 No Recipes 8 Recipes Configuration Software NONE No CD ITOOLS Itools CD & Mini8 documentation 9 Engineering Handbook 1.3 Mini8 Controller How to Install the Controller This instrument is intended for permanent installation, for indoor use only, and to be enclosed in an electrical panel. Select a location where minimum vibrations are present and the ambient temperature is within 0 and 50oC (32 and 122oF). Please read the safety information, Appendix E at the end of this guide, before proceeding and refer to the EMC Booklet part number HA025497 for further information. 1.3.1 Dimensions Allow a minimum of 25mm above and below each unit Allow a minimum of 25mm for terminals and cables A C B Dimension A B C mm 108 124 115 Figure 1-1: Mini8 Dimensions 1.3.2 To Install the Controller 1. 2. 3. 4. 5. 6. 1.3.3 Use 35mm symmetrical DIN Rail to EN50022-35 x 7.5 or 35 x 15, Mount the DIN Rail horizontally as indicated in Figure 1.1. The Mini8 is NOT designed to be mounted in other orientations. Hook the upper edge of the DIN rail clip on the instrument on the top of the DIN rail and push. To remove use a screwdriver to lever down the lower DIN rail clip and lift forward when the clip has released. A second unit on the same DIN rail may be mounted adjacent to the unit. A second unit mounted above or below the unit requires a gap of at least 25mm between the top of the lower one and the bottom of the higher one. Environmental Requirements Mini8 Temperature Humidity (non condensing) Altitude 10 Minimum 0°C 5% RH Maximum 55°C 95% RH 2000m Part No HA028581 Issue 3 Sep-05 Mini8 Controller 1.4 Engineering Handbook Electrical Connections The Mini8 is intended for operation at safe low voltage levels, except the RL8 relay module. Voltages in excess of 42 volts must not be applied to any terminals other than the RL8 relay module. A protective earth connection is required. Do not replace the battery. Return to factory if replacement battery is required. Communications LEDs Communications Configuration port Instrument LEDs Power Supply Fixed IO I/O Slots I to 4 Communications connector DeviceNet shown Communications settings Figure 1-2: Terminal Layout for Mini8 Controller 1.4.1 Power Supply The power supply requires a supply between 17.8 to 28.8 V dc, 15 watts maximum User-Terminals 24V Ø 24 V dc 24V Ø 24 V dc 0V Ø 0 V dc GND Ø Ground Connector terminals will accept wire sizes from 0.5 to 2.5, 24 to 12 awg. Note: If the Min8 is used with the VT505 panel ensure that the power supply connectors cannot be mistakenly changed over. The connectors are physically the same, but the electrical connections are not compatible. Plugging the VT505 connector into the Mini8 will short-circuit the 24 volt supply. Part No HA028581 Issue 3 Sep-05 11 Engineering Handbook 1.4.2 Mini8 Controller Fixed IO Connections These I/O are part of the power supply board and are always fitted. D1 Ø Digital Input 1 D2 Ø Digital Input 2 C Ø Digital Input common A1 Ø Relay A n/open A2 Ø Relay A n/closed A3 Ø Relay A common B1 Ø Relay B n/open B2 Ø Relay B n/closed B3 Ø Relay B common Digital Inputs : ON requires > 10.8V with 2mA drive, 30V max. Relays contacts: 1 amp max, 42Vdc. These contacts are NOT rated for mains operation. 1.4.3 Digital Communications Connections Two communications connections are fitted – a Modbus Configuration port (RJ11) and a Fieldbus port. The Fieldbus is either Modbus (2 x RJ45 ), DeviceNet, CANopen, Profibus or Ethernet 10baseT. 1.4.4 Configuration Port The configuration port (Modbus) is on an RJ11 socket, just to the right of the power supply connections. It is a point to point RS232 connection. Eurotherm supply a standard cable to connect a serial COM port on a computer to the RJ11 socket, part no. SubMin8/cable/config. 9 pin DF to PC COM port (RS232) 1.4.5 RJ11 Function Pin - 6 N/c 3 (Tx) 5 Rx 2 (Rx) 4 Tx 5 (0v) 3 0v (gnd) 2 N/c 1 Reserved Pin 6 Pin 1 Modbus For a full description of the installation of a communications link, including line matching resistors, see Eurotherm 2000 series communications handbook, part no. HA026230. RJ45 pin 3 wire 5 wire 8 A RxA 7 B RxB 6 Ground Ground 3 Ground Ground 2 A TxA 1 B TxB Pin 8 5 4 12 Pin 1 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Two RJ45 sockets are provided – one for the incoming connection, the second to loop onto the next instrument or for a line terminator. For the address switch see Chapter 10.3.4 The RS485 standard allows one or more instruments to be connected (multi dropped) using a two wire connection, with cable length of less than 1200m. 31 instruments and one master may be connected. To use RS485, buffer the RS232 port of the PC with a suitable RS232/RS485 converter. The Eurotherm Controls KD485 Communications Adapter unit is recommended for this purpose. The use of a RS485 board built into the computer is not recommended since this board may not be isolated, which may cause noise problems or damage to the computer, and the RX terminals may not be biased correctly for this application. Either cut a patch cable and connect the open end to the KD485 converter or, using twin screened cable, crimp an RJ45 plug on the Mini8 end. The communication line must be daisy chained from device to device and, if the communications line is more than a metre or two long, it must be correctly terminated. A Modbus terminator containing the correct termination resistors is available from Eurotherm, order code: SubMin8/RESISTOR/MODBUS/RJ45. The Modbus terminator is BLACK. See also the 2000 series Communications Handbook, part number HA026230, available on www.eurotherm.co.uk. for further information on digital communications. RS232 Com Rx Tx RxA RxB Com TxA TxB RS485 220 ohm termination resistor on the Rx of the converter unit RJ45 Patch cables Modbus Terminator Type KD485 converter Mini8 no. 1 Mini8 no. n Figure 1-3: RS485 two-wire Connections For the 4 wire connection the TxA and TxB are not connected to RxA and RxB but connected separately through another twisted pair. Part No HA028581 Issue 3 Sep-05 13 Engineering Handbook 1.4.6 Mini8 Controller DeviceNet / CANopen DeviceNet and CANopen both use a 5 way, 5.08mm pitch, connector/screw terminal, The DeviceNet bus is powered (24V) from the system network, not from the instrument. The Mini8 requirement is a load of around 100mA. For the address switch see Chapter 10.5 Legend Mini8 Label Colour V+ Red Function V+ V+ CH CAN HIGH DR DRAIN CL CAN LOW V- V- Description Network power positive terminal. Connect the red wire of the DeviceNet / CANopen cable here. If the network does not supply the power, connect the positive terminal of an external 11-25 Vdc power supply. CAN_H White CAN_H data bus terminal. Connect the white wire of the DeviceNet / CANopen cable here. SHIELD None Shield/Drain wire connection. Connect the DeviceNet cable shield here. To prevent ground loops, the network should be grounded in only one location. CAN_L Blue CAN_L data bus terminal. Connect the blue wire of the DeviceNet / CANopen cable here. VBlack Network power negative terminal. Connect the black wire of the DeviceNet / CANopen cable here. If the DeviceNet network does not supply the power, connect the negative terminal of an external 11-25 Vdc power supply. The DeviceNet specification states that the bus terminators of 121 ohm should not be included as any part of a master or slave. They are not supplied but should be included in the cabling between CAN_H and CAN_L where required. The CANopen Cabling and Connector Pin Assignment specification specifies that the minimum termination resistance is 118 ohm with the following guidelines. They are not supplied but should be included in the cabling where required. Bus length (m) Termination resistance (ohms) 0 – 40 124 40 – 100 150 - 300 Network length depends on Baud rate. 14 Network Length Varies w/speed, up to 4000m possible w/repeaters Baud Rate 125 250 500 1M (CANopen) Thin trunk 100m (328ft) 100m (328ft) 100m (328ft) 100m Max drop 6m (20ft) 6m (20ft) 6m (20ft) 6m(20ft) Cumulative drop 156m (512ft) 78m (256ft) 39m (128ft) 19m (64ft) Part No HA028581 Issue 3 Sep-05 Mini8 Controller 1.4.7 Engineering Handbook Typical DeviceNet / CANopen Wiring Diagram Mini8 V+ 5 CAN-H 4 Drain 3 CAN-L 2 V- 1 RED V+ CAN-H Drain CAN-L V- WHT BLU BLK (SLAVE) Address 11 MASTER Mini8 V+ CAN-H Drain CAN-L VSupply 24Vdc (+/- 1%) 250mV p-p Ripple (SLAVE) V+ VGnd Address 12 max Mini8 V+ CAN-H Drain CAN-L V- 121 Ω* (SLAVE) Address N+1 * CANopen specifies 124 ohms, see previous section. See the DeviceNet Communications Handbook HA027506 Part No HA028581 Issue 3 Sep-05 15 Engineering Handbook 1.4.8 Mini8 Controller Profibus DP Two Profibus communications board options are available for the Mini8. 1. Standard Profibus 3 wire RS485 9 pin D connector intended for installation using standard Profibus cabling. Note that in this arrangement line terminations must be catered for in the cabling. 2. Profibus 3 wire RS485 via 2 paralleled RJ45 sockets. Instruments may be daisy chained using suitable RJ45 cables and an RJ45 termination plug is available to terminate the line. 1.4.8.1 Profibus Interface (D-Type Connector) Connector: 9-Way D-Type, R/A, Female, 4-40 UNC Studs: 1.4.8.2 Pin Function 1 Shield (Case) 2 N/C 3 RxD/TxD+ P (B) 4 N/C 5 GND (0V) 6 VP (+5V) 7 N/C 8 RxD/TxD- N (A) 9 N/C Terminations must be included in the cabling. Profibus Interface (RJ45 Connector) Connector: Two RJ45, parallel connected (for daisy-chain): Pin 3-Wire 8 (do not use) 7 (do not use) 6 VP (+5V) 5 1 4 16 8 3 GND 2 RxD/TxD+ P (B) One connector may be used to terminate line using SubMini8/Term/Profibus/RJ45 1 RxD/TxD- N (A) This terminator is grey. Part No HA028581 Issue 3 Sep-05 Mini8 Controller 1.4.9 Engineering Handbook Ethernet (Modbus TCP) The Ethernet connection uses standard Cat5E patch cables (RJ45). These would be used with a 10BaseT hub to create a network. A crossover patch cable may be used ‘point-to-point’ i.e. to connect a single instrument directly to a PC. Connector: RJ45: Pin Function 8 7 6 8 RX- 5 4 3 RX+ 2 TX- 1 TX+ 1 Network traffic activity is displayed on indicators built into the connector, yellow indicates network activity and green shows the Mini8 is communicating. Part No HA028581 Issue 3 Sep-05 17 Engineering Handbook Mini8 Controller 1.4.10 Thermocouple Input TC4 and TC8 The TC8 thermocouple module takes 8 thermocouples; the TC4 module takes 4 thermocouples. They may be placed in any slot in the Mini8. Up to 4 may be fitted in a Mini8. Each input can be configured to any thermocouple type or a linear mV input. The TC4 module offers TC1 to TC4, on terminals A to H 18 A Ø TC1 + B Ø TC1 - C Ø TC2 + D Ø TC2 - E Ø TC3 + F Ø TC3 - G Ø TC4 + H Ø TC4 - I Ø TC5 + J Ø TC5 - K Ø TC6 + L Ø TC6 - M Ø TC7 + N Ø TC7 - O Ø TC8 + P Ø TC8 - Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 1.4.11 RTD / PT100 Input RT4 The RT4 module provides 4 RTD inputs for 2, 3 or 4 wire connections. They may be placed in any slot in the Mini8. Up to 4 may be fitted in a Mini8. Each input can be configured for any resistive sensor up to 600 ohms. Standard limearisation is available for PT100. A Ø CH1 Current + B Ø CH1 Sense + C Ø CH1 Sense ─ D Ø CH1 Current ─ E Ø CH2 Current + F Ø CH2 Sense + G Ø CH2 Sense ─ H Ø CH2 Current ─ I Ø CH3 Current + J Ø CH3 Sense + K Ø CH3 Sense ─ L Ø CH3 Current ─ M Ø CH4 Current + N Ø CH4 Sense + O Ø CH4 Sense ─ P Ø CH4 Current ─ 2 3 4 wire connection Note 2, 3 or 4 wire connection must also be selected in the input channel configuration, IO.Mod.n.IOType. ☺ Tip: Spare RT4 input channels may be configured as mA inputs using a 2.49 ohm resistor, order code SubMini8/resistor/Shunt/249R.1. See 7.6.3 for configuration. A Ø CH1 Current + B Ø CH1 Sense + C Ø CH1 Sense ─ D Ø CH1 Current ─ Part No HA028581 Issue 3 Sep-05 mA in 2.49 ohm mA out 19 Engineering Handbook Mini8 Controller 1.4.12 Logic Input DI8 The DI8 module provides 8 logic inputs. They may be placed in any slot in the Mini8. Up to 4 may be fitted in a Mini8. A Ø D1 + B Ø D1 - 0V C Ø D2 + +24V D Ø D2 - 0V E Ø D3 + +24V F Ø D3 - G Ø D4 + H Ø D4 - I Ø D5 + J Ø D5 - K Ø D6 + L Ø D6 - M Ø D7 + N Ø D7 - O Ø D8 + P Ø D8 - +24V 0V +24V 0V +24V 0V +24V 0V +24V 0V +24V 0V Digital Inputs : ON requires > 10.8V with 2mA drive, 30V max. 20 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 1.4.13 Logic Output DO8 The DO8 module provides 8 logic outputs. They may be placed in any slot in the Mini8. Up to 4 may be fitted in a Mini8. Each output can be configured to Time Proportioning or On/Off. 24V A Ø Supply In + 0V B Ø Supply In + C Ø OP 1 + + D Ø OP 2 + – E Ø OP 3 + F Ø OP 4 + G Ø Supply & OP - H Ø Supply & OP - SSR 1 SSRs 2 to 7 I Ø Supply In + J Ø Supply In + K Ø OP 5 + L Ø OP 6 + M Ø OP 7 + N Ø OP 8 + + O Ø Supply & OP - – P Ø Supply & OP - SSR 8 Supply In + (A,B,I,J) are all linked internally. Supply In – (G,H,O,P) are all linked internally. Part No HA028581 Issue 3 Sep-05 21 Engineering Handbook Mini8 Controller 1.4.14 Relay Output RL8 The RL8 module provides 8 relay outputs. Up to 2 modules may be fitted and in slots 2 and/or 3 only A Ø RLY1 A B Ø RLY1 B C Ø RLY2 A D Ø RLY2 B E Ø RLY3 A F Ø RLY3 B G Ø RLY4 A H Ø RLY4 B I Ø RLY5 A J Ø RLY5 B K Ø RLY6 A L Ø RLY6 B M Ø RLY7 A N Ø RLY7 B O Ø RLY8 A P Ø RLY8 B Relay contacts for full contact life: Maximum 264V ac 2amps with snubber fitted. Minimum 5V dc, 10mA Snubbers are used to prolong the life of relay contacts and to reduce interference when switching inductive devices such as contactors or solenoid valves. If the relay is used to switch a device with a high impedance input, no snubber is necessary. All relay modules are fitted internally with a snubber since these are generally required to switch inductive devices. However, snubbers pass 0.6mA at 110V and 1.2mA at 230Vac, which may be sufficient to hold on high impedance loads. If this type of device is used it will be necessary to remove the snubber from the circuit. The relay module has to be removed from the instrument. See Section 1.5. The snubber is removed from the relay module by inserting a screwdriver into one of the pair of slots either side of the track of each snubber network. Twist the screwdriver to break out this track between the slots. This action is not reversible. 22 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 1.4.15 Analogue Output AO4 and AO8 The AO8 modules provides 8 analogue outputs and the AO4 provides 4 analogue outputs. Each output is configurable within 0 to 20 mA , max load 360 ohm. The AO4 offers OP1 to OP4 on terminals A to H. Only one module may be fitted and in slot 4 only. A Ø OP 1 + B Ø OP 1 - C Ø OP 2 + D Ø OP 2 - E Ø OP 3 + F Ø OP 3 - G Ø OP 4 + H Ø OP 4 - I Ø OP 5 + J Ø OP 5 - K Ø OP 6 + L Ø OP 6 - M Ø OP 7 + N Ø OP 7 - O Ø OP 8 + P Ø OP 8 - ☺ Tip: A 0 to 10 volt output can be obtained by scaling the drive to 0 to 10mA and fitting an external 1kohm resistor (for example). Low load impedance may alter the results but this can be corrected by adjusting the output range accordingly. Part No HA028581 Issue 3 Sep-05 23 Engineering Handbook Mini8 Controller 1.4.16 Current Transformer input Module CT3 This provides inputs for 3 current transformers. The heater load cables are threaded through the transformers. Each input is 50mA max into 5 ohms. A Ø Reserved B Ø Reserved C Ø Reserved D Ø Reserved E Ø Reserved F Ø Reserved G Ø Reserved H Ø Reserved I Ø In 1 A J Ø In 1 B K Ø no connection L Ø In 2 A M Ø In 2 B N Ø no connection o Ø In 3 A P Ø In 3 B The current transformers provide channel isolation; there is no channel to channel isolation in the module. It is recommended that the current transformer is fitted with a voltage limiting device such as two back to back zener diodes between 3 and 10 volts, rated for 50mA. There are 3 CT inputs, one for each phase. Up to a maximum of 16 heaters may be threaded through the CTs but with a further limit of 6 heater wires through each individual CT. See Chapter 7.9 for typical circuit arrangements. To CT input on CT3 module CT 24 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 1.5 Engineering Handbook Adding or replacing an IO module. Modules contain static sensitive electronic devices. Take full antistatic protection when replacing modules by working on an earthed mat with an earthed wrist strap. Avoiding touching components, keep fingers on the green connectors or the edge of the printed circuit boards. Remove screw → ← Remove screw Figure 1-4: Mini8 Cover Retaining Screws 1. 2. 3. 4. 5. 6. 7. 8. Part No HA028581 Remove all connectors. Remove the 2 screws indicated above Remove the cover. If removing a module gently prise it out using the green connectors. Insert the new module carefully using the guides on the side of the case to help to line up the lower connector with its mate on the motherboard. This requires great care as the guides provide mechanical support rather than being plug in guides. Once you are certain the two connectors are lined up, push the module gently into place. Do NOT force. Replace cover and the 2 cover screws. Replace all connectors onto their correct modules. Issue 3 Sep-05 25 Engineering Handbook 1.6 Mini8 Controller Mini 8 LED Indicators Two sets of 3 LEDs on the front panel indicate the power, the state of the output relays, the status of the Mini8 and communications activity. Legend LED Function OFF ON P Green Indicates 24V No power Powered Legend RN CC LED Function OFF Blinking ON Green Indicates run mode Not running Standby Running Green Indicates Configuration -Config traffic -- A Red Relay A state De-energised Energised B Red Relay B state De-energised Energised FC Modbus/Profibus Green Field comms activity Offline Traffic DeviceNet/CANopen Green Status Offline Ready Connected Ethernet* Green Field comms activity No port traffic Port traffic excluding local housekeeping * The Ethernet connector itself has two in-built LEDs : Green = network activity Yellow = Mini8 communicating The Mini8 is controlling normally ONLY if the green RN LED is permanently ON. 26 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 2. CHAPTER 2 USING THE MINI8 The Mini8 Controller does not have a display. The only means of configuring it, and of interfacing with it during normal operation is via communications. The auxiliary communications port CC (RJ11) gives a Modbus interface usually connected to iTools for configuration and commissioning. The main communications port FC offers Modbus, DeviceNet, CANopen, Profibus, or Ethernet normally connected to the system of which the Mini8 is part, and is the means by which the Mini8 is operated. Below are ways the Mini8 may be used in a system. iTools is the best PC based solution. The Modbus single register addressing is best for Operator panels, PLCs where floating point may not be available or necessary. Some parameters may also be read this way as floats or long integers. 2.1 iTools iTools offers a pc based solution. The iTools suite allows configuration, commissioning, trend graphs and logging with OPC Scope, Program Editing, Recipes and User pages with View Builder. 2.1.1 iTools OPC Open server With an OPEN OPC server running on a PC all the Mini8 parameters are available to any third party package with an OPC client. The advantage of this is that all the parameters are addressed by name – the iTools OPC server handles all the physical communication addresses. An example would be with Wonderware inTouch using OPCLink. In this situation the user would not have to know any of the parameter addresses, and would just select a parameter by browsing through the namespace. e.g. Eurotherm.ModbusServer.1.COM1.ID001-Mini8.Loop.1.Main.PV 2.2 Modbus, single register, SCADA addressing The key parameters of the Mini8 are available at a fixed single 16 bit register address, independent of its configuration. These can be used with any device with a serial Modbus master (Modbus function 4). The parameters are listed in full with their addresses in Appendix A. By default iTools displays the SCADA address of those parameters which are available. As shown, not all the parameters within the instrument are available. If other parameters are required they can be obtained by using the Commstab folder. This allows up to 250 other parameters to be made available using indirection addressing. This is explained in Appendix A. Also note that in this area the resolution (number of decimal points) has to be configured and the serial Master has to scale the parameter correctly. Part No HA028581 Issue 3 Sep-05 27 Engineering Handbook 2.3 Mini8 Controller Modbus (Floating Point) If the application requires the extra resolution, the Commstab folder also offers an alternative solution where a parameter can be indirectly addressed and communicated either as a floating point or as a double integer value – its ‘Native’ format. This can be used with any device e.g. PC or plc, with a serial Modbus master, able to decode a double register for floating point numbers (Modbus function 7) and long integers (Modbus function 8). See Appendix A. 2.4 Fieldbus The Mini8 may be ordered with the option of DeviceNet, Profibus or CanOPEN. DeviceNet comes pre-configured with the key parameters of 8 PID loops and alarms (60 input parameters process variables, alarm status etc and 60 output parameters – setpoints etc.). Loops 9-16 are not included in the DeviceNet tables as there are insufficient attributes for the DeviceNet parameters. See Appendix B. CANopen offers 4 receive & 4 Transmit PDOs and 1 server SDO with a 200 parameter pick list. See Appendix C Profibus is set up using a GSD editor included on the iTools CD. The GSD editor sets up the instrument parameters that are required to be communicated with the master. 2.5 Ethernet The Mini8 may be ordered with an Ethernet connection (10baseT) running ModbusTCP as the protocol. An instrument can therefore have a unique identity on the Ethernet network as well as a unique Modbus address for the Modbus master. 2.6 Mini8 Execution The nominal update of all inputs and function blocks is 110ms. However, in complex applications the Mini8 will automatically extend this time in multiples of 110ms. For example, eight simple heat/cool loops each with two alarms (40 wires) will run at 110ms, while the full EC8 configuration will run at 220ms because of the extra wiring and functionality. The communications traffic will also have some effect on the update rate. For example, an application using every function block and all 250 wires will run at 220ms with light communications traffic but may be slowed to 330ms with heavy traffic. Note that as loading changes, the sample rate may increase or decrease automatically. In order to recover to a faster sample rate, the Mini8 must be running consistently with processing power to spare for at least 30s. 28 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 2.7 Engineering Handbook The iTools Operator Interface Much of this manual is about configuring the Mini8 with iTools. However iTools also provides an excellent commissioning tool and can be used as a long-term operator view if convenient. First it is necessary to go ‘on-line’ to the Mini8(s). This assumes the communication ports have been wired up to the COM port on the iTools computer (Chapter 10). 2.7.1 Scanning Open iTools and, with the controller connected, press on the iTools menu bar. iTools will search the communications ports for recognisable instruments. Controllers connected using the RJ11 configuration port or with the configuration clip (CPI), may be found at address 255 (as a single point to point connection) or on a multidrop RS485 or RS422 network will be found at the address configured in the controller. The iTools handbook, part no. HA026179, provides further step by step instructions on the general operation of iTools. This and the iTools software may be downloaded from www.eurotherm.co.uk. When an instrument is found on the network it will be shown as, for example ‘COM1.ID001-Min8’ which represents <computer com port>.ID<instrument address>-<Instrument type> Stop the scan once all the instruments have been found. Once an instrument is found on the network a message ‘’sync pending’ or synchronizing’ is displayed next to it whilst iTools extracts the exact configuration from the instrument. Wait until this message disappears. 2.7.2 Browsing and Changing Parameter Values Once the instrument is synchronized the parameter navigation tree is displayed. The contents of this tree will vary depending on the actual configuration of the instrument. The folders shown will be some of those which are always present – e.g Instrument, IO, Comms, Access as well as the configuration dependent onese.g. Loops, Alarm, Lgc2 etc. which have been configured. Part No HA028581 Issue 3 Sep-05 29 Engineering Handbook Mini8 Controller To view or change a parameter: 1. Highlight the folder 2. Press to get the parameter window or open up the parameter list by clicking on the required folder. Right click in the parameter list to reveal or hide columns. 3. To change the value of a parameter, a. click the parameter value, b. write in the new value. Note a pop-up window indicates the current value, and the high and low limits. c. Hit <Enter> to enter the new value or <Escape> to cancel. The ‘Access’ button puts the controller into configuration mode. In this mode the controller can be set up without its outputs being active. Press ‘Access’ again to return to operating level. To find a parameter use the ‘Find’ tab at the bottom of the folder list. ☺ Tip: ☺ Tip: 30 In parameter lists: Parameters in BLUE are read only Parameters in BLACK are read/write. Every parameter in the parameter lists has a detailed description in the help file – just click on a parameter and hit Shift-F1 on the keyboard or right click and select parameter help. Part No HA028581 Issue 3 Sep-05 Mini8 Controller 2.8 Engineering Handbook Recipe Editor Press for this feature. Up to 8 recipes can be stored. They can also be named by the user. Recipes allow the operator to change the operating values of up to 24 parameters in an instrument for different batch items/processes by simply selecting a particular recipe to load. Recipes are important for reducing error in setup and they remove the need for operator instructions fixed to the panel next to the instrument. Note: Loading a recipe set causes the instrument to enter Standby mode momentarily during which time it does not control. The Recipe Editor is used during configuration to assign the required parameters and to set up the values to be loaded for each recipe. 2.8.1 Recipe Menu Commands Command Load Recipe Save Edit Parameter Delete Parameter Edit Parameter Value Rename Parameter Tag Parameter Properties Copy Parameter Paste Parameter Columns Load Access Level Level1 Config Never Edit Data Set Value Clear Data Set Value Part No HA028581 Issue 3 Description Used to load a recipe file into the instrument Used to save the current recipe configuration into a file Used to assign a parameter to a Tag. Parameters can also be assigned by 'drag and drop' from the iTools parameter list Used to delete an assigned parameter from the recipes Used to edit the current value of the assigned parameter Allows the user to rename the Tag of the associated parameter. This tag is used on the instrument to identify assigned parameters (default Value1 - Value24) Used to find the properties and help information of the selected parameter Used to copy the currently selected parameter Used to assign a previously copied parameter to the selected Tag Used to hide/show the Description and Comment Columns Used to configure the lowest access level in which the selected recipe is allowed to load Permitted to load when the instrument is in any of the access levels Permitted to load when the instrument is in the Config access level Never permitted to load Used to edit the value of the selected assigned parameter within the selected recipe. Values can also be edited via double left clicking the value itself Used to clear the value of the selected assigned parameter within the selected recipe, thus disabling it from loading when the recipe is selected to load Sep-05 31 Engineering Handbook Command Rename Data Set Snapshot Values Description Allows the user to rename the selected recipe. This name is used to identify individual recipes (default Set1 - Set8). Note: Number of recipes dependent upon features Used to clear all values in the selected recipe, thus disabling all from loading when the recipe is selected to load Used to copy all of the assigned parameters current values into the selected recipe Copy Data Set Paste Data Set Used to copy all values of the selected recipe Used to paste all values of a previously copied recipe into the selected recipe Clear Data Set 2.9 Mini8 Controller OPCScope OPC scope is a standalone OPC client that can be used to attach to the iTools OPCserver. It offers real time trend charts and data logging to disc in a .csv (comma separated variable) format which can easily be opened by a spreadsheet such as Excel. With iTools open OPC Scope can be started using the icon . But it can also be started on its own using the Windows Start/Programs/Eurotherm iTools/OPC Scope and the OPC server will start up (if it is not running) and will Select Server/Connect or click the icon display the active ports on the computer. Opening the COM port will show the attached instruments as shown below. The ‘ID001-Mini8’ folder will contain all the same folders for the instrument that would have been seen in iTools itself. Expand the folder and double click on the blue item tag to add to the List Window. The List Window shows all the selected parameters and their current value. Right click on a parameter to get the context menu. 32 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 2.9.1 Engineering Handbook OPC Scope List Window Context Menu Command Save Copy Item DDE link Copy/Paste Item Add Item Remove Item Write Value Item appears on Chart Item Properties Description Saves the OPC Scope configuration as <filename>.uix See Section 2.9.3 Saves the DDE path to the clipboard. ‘Paste Special’ in an Excel cell and select ‘Paste Link’ and the current parameter value will be displayed in the cell. Copy & Paste Add a new variable by name (easier to browse the navigation tree) Remove the selected item. Write a new value (not if the item is Read Only). Up to 8 items can be trended on the Chart Window Gives the item properties as seen by OPC The OPC List can contain parameters from any instrument attached to the Modbus network. If you have iTools Open (not iTools Standard) then OPC Scope can run on a remote networked computer. Enter the name of the server computer (attached to the instruments) the ‘Computer’ window and browse for the ‘Eurotherm.ModbusServer1’. 2.9.2 OPC Scope Chart Window Click the Chart tab at the bottom of the display window and select Chart Control Panel. 1. Items. Includes all the items in the list window. Those items ticked (up to 8) will appear on the chart. 2. Axes. Allows time intervals from 1 minute to 1 month. Vertical axes can be ‘auto’ scaled or a fixed range may be entered. 3. General. Allows selection of colours, grid, legends and a data box. 4. Plot. Allows selection of line thickness and printing 5. Review. Allows review of early history charts. These are also available on the toolbar. Part No HA028581 Issue 3 Sep-05 33 Engineering Handbook Mini8 Controller iTools Trend Graph showing Loop1 SP and PV The 34 icon allows the chart to occupy all the window space. Part No HA028581 Issue 3 Sep-05 Mini8 Controller 2.9.3 Engineering Handbook OPC Server ITools and OPC Scope all use the Eurotherm OPC Server to provide the connection between the instruments and the computer displays. When you ‘scan’ for instruments on iTools it is in fact the OPC Server that is actually doing the work in background ( the window is not usually displayed). OPC Scope can run on its own but for it to find the instruments on the network it is necessary to tell the server where they are. 1. Start OPC Server (Windows Start/Programs/Eurotherm iTools/OPC Server) 2. On the menu go to ‘Network’ and select ‘Start One-Shot Scan’ 3. Stop the scan when all the instruments have been found. 4. On the menu go to ‘File’ and select ‘Save As’ and save the file with a suitable name. 5. Once saved you will be asked ‘Would you like to make this file the default start server address file?’ – select ‘Yes’. 6. Close the server. Now if you double click on an OPC Scope file e.g. Mini8 Project.uix then this file will open OPC Scope and in turn, in background, OPC scope will open the OPC Server with this instrument file loaded. OPC Scope will then be active with live data from the instrument(s). Part No HA028581 Issue 3 Sep-05 35 Engineering Handbook Mini8 Controller 3. CHAPTER 3 CONFIGURATION USING iTOOLS WARNING Configuration level gives access to a wide range of parameters that match the controller to the process. Incorrect configuration could result in damage to the process being controlled and/or personal injury. It is the responsibility of the person commissioning the process to ensure that the configuration is correct. In configuration level the controller may not be controlling the process or providing alarm indication. Do not select configuration level on a live process. 3.1 Configuration The Mini8 is supplied unconfigured, unless ordered preconfigured, e.g. EC8. An unconfigured Mini8 has to be configured for use in an application. This is performed using iTools. The iTools handbook, part no. HA026179 provides further step by step instructions on the general operation of iTools. This and the iTools software may be downloaded from www.eurotherm.co.uk. 3.1.1 On-Line/Off-line Configuration If iTools is connected to a real Mini8 then all the parameter changes made will be written to the device immediately. Once the Mini8 is configured and working as required, its final configuration can be saved to disk as a ‘clone’ file of the format <name>.uic. Alternatively iTools can be used ‘off-line’ without a real Mini8 connected at all. This virtual Mini8 can be created in iTools and again saved to disk as a clone file. This file can later be loaded into a real Mini8 to create the required real application. See Section 3.3 . 3.2 3.2.1 Connecting a PC to the Mini8 Controller Configuration Cable and Clip The controller may be connected to the PC running iTools using the Eurotherm cable SubMin8/Cable/Config from the RJ11 port connecting to a serial port on the PC. Alternatively a Configuration Clip is available from Eurotherm that can be fitted into the rear of the controller. The benefit of using this arrangement is that it is not necessary to power the controller, since the clip provides the power to the internal memory of the controller. 3.2.2 Scanning Open iTools and, with the controller connected, press on the iTools menu bar. iTools will search the communications ports and TCP/IP connections for recognisable instruments. Controllers connected using the RJ11 configuration port or with the configuration clip (CPI), will be found at address 255 regardless of the address configured in the controller. These connections only work from iTools to a single controller. The iTools handbook, part no. HA026179, provides further step by step instructions on the general operation of iTools. This and the iTools software may be downloaded from www.eurotherm.co.uk. In the following pages it is assumed that the user is familiar with iTools and has a general understanding of Windows. 36 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 3.3 Engineering Handbook Cloning Saving a Clone File On the iTools menu ‘File – Save to File’ allows the clone file of the attached Mini8 to be saved to disc as <user name>.UIC file. This can be loaded into another Mini8. Note that after synchronization iTools using uses a ‘quick’ save and will only resave parameters that have been changed through iTools itself. If there is any chance that parameters have been changed through the other port then it is necessary to resave all the parameters. On the menu bar under Options – Cloning ensure Reload is selected. The safest option is to keep Ask selected. Loading a clone file On the iTools menu ‘File – Load values File’ allows a clone file of the form <user name>.UIC to be loaded into an attached Mini8 unit. Whilst loading, the report window will indicate what is happening. It makes a number of attempts to load all the values and may report some errors. This is generally not an issue. If for some reason the load fails iTools will report specifically that the load ‘Failed’ Communications port parameters A Mini8 clone file contains information on both the CC and FC port config settings. Depending on which comms port is used to load a clone file cloning will behave in a different manner. Loading the clone file through the FC port will cause the CC port settings to be updated Loading the clone file through the CC port will cause the FC port settings to be updated Part No HA028581 Issue 3 Sep-05 37 Engineering Handbook 3.4 Mini8 Controller Configuring the Mini8 Once iTools is successfully connected to a Mini8, it can be configured for the application in hand. Configuration involves selection of the required elements of functionality called ‘function blocks’ and setting their parameters to the correct values. The next stage is to connect all the function blocks together to create the required strategy of control for the application. 3.4.1 Function Blocks The controller software is constructed from a number of ‘function blocks’. A function block is a software device that performs a particular duty within the controller. It may be represented as a ‘box’ that takes data in at one side (as inputs), manipulates the data internally (using internal parameter values) and ‘outputs’ the results. Some of these internal parameters are available to the user so that they can be adjusted to suit the characteristics of the process that is to be controlled. A representation of a function block is shown below. Name – corresponds to Folder Output Parameters Input Parameters Internal Parameters Figure 3-1: Example of a Function Block In the controller, parameters are organised in simple lists. The top of the list shows the list header. This corresponds to the name of the function block and is generally presented in alphabetical order. This name 38 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook describes the generic function of the parameters within the list. For example, the list header ‘AnAlm’ contains parameters that enable you to set up analogue alarm conditions. 3.4.2 Soft Wiring Soft Wiring (sometimes known as User Wiring) refers to the connections that are made in software between function blocks. Soft wiring, which will generally be referred to as ‘Wiring’ from now on is created during the instrument configuration using the iTools configuration package. In general every function block has at least one input and one output. Input parameters are used to specify where a function block reads its incoming data (the ‘Input Source’). The input source is usually wired from the output of a preceding function block. Output parameters are usually wired to the input source of subsequent function blocks. All parameters shown in the function block diagrams are also shown in the parameter tables, in the relevant chapters, in the order in which they appear in iTools. Figure 3.2 shows an example of how the thermocouple is wired to the PID Loop input and the PID Loop channel 1 (heat) output is wired to the time proportioning logic output. PID output to logic output t/c to PID input Figure 3-2: Function Block Wiring Part No HA028581 Issue 3 Sep-05 39 Engineering Handbook 3.5 Mini8 Controller Simple Worked Example Using function blocks and wiring the following sections will show a blank Mini8 being configured to have one PID loop. 3.5.1 The I/O With the Mini8 successfully connected to iTools configuration can begin. ☺ Tip: In parameter lists: Parameters in BLUE are read only Parameters in BLACK are read/write. ☺ Tip: Every parameter in the parameter lists has a detailed description in the help file – just click on a parameter and hit Shift-F1 on the keyboard or right click and select parameter help. The I/O will already have been installed in the Mini8 and can be checked in iTools. Figure 3-3: Mini8 I/O Modules This unit has an 8 thermocouple input board in slot 1, a CT3 input card in slot 2, and 2 DO8 output cards in slot 3 and slot 4. Clicking on the ‘Mod’ tab will enable the first channel of the thermocouple card to be configured. Firstly the Mini8 has to be put into configuration mode. Go to Device/Access/Configuration or click on the Access button: 40 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Figure 3-4: Thermocouple Input Select the I/O type, linearisation, units, resolution etc. required. Parameter details are in Section 7.5. The other thermocouple channels can be found by using the 2,3,4…7,8 tabs on the top of the parameter window. Slot 2 in the Mini8 has a CT3 input card and this is configured elsewhere so the Tabs 9 to 16 are not shown. Slot 3 has a DO8 output card and the first channel of this will be on tab 17 (to 24) Slot 4 has a DO8 output card and the first channel of this will be on tab 25 (to 32) Figure 3-5: Digital Output Channel Set this channel up as required, IOType, MinOnTime etc. as required. The parameters are detailed in Section 7.3. The remaining channels on this slot will be found under the tabs 18 to 24. Slot 4 also contains a DO8 output card with outputs under tabs 25 to 32. The fixed I/O is always there and there is nothing that has to be configured. The Current Monitor is covered in Chapter 7.9. Part No HA028581 Issue 3 Sep-05 41 Engineering Handbook 3.5.2 Mini8 Controller Wiring The IO that has been configured now needs to be wired to PID loops and other function blocks. Select (GWE) to create and edit instrument wiring. The Graphical Wiring Editor window To add a function block drag it from the list and drop it on this editor. To add IO first expand the IO block (click the + ) and then expand the Mod to show the IO channels 1 to 32 Similarly to add a loop first expand the loop block (click the +) to show loops 1 to 8 Figure 3-6: List of Function Blocks & Graphical Wiring Window The left window now contains a list of the function blocks available. 42 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Use drag and drop to select the first thermocouple from IOMod 1, the Cool output from IOMod 17 and the Heat output from IOMod 25 and drop them on the wiring window. Finally take the first PID block from Loop/Loop 1 and drop it on the wiring window. Note that as each block is used it greys out on the list. There should now be 4 blocks on the window. Those blocks are shown with dotted lines, as they have not been loaded into the Mini8. First make the following wire connections. 1. Click on IO.Mod1.PV and move the pointer to Loop 1.MainPV and click again. A dotted wire will have connected the two together. 2. Similarly join Loop1.OP.Ch1Out to IOMod 25.PV (heat output) 3. Enable the Cool output by clicking the select arrow to the top of the loop block: click here and select PID output 4. Loop1.OP.Ch2Out to IOMod 17.PV (cool output) Figure 3-7: Wired Blocks before download 5. Part No HA028581 Issue 3 Right click on the Loop 1 function Block and select ‘Function Block View’. This opens the Loop parameter list on top of the wiring editor. Sep-05 43 Engineering Handbook Mini8 Controller Figure 3-8: PID Function Block This enables the PID function block to be set up to suit the required application. See Chapter 17 for details. 44 6. Click on the instrument button to download the application: 7. Once downloaded the dotted lines around the function blocks and the wires will become solid to show that the application is now in the Mini8. The upper status line also shows that 3 wires have been used out of those available. Max is 250 but quantity depends on number of wires ordered (30, 60, 120 or 250). 8. Put the Mini8 back into Operating mode by clicking the Access button: 9. The Mini8 will now control the Loop1 as configured. Part No HA028581 Issue 3 Sep-05 Mini8 Controller 3.6 Engineering Handbook Graphical Wiring Editor Select monitor parameter values. (GWE) to view and edit instrument wiring. You can also add comments and 1. Drag and drop required function blocks into the graphical wiring from the list in the left pane 2. Click on parameter to be wired from and drag the wire to the parameter to be wired to (do not hold mouse button down) 3. Right click to edit parameter values 4. Select parameter lists and switch between parameter and wiring editors 5. Download to instrument when wiring completed 6. Add comments and notes 7. Dotted lines around a function block show that the application requires downloading Add comment and notes Blocks ‘clear’ when used Indicates execution order Right click to edit parameter values Part No HA028581 Issue 3 Sep-05 Click this button to wire unshown parameters 45 Engineering Handbook 3.6.1 Mini8 Controller Graphical Wiring Toolbar Download Grab & Pan Pan Drawing Delete, Undo & Redo IO Setup 3.6.2 Select Zoom Drawing Grid on/off Function Block A Function Block is an algorithm that may be wired to and from other function blocks to make a control strategy. The Graphical Wiring Editor groups the instrument parameters into function blocks. Examples are: a control loop and a mathematical calculation. Each function block has inputs and outputs. Any parameter may be wired from, but only parameters that are alterable may we wired to. A function block includes any parameters that are needed to configure or operate the algorithm. 3.6.3 Wire A wire transfers a value from one parameter to another. They are executed by the instrument once per control cycle. Wires are made from an output of a function block to an input of a function block. It is possible to create a wiring loop, in this case there will be a single execution cycle delay at some point in the loop. This point is shown on the diagram By a || symbol and it is possible to choose where that delay will occur. 3.6.4 Block Execution Order The order in which the blocks are executed by the instrument depends on the way in which they are wired. The order is automatically worked out so that the blocks execute on the most recent data. 3.6.5 Using Function Blocks If a function block is not faded in the tree then it can be dragged onto the diagram. The block can be dragged around the diagram using the mouse. A labelled loop block is shown here. The label at the top is the name of the block. When the block type information is alterable click on the box with the arrow in it on the right to edit that value. The inputs and outputs that are considered to be of most use are always shown. In most cases all of these will need to be wired up for the block to perform a useful task. There are exceptions to this and the loop is one of those exceptions. If you wish to wire from a parameter, which is not shown as a recommended output click on the icon in the bottom right, and a full list of parameters in the block will be shown, click on one of these to start a wire. To start a wire from a recommended output just click on it. Click the icon in the bottom right hand corner to wire other function block parameters not shown on the list on the right hand side. 46 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 3.6.5.1 Engineering Handbook Function Block Context Menu Right clicking displays the context menu with the following entries. Function Block View… Re-Route Wires Re-Route Input Wires Re-Route Output Wires Show wires using tags Hide Unwired Connections Copy Delete Undelete Bring To Front Push To Back Edit Parameter Value Parameter Properties Parameter Help 3.6.6 Brings up an iTools parameter list which shows all the parameters in the function block. If the block has sub-lists these are shown in tabs Throw away current wire route and do an auto-route of all wires connected to this block Only do a re-route on the input wires Only do a re-route on the output wires Shows the beginning and end of each wire with a descriptor showing the source or destination. Used to simplify a diagram with many wires. Hides function block pins that are not used. Right click over an input or output and copy will be enabled, this menu item will copy the iTools "url" of the parameter which can then be pasted into a watch window or OPC Scope If the block is downloaded mark it for delete, otherwise delete it immediately This menu entry is enabled if the block is marked for delete and unmarks it and any wires connected to it for delete Bring the block to the front of the diagram. Moving a block will also bring it to the front Push the block to the back of the diagram. Useful of there is something underneath it This menu entry is enabled when the mouse is over an input or output parameter. When selected it creates a parameter edit dialog so the value of that parameter can be changed Selecting this entry brings up the parameter properties window. The parameter properties window is updated as the mouse is moved over the parameters shown on the function block Selecting this entry brings up the help window. The help window is updated as the mouse is moved over the parameters shown on the function block. When the mouse is not over a parameter name the help for the block is shown Tooltips Hovering over different parts of the block will bring up tooltips describing the part of the block beneath the mouse. If you hover over the parameter values in the block type information a tooltip showing the parameter description, its OPC name, and, if downloaded, its value will be shown. A similar tool-tip will be shown when hovering over inputs and outputs. Part No HA028581 Issue 3 Sep-05 47 Engineering Handbook 3.6.7 Mini8 Controller Function Block State The blocks are enabled by dragging the block onto the diagram, wiring it up, and downloading it to the instrument When the block is initially dropped onto the diagram it is drawn with dashed lines. When in this state the parameter list for the block is enabled but the block itself is not executed by the instrument. Once the download button is pressed the block is added to the instrument function block execution list and it is drawn with solid lines. If a block which has been downloaded is deleted, it is shown on the diagram in a ghosted form until the download button is pressed. This is because it and any wires to/from it are still being executed in the instrument. On download it will be removed from the instrument execution list and the diagram. A ghosted block can be undeleted using the context menu. When a dashed block is deleted it is removed immediately. 48 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 3.6.8 Using Wires 3.6.8.1 Making A Wire Between Two Blocks • • • Drag two blocks onto the diagram from the function block tree. • Start a wire by either clicking on a recommended output or clicking on the icon at the bottom right corner of the block to bring up the connection dialog. The connection dialog shows all the connectable parameters for the block, if the block has sub-lists the parameters are shown in a tree. If you wish to wire a parameter which is not currently available click the red button at the bottom of the connection dialog. Recommended connections are shown with a green plug, other parameters which are available are yellow and if you click the red button the unavailable parameters are shown red. To dismiss the connection dialog either press the escape key on the keyboard or click the cross at the bottom left of the dialog. • Once the wire has started the cursor will change and a dotted wire will be drawn from the output to the current mouse position. To make the wire either click on a recommended input to make a wire to that parameter or click anywhere except on a recommended input to bring up the connection dialog. Choose from the connection dialog as described above. The wire will now be auto-routed between the blocks. New wires are shown dotted until they are downloaded 3.6.8.2 Wire Context Menu The wire block context menu has the following entries on it. Force Exec Break If wires form a loop a break point has to be found where the value which is written to the block input comes from a block which was last executed during the previous instrument execute cycle thus introducing a delay. This option tells the instrument that if it needs to make a break it should be on this wire Re-Route Wire Throw away wire route and generate an automatic route from scratch Use Tags If a wire is between blocks which are a long way apart, then, rather than drawing the wire, the name of the wired to/from parameter can be shown in a tag next to the block. Draw the wire first then use this menu to toggle this wire between drawing the whole wire and drawing it as tags Find Start Find End Delete Undelete Bring To Front Push To Back Find the source of the selected wire Find the destination of the selected wire If the wire is downloaded mark it for delete, otherwise delete it immediately This menu entry is enabled if the wire is marked for delete and unmarks it for delete Bring the wire to the front of the diagram. Moving a wire will also bring it to the front Push the wire to the back of the diagram Part No HA028581 Issue 3 Sep-05 49 Engineering Handbook 3.6.8.3 Mini8 Controller Wire Colours Wires can be the following colours: Black Red Blue Purple 3.6.8.4 Normal functioning wire. The wire is connected to an input which is not alterable when the instrument is in operator mode and so values which travel along that wire will be rejected by the receiving block The mouse is hovering over the wire, or the block to which it is connected it selected. Useful for tracing densely packed wires The mouse is hovering over a 'red' wire Routing Wires When a wire is placed it is auto-routed. The auto routing algorithm searches for a clear path between the two blocks. A wire can be auto-routed again using the context menus or by double clicking the wire. If you click on a wire segment you can drag it to manually route it. Once you have done this it is marked as a manually routed wire and will retain it's current shape. If you move the block to which it is connected the end of the wire will be moved but as much of the path as possible of the wire will be preserved. If you select a wire by clicking on it, it will be drawn with small boxes on it's corners. 3.6.8.5 Tooltips Hover the mouse over a wire and a tooltip showing the names of the parameters which are wired and, if downloaded, their current values will also be shown. 3.6.9 Using Comments Drag a comment onto the diagram and the comment edit dialog will appear. Type in a comment. Use new lines to control the width of the comment, it is shown on the diagram as typed into the dialog. Click OK and the comment text will appear on the diagram. There are no restrictions on the size of a comment. Comments are saved to the instrument along with the diagram layout information. Comments can be linked to function blocks and wires. Hover the mouse over the bottom right of the comment and a chain icon will appear, click on that icon and then on a block or a wire. A dotted wire will be drawn to the top of the block or the selected wire segment. 3.6.9.1 Comment Context Menu The comment context menu has the following entries on it. Edit Unlink Delete Undelete Bring To Front Push To Back 50 Open the comment edit dialog to edit this comment If the comment is linked to a block or wire this will unlink it If the comment is downloaded mark it for delete, otherwise delete it immediately This menu entry is enabled if the comment is marked for delete and unmarks it for delete Bring the comment to the front of the diagram. Moving a comment will also bring it to the front Push the comment to the back of the diagram. Useful if there is something underneath it Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 3.6.10 Using Monitors Drag a monitor onto the diagram and connect it to a block input or output or a wire as described in ‘Using Comments’. The current value (updated at the iTools parameter list update rate) will be shown in the monitor. By default the name of the parameter is shown, double click or use the context menu to not show the parameter name. 3.6.10.1 Monitor Context Menu The monitor context menu has the following entries on it. Show Names Unlink Delete Undelete Bring To Front Push To Back Show parameter names as well as values If the monitor is linked to a block or wire this will unlink it If the monitor is downloaded mark it for delete, otherwise delete it immediately This menu entry is enabled if the monitor is marked for delete and unmarks it for delete Bring the monitor to the front of the diagram. Moving a monitor will also bring it to the front Push the monitor to the back of the diagram. Useful if there is something underneath it 3.6.11 Downloading The wires have to be downloaded to the instrument together. When the wiring editor is opened the current wiring and diagram layout is read from the instrument. No changes are made to the instrument function block execution or wiring until the download button is pressed. When a block is dropped on the diagram instrument parameters are changed to make the parameters for that block available. If you make changes and close the editor without saving them there will be a delay while the editor clears these parameters. When you download, the wiring is written to the instrument that then calculates the block execution order and starts executing the blocks. The diagram layout including comments and monitors is then written into instrument flash memory along with the current editor settings. When you reopen the editor the diagram will be shown positioned the same as when you last downloaded. 3.6.12 Selections Wires are shown with small blocks at their corners when selected. All other items have a dotted line drawn round them when they are selected. 3.6.12.1 Selecting Individual Items Clicking on an item on the drawing will select it. 3.6.12.2 Multiple Selection Control click an unselected item to add it to the selection, doing the same on a selected item unselects it. Alternatively, hold the mouse down on the background and wipe it to create a rubber band, anything which isn't a wire inside the rubber band will be selected. Selecting two function blocks also selects any wires which join them. This means that if you select more than one function block using the rubber band method any wires between them will also be selected. Pressing Ctrl-A selects all blocks and wires. Part No HA028581 Issue 3 Sep-05 51 Engineering Handbook Mini8 Controller 3.6.13 Colours Items on the diagram are coloured as follows: Red Blue Purple Function blocks, comments and monitors which partially obscure or are partially obscured by other items are drawn red. If a large function block like the loop is covering a small one like a math2 the loop will be drawn red to show that it is covering another function block. Wires are drawn red when they are connected to an input which is currently unalterable. Parameters in function blocks are coloured red if they are unalterable and the mouse pointer is over them Function blocks, comments and monitors which are not coloured red are coloured blue when the mouse pointer is over them. Wires are coloured blue when a block to which the wire is connected is selected or the mouse pointer is over it. Parameters in function blocks are coloured blue if they are alterable and the mouse pointer is over them A wire which is connected to an input which is currently unalterable and a block to which the wire is connected is selected or the mouse pointer is over it is coloured purple (red + blue) 3.6.14 Diagram Context Menu The diagram context menu has the following entries on it:Re-Route Wires Align Tops Align Lefts Space Evenly Delete Undelete Copy Graphic Save Graphic 52 Throw away current wire route and do an auto-route of all selected wires. If no wires are selected this is done to all wires on the diagram Line up the tops of all the selected items except wires Line up the left hand side of all the selected items except wires This will space the selected items such that their top left corners are evenly spaced. Select the first item, then select the rest by control-clicking them in the order you wish them to be spaced, then choose this menu entry Marks all selected items for deletion (will be deleted on next download). This menu entry is enabled if any of the selected items are marked for deletion and unmarks them when selected If there is a selection it is copied to the clipboard as a Windows metafile, if there is no selection the whole diagram is copied to the clipboard as a Windows metafile. Paste into your favourite documentation tool to document your application. Some programs render metafiles better than others, the diagram may look messy on screen but it should print well Same as Copy Graphic but saves to a metafile rather than putting it on the clipboard Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 3.6.15 Wiring Floats with Status Information There is a subset of float values which may be derived from an input which may become faulty for some reason, e.g. sensor break, overrange, etc. These values have been provided with an associated status which is automatically inherited through the wiring. The list of parameters which have associated status is as follows:Block Loop.Main Loop.SP Math2 Input Parameters PV In1 In2 Programmer.Setup Poly Load PVIn In Lin16 Txdr IPMonitor SwitchOver In InVal In In1 In2 In In1 to 8 In1 to 8 Total Mux8 Multi-oper Lgc2 UsrVal Humidity IO.MOD In1 In2 Val WetTemp DryTemp PsychroConst Pressure 1.PV to 32.PV Output Parameters PV TrackPV Out Out PVOut1 PVOut2 Out OutVal Out Out SumOut, MaxOut, MinOut, AverageOut Val RelHumid DewPoint 1.PV to 32.PV Parameters appear in both lists where they can be used as inputs or outputs depending on configuration. The action of the block on detection of a ‘Bad’ input is dependent upon the block. For example, the loop treats a ‘Bad’ input as a sensor break and takes appropriate action; the Mux8 simply passes on the status from the selected input to the output, etc. The Poly, Lin16, SwitchOver, Multi-Operator, Mux8, IO.Mod.n.PV blocks can be configured to act on bad status in varying ways. The options available are as follows:0: Clip Bad The measurement is clipped to the limit it has exceeded and its status is set to ‘BAD’, such that any function block using this measurement can operate its own fallback strategy. For example, control loop may hold its output to the current value. 1: Clip Good The measurement is clipped to the limit it has exceeded and its status is set to ‘GOOD’, such that any function block using this measurement may continue to calculate and not employ its own fallback strategy. 2: Fallback Bad The measurement will adopt the configured fallback value that has been set by the user. In addition the status of the measured value will be set to ‘BAD’, such that any function block using this measurement can operate its own fallback strategy. For example, control loop may hold its output to the current value. 3: Fallback Good The measurement will adopt the configured fallback value that has been set by the user. In addition the status of the measured value will be set to ‘GOOD’, such that any function block using this measurement may continue to calculate and not employ its own fallback strategy Part No HA028581 Issue 3 Sep-05 53 Engineering Handbook Mini8 Controller 4: Up Scale The measurement will be forced to adopt its high limit. This is like having a resistive pull up on an input circuit. In addition the status of the measured value will be set to ‘BAD’, such that any function block using this measurement can operate its own fallback strategy. For example, the control loop may hold its output to the current value. 5: Down Scale The measurement will be forced to adopt its low limit. This is like having a resistive pull down on an input circuit. In addition the status of the measured value will be set to ‘BAD’, such that any function block using this measurement can operate its own fallback strategy. For example, the control loop may hold its output to the current value. 3.6.16 Edge Wires If the Loop.Main.AutoMan parameter were wired from a logic input in the conventional manner it would be impossible to put the instrument into manual via communications. Other parameters need to be controlled by wiring but also need to be able to change under other circumstances, e.g. Alarm Acknowledgements. for this reason some Boolean parameters are wired in an alternative way. These are listed as follows:SET DOMINANT When the wired in value is 1 the parameter is always updated. This will have the effect of overriding any changes through digital communications. When the wired in value changes to 0 the parameter is initially changed to 0 but is not continuously updated. This permits the value to be changed through digital communications. Loop.Main.AutoMan Programmer.Setup.ProgHold Access.StandBy RISING EDGE When the wired in value changes from 0 to 1, a 1 is written to the parameter. At all other times the wire does not update the parameter. This type of wiring is used for parameters that start an action and when once completed the block clears the parameter. When wired to, these parameters can still be operated via digital communications. Loop.Tune.AutotuneEnable Programmer.Setup.ProgRun Programmer.Setup.AdvSeg Programmer.Setup.SkipSeg Txdr.ClearCal Txdr.StartCal Txdr.StartHighCal Txdr.StartTare IPMonitor.Reset Alarm.Ack DigAlarm.Ack AlmSummary.GlobalAck Instrument.Diagnostics. ClearStats BOTH EDGE This type of edge is used for parameters which may need to be controlled by wiring or but should also be able to be controlled through digital communications. If the wired in value changes then the new value is written to the parameter by the wire. At all other times the parameter is free to be edited through digital communications. Loop.SP.RateDisable 54 Loop.OP.RateDisable Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 4. CHAPTER 4 MINI8 OVERVIEW Input and output parameters of function blocks are wired together using software wiring to form a particular control strategy within the Mini8. An overview of all the available functions and where to get more detail is shown below. Inputs Mod.1 to Mod.32 Thermocouples T/C, RTD, mA, mV Chapter 7.5, 7.6 Setpoint Loop/SP folder Folder Chapter 17.6 Input Linearisation Lin 16 Folder Chapter 15 Polynomial Poly Folder Chapter 15 FixedIO / IO Dig Inputs Logic Input Chap. 7.8, 7.2 BCD Input BCD In Folder Chapter 9 Switchover SwOver Folder Chapter 19 Transducer Scaling Outputs Loops 1 to 16 Mod.1 to Mod.32 Logic Output Loop Folder Chapter 7.3 Chapter 17 Programmer Prog Folder Application specific To plant devices FixedIO /IO Relay O/P Chapter 12 Chap. 7.8, 7.4 Alarm(s) Alarm Folder Chapter 8 Digital Alarms Dig Alm Folder Chapter 8.3 Alarm Summary Alarm Summary Folder Chapter 8.7 Maths Math2 & Mux8 Folder Chapter 20 Maths Lgc2 & Lgc8 Folder Chapter 14 Chapter 21 Timer/Clock/ Counter/Totaliser Current I/p Chapter 11 IO.Current Monitor Folder Field Comms Chapter 7.9 Chapter 7.7 Humidity Zirconia Chapter 14 User Values Mod.25 to Mod.32 Analogue OP Chapter 18 Txdr Folder UsrVal Folder Current Transformers Control Processes Comms/FC Folder PC, plc Chapter 10 Figure 4-1: Controller Example Mini8 series controllers are supplied unconfigured, and with those blocks included in the order code. Option EC8 is supplied with function blocks pre-wired to give an 8 loop heat/cool controller suitable for Extrusion. See data sheet HA028519. The purpose of the PID control blocks is to reduce the difference between SP and PV (the error signal) to zero by providing a compensating output to the plant via the output driver blocks. The timer, programmer and alarms blocks may be made to operate on a number of parameters within the controller, and digital communications provides an interface to data collection and control. The controller can be customised to suit a particular process by ‘soft wiring’ between function blocks. Part No HA028581 Issue 3 Sep-05 55 Engineering Handbook 4.1 Mini8 Controller Complete list of Function Blocks. The list opposite represents an unconfigured Mini8 that has been ordered with all features enabled. If a particular block or blocks do not appear in your instrument then the option has not been ordered. Check the order code of your instrument and contact Eurotherm. Examples of features that may not have been enabled are: Loops Programmer Recipe Humidity Once a block is dragged and dropped onto the graphical wiring window, the block icon in the block list opposite will be greyed out. At the same time a folder containing the blocks parameters will have been created in the Browse List. 56 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 5. CHAPTER 5 ACCESS FOLDER Folder: Access Sub-folder: none Name Parameter Description Value ClearMemory Cold start the instrument No App LinTables InitComms Wires AllMemory Programs CustomerID Standby Part No HA028581 Disabled Mini8 memory reset but comms and linearisation tables retained Custom Linearisation tables are deleted Comms ports reset to default configurations Clear all wiring All instrument memory is set to default values All Programs cleared Default Access Level No Conf Customer Identifier Reference number for customer use 0 Oper Set Instrument to standby No / Yes No Oper Issue 3 Sep-05 57 Engineering Handbook Mini8 Controller 6. CHAPTER 6 INSTRUMENT FOLDER 6.1 Instrument / Enables The following table lists the options that can be enabled in the instrument. Enable flags are one bit for each item – i.e.Bit (0=1) enables item 1, Bit 1 (=2) item 2, Bit(3=4) item 3 and so on to Bit7(=128) enables Item 8. All 8 items enabled adds up to 255. ☺ Tip: Features are not normally enabled this way. Dragging and dropping a function block onto the graphical wiring window automatically sets the required enable flag. Folder: Instrument Sub-folder: Enables Name Parameter Description Value AlarmEn1 Analogue alarms Enable Flags Alarms 1 to 8 AlarmEn2 Default Access Level 0 (none) to 255 (all 8) 0 Conf Analogue alarms Enable Flags Alarms 9 to 16 0 (none) to 255 (all 8) 0 Conf AlarmEn3 Analogue alarms Enable Flags Alarms 17 to 24 0 (none) to 255 (all 8) 0 Conf AlarmEn4 Analogue alarms Enable Flags Alarms 25 to 32 0 (none) to 255 (all 8) 0 Conf BCDInEn BCD switch input Enable Flags BCD input 1 and 2 0 Conf CounterEn Counters Enable Flags Counters1 and 2 0 (none) to 3 (both) 0 Conf CurrentMon Current Monitor Enable Flag 0 = Off 1 = On 0 Conf DigAlmEn1 Digital alarms Enable Flags Dig Alarms 1 to 8 0 (none) to 255 (all 8) 0 Conf DigAlmEn2 Digital alarms Enable Flags Dig Alarms 9 to 16 0 (none) to 255 (all 8) 0 Conf DigAlmEn3 Digital alarms Enable Flags Dig Alarms 17 to 24 0 (none) to 255 (all 8) 0 Conf DigAlmEn4 Digital alarms Enable Flags Dig Alarms 25 to 32 0 (none) to 255 (all 8) 0 Conf HumidityEn Humidity control Enable Flag 0 = off 1 = On 0 Conf IP Mon En Input monitor Enable Flags Input Monitor 1 and 2 0 (none) to 3 (both) 0 Conf Lgc2 En1 Logic operators Enable Flags Logic operators 1 to 8 0 (none) to 255 (all 8) 0 Conf Lgc2 En2 Logic operators Enable Flags Logic operators 9 to 16 0 (none) to 255 (all 8) 0 Conf Lgc2 En3 Logic operators Enable Flags Logic operators 17 to 24 0 (none) to 255 (all 8) 0 Conf Lgc8 En Logic 8 operator Enable Flags 8 input Logic operators 1 & 2 0 (none) to 3 (both) 0 Conf Lin16Pt En Input linearisation 16 point Input Linearisation 1 and 2 0 Conf Load En Load Enable Flags Loads 1 to 8 As order code Conf Load En2 Load Enable Flags Loads 9 to 16 As order code Conf Loop En Loop Enable Flags Loops 1 to 8 As order code Conf Loop En2 Loop Enable Flags Loops 9 to 16 As order code Conf Math2 En1 Analogue (Maths) Operators Enable Flags Analogue operators 0 to 8 0 (none) to 255 (all 8) 0 Conf Math2 En2 Analogue (Maths) Operators Enable Flags Analogue operators 9 to 16 0 (none) to 255 (all 8) 0 Conf Math2 En3 Analogue (Maths) Operators Enable Flags Analogue operators 17 to 24 0 (none) to 255 (all 8) 0 Conf 0 (none) to 3 (both) (Only if CT3 module fitted) 58 0 (none) to 3 (both) 0 (none) to 255 (all 8) 0 (none) to 255 (all 8) 0 (none) to 255 (all 8) 0 (none) to 255 (all 8) Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Folder: Instrument Sub-folder: Enables Name Parameter Description Value Default Access Level MultiOperEn Analogue Multi- Operator Enable Flags Multi-operators 0 to 4 0 (none) to 15 (all 4) 0 Conf Mux8 En Multiplexor Enable Flags 8 input multiplexor 1 and 2 0 (none) to 3 (both) 0 Conf Poly En Polynomial linearisation block Enable Flags Poly Linearisation 1 and 2 0 Conf Prog En Programmer Enable Flags 0 = off, 1 to 8 0 Conf RTClock En Real time clock Enable Flags 0 = off 1 = On 0 Conf SwOver En Switch over block Enable Flags 0 = off 1 = On 0 Conf Timer En Timers Enable Flags Timers 1 to 4 0 = none to 15 = 4 0 Conf Totalise En Totalisers Enable Flags Totalisers 1 & 2 0 Conf TrScale En Transducer scaling Enable Flags Transducer scalers 1 and 2 0 Conf UsrVal En1 User values Enable Flags User Values 1 to 8 0 (none) to 255 (all 8) 0 Conf UsrVal En2 User values Enable Flags User Values 9 to 16 0 (none) to 255 (all 8) 0 Conf UsrVal En3 User values Enable Flags User Values 17 to 24 0 (none) to 255 (all 8) 0 Conf UsrVal En4 User values Enable Flags User Values 25 to 32 0 (none) to 255 (all 8) 0 Conf Zirconia En Zirconia Input Functions 0 = off 1 = On 0 Conf 6.2 0 (none) to 3 (both) 0 (none) to 255 (all 8) 0 (none) to 3 (both) 0 (none) to 3 (both) Instrument Options Folder: Instrument Sub-folder: Options Name Parameter Description Value Default Access Level Units Units °C,°F or Kelvin scale for all temperature parameters DegC Oper ProgPVstart To enable PV start No, Yes – see section 18 No Conf 6.3 Instrument / InstInfo Folder: Instrument Sub-folder: InstInfo Name Parameter Description Value InstType Default Access Level Instrument Type MINI8 NONE Version Version Identifier - NONE Serial No Serial Number Passcode1 Passcode1 0 to 65535 Oper Passcode2 Passcode2 0 to 65535 Oper Passcode3 Passcode3 0 to 65535 Oper CompanyID CompanyID Part No HA028581 Issue 3 Sep-05 NONE 1280 NONE 59 Engineering Handbook 6.4 Mini8 Controller Instrument / Diagnostics This list provides fault finding diagnostic information as follows:- Folder: Instrument Sub-folder: Diagnostics Name Parameter Description CPUFree MinCPUFree CtrlTicks Max Con Tick This is the amount of free CPU Time left. It shows the percentage of the tasks ticks that are idle. A benchmark of the lowest reached value of the CPU free percentage. This is the number of ticks that have elapsed while the instrument was performing the control Task. A benchmark of the maximum number of ticks that have elapsed while the instrument was performing the control Task Resets the instrument performance benchmarks. The number of errors logged since the last Clear Log. Note: If an error occurs multiple times only the first occurrence will be logged each event will increment the count. The first error 0 There is no error to occur 1 Bad or unrecognised module ident. A module has been inserted and has a bad or unrecognised The second ident. Either the module is damaged or the module is unsupported. error to occur The third error 3 Factory calibration data bad. The factory calibration data has been read from an I/O module and has not passed the checksum test. Either the module is damaged or has not been initialised. to occur The fourth 4 Module changed for one of a different type. A module has been changed for one of a different error to occur type. The configuration may now be incorrect The fifth error 10 Calibration data write error. An error has occurred when attempting to write calibration data to occur back to an I/O module's EE. The sixth error 11 Calibration data read error. An error occurred when trying to read calibration data back from the to occur EE on an I/O module. The seventh 18 Checksum error. The checksum of the NVol Ram has failed. The NVol is considered corrupt and error to occur there the instrument configuration may be incorrect. The eight error to occur 20 Resistive identifier error. An error occurred when reading the resistive identifier from an i/o Clear Stats ErrCount Err1 Err2 Err3 Err4 Err5 Err6 Err7 Err8 module. The module may be damaged. 43 Invalid custom linearisation table. One of the custom linearisation tables is invalid. Either it has failed checksum tests or the table downloaded to the instrument is invalid. 55 The Instrument wiring is either invalid or corrupt. 56 Non-vol write to volatile. An attempt was made to perform a checksummed write to a nonchecksummed area 58 Recipe load failure. The selected recipe failed to load 59 Bad User CT calibration data. Corrupted or invalid user calibration data for the current monitor 60 Bad Factory CT calibration data. Corrupted or invalid factory calibration data for the current monitor 62 to 65 Slot1 card DFC1 to DFC4 error 66 to 69 Slot2 card DFC1 to DFC4 error 70 to 73 Slot3 card DFC1 to DFC4 error 74 to 77 Slot4 card DFC1 to DFC4 error Clear Log UserStringCount UserStringCharSpace Segments Left 60 The generic I/O DFC chip will not communicate. This could indicate a build fault. Clears the error log entries and count. Number of User Strings Defined Space Available For User Strings. Number of Available Program Segments Gives the number of unused program segments. Each time a segment is allocated to a program, this value is reduced by one. Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Folder: Instrument Sub-folder: Diagnostics Name Parameter Description CtrlStack Control Stack Free Space (words) The number of words of un-used stack for the control task Comms Stack Free Space (words) The number of words of un-used stack for the comms task Idle Stack Free Space (words) The number of words of un-used stack for the idle (background) task. Max number of setpoint programmer segments available Specifies the maximum number of segments that can be configured for a single program Indicates the amount of control overrun. Shows type of PSU fitted 0 = Mains 1= 24V dc Counts the number of times the instrument power has been switched off. Name for custom linearisation table 1 Name for custom linearisation table 2 Name for custom linearisation table 3 CommsStack IdleStack Max segments MaxSegsPerProg CntrlOverrun PSUident PwrFailCount Cust1Name Cust2Name Cust3Name Part No HA028581 Issue 3 Sep-05 61 Engineering Handbook Mini8 Controller 7. CHAPTER 7 I/O FOLDER This lists the modules fitted into the instruments, all the IO channels, the fixed IO and the current monitoring. The IO folder lists all the channels of each of the IO boards in the 4 available slots. Each board has up to 8 inputs or outputs making a maximum of 32 channels. The channels are listed under Mod1 to Mod32. Slot Channels 1 IO.Mod.1 to IO.Mod.8 2 IO.Mod.9 to IO.Mod.16 3 IO.Mod.17 to IO.Mod.24 4 IO.Mod.25 to IO.Mod.32 Note that the current transformer input, CT3, is not included in this arrangement. There is a separate folder for current monitoring under IO.CurrentMonitor. If this board is fitted into slot 2 the IO.Mod.9 to Mod.16 would not exist. 7.1 Module ID Folder: IO Sub-folder: ModIDs Name Parameter Description Value Default Access Level Module1 Module1Ident 0 NoMod – No Module 0 Read Only 0 Read 24 DO8Mod – 8 logic outputs Module2 Module2Ident 18 RL8Mod – 8 relay outputs 60 DI8 – 8 logic inputs Only 90 CT3Mod – 3 current transformer inputs Module3 Module3Ident 131 TC8Mod – 8 thermocouple/mV inputs 0 Read 133 TC4Mod – 4 thermocouple/mV inputs Only 173 RT4 – 4 PT100 inputs Module4 Module4Ident 201 AO8Mod – 8 0-20 mA outputs (Slot 4 only) 0 Read Only 203 AO4Mod – 4 0-20 mA outputs (Slot 4 only) 7.1.1 Modules The content of the Mod folders depends on the type of IO module fitted in each slot. These will be covered in the following sections. 62 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 7.2 Engineering Handbook Logic Input Each DI8 card provides 8 logic input channels (voltage controlled) to the system. These can be wired to provide digital inputs to any function block within the system. 7.2.1 Logic Input Parameters Folder – IO Sub-folder Mod.1 to .32 Name Parameter Description Value Ident Channel Identity LogicIn IOType IO Type OnOff On off input Invert Sets the sense of the logic input No No inversion Yes Inverted On/Off Value seen at the terminals Measured Val Measured Value Default Access Level Read Only Conf No Conf Off Read Only PV Part No HA028581 Process Variable Issue 3 Sep-05 On/Off Value after allowing for Invert Off Read Only 63 Engineering Handbook 7.3 Mini8 Controller Logic Output If a slot is fitted with a DO8 board then 8 channels will be available to be configured and connected to Loop outputs, alarms or other logic signals. 7.3.1 Logic Out Parameters Folder – IO Sub-folder Mod.1 to .32 Name Parameter Description Value Ident Channel Identity LogicOut IOType IO Type OnOff On off output Time Prop Time proportioning output Sets the sense of the logic input or output No No inversion Yes Inverted Action taken by output when instrument goes into Standby Mode Off, On Switches On/Off Continue Remains in its last state Invert SbyAct Default Access Level Read Only Conf No Conf Off Conf Auto Oper The next five parameters are only shown when ‘IO Type’ = ‘Time Prop’ outputs MinOnTime Minimum output on/off time. Prevents relays from switching too rapidly Auto 0.01 to 150.00 seconds Auto = 20ms. This is the fastest allowable update rate for the output DisplayHigh The maximum displayable reading 0.00 to 100.00 100.00 Oper DisplayLow The minimum displayable reading 0.00 to 100.00 0.00 Oper RangeHigh The maximum (electrical) input/output level 0.00 to 100.00 100 Oper RangeLow The minimum (electrical) input/output level 0.00 to 100.00 0 Oper The current value of the output demand signal to the hardware including the effect of the Invert parameter. 0 Off 1 On This is the desired output value, before the Invert parameter is applied 0 to 100 Always displayed MeasuredVal PV Read only Oper or 0 to 1 (OnOff) PV can be wired from the output of a function block. For example if it is used for control it may be wired from the control loop output (Ch1 Output). 7.3.2 Logic Output Scaling If the output is configured for time proportioning control, it can be scaled such that a lower and upper level of PID demand signal can limit the operation of the output value. By default, the output will be fully off for 0% power demand, fully on for 100% power demand and equal on/off times at 50% power demand. You can change these limits to suit the process. It is important to note, however, that these limits are set to safe values for the process. For example, for a heating process it may be required to maintain a minimum level of temperature. This can be achieved by applying an offset at 0% power demand which will maintain the output on for a period of time. Care must be taken to ensure that this minimum on period does not cause the process to overheat. 64 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook If Range Hi is set to a value <100% the time proportioning output will switch at a rate depending on the value - it will not switch fully on. Similarly, if Range Lo is set to a value >0% it will not switch fully off. PID Demand signal Disp Hi eg 100% Disp Lo eg 0% Output state Range Lo = 0% Output permanently off Range Hi = 100% Output permanently on Figure 7-1: Time Proportioning Output 7.3.3 Example: To Scale a Proportioning Logic Output Access level must be configuration. In this example the output will switch on for 8% of the time when the PID demand wired to ‘PV’ signal is at 0%. Similarly, it will remain on for 90% of the time when the demand signal is at 100% Part No HA028581 Issue 3 Sep-05 65 Engineering Handbook 7.4 Mini8 Controller Relay Output If slot 2 and/or 3 is fitted with a RL8 board then 8 channels will be available to be configured and connected to Loop outputs, alarms or other logic signals. 7.4.1 Relay Parameters Folder – IO Sub-folder Mod.9 to .24 Name Parameter Description Value Ident Channel Identity Relay IOType IO Type OnOff On off output Time Prop Time proportioning output Sets the sense of the logic input or output No No inversion Yes Inverted Action taken by output when instrument goes into Standby Mode Off, On Switches On/Off Continue Remains in its last state Invert SbyAct Default Access Level Read Only Conf No Conf Off Conf Auto Oper The next five parameters are only shown when ‘IO Type’ = ‘Time Prop’ outputs MinOnTime Minimum output on/off time. Prevents relays from switching too rapidly Auto 0.01 to 150.00 seconds Auto = 220ms. This is the fastest allowable update rate for the output DisplayHigh The maximum displayable reading 0.00 to 100.00 100.00 Oper DisplayLow The minimum displayable reading 0.00 to 100.00 0.00 Oper RangeHigh The maximum (electrical) input/output level 0.00 to 100.00 100 Oper RangeLow The minimum (electrical) input/output level 0.00 to 100.00 0 Oper The current value of the output demand signal to the hardware including the effect of the Invert parameter. 0 Off 1 On This is the desired output value, before the Invert parameter is applied 0 to 100 Always displayed MeasuredVal PV Read only Oper or 0 to 1 (OnOff) 66 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 7.5 Engineering Handbook Thermocouple Input A TC4 offers 4 channels and the TC8 board offers 8 channels which may be configured as thermocouple inputs or mV inputs. 7.5.1 Thermocouple Input Parameters Folder – IO Sub-headers: Mod .1 to .32 Name Parameter Description Value Default Ident Channel Ident TCinput IO Type IO Type Thermocouple For direct t/c connection mV For mV inputs, usually linear, scaled to engineering units. Access Level Read Only Conf Lin Type Input linearisation see section 7.5.2 Conf Units Display units used for units conversion see section 7.5.2 Conf Resolution Resolution XXXXX to X.XXXX Sets scaling for digital communications using the SCADA table CJC Type To select the cold junction compensation method Internal See description in section 7.3.3. for further details 0oC Conf Internal Conf 45oC 50oC External Off SBrk Type Low Sensor break will be detected when its impedance is greater than a ‘low’ value High Sensor break will be detected when its impedance is greater than a ‘high’ value Off No sensor break Sets the alarm action when a sensor break condition is detected ManLatch Manual latching NonLatch No latching Off No sensor break alarm Sensor Break alarm acknowledge No DisplayHigh The maximum display value in engineering units -99999 to 99999 DisplayLow The minimum display value in engineering units -99999 to 99999 RangeHigh The maximum (electrical) input mV RangeLow to 70 RangeLow The minimum (electrical) input mV -70 to RangeHigh Fallback Fallback Strategy Downscale Meas Value = Input range lo - 5% See also section 7.5..5. Upscale Meas Value = Input range Hi + 5% Fall Good Meas Value = Fallback PV Fall Bad Meas Value = Fallback PV SBrk Alarm AlarmAck Part No HA028581 Sensor break type Issue 3 Sep-05 Conf Oper see also the alarm Chapter 8 Alarms No Oper 100 Oper For IO Type mV only 0 Oper Limits apply to Linear and SqRoot linearisation. 70 Oper 0 Oper Yes See 7.3.7 Conf 67 Engineering Handbook Folder – IO Name Fallback PV Mini8 Controller Sub-headers: Mod .1 to .32 Parameter Description Value Default Clip Good Meas Value = Input range Hi/lo +/- 5% Clip Bad Meas Value = Input range Hi/lo +/- 5% Fallback value Instrument range Access Level Conf See also section 7.5.5. Filter Time Constant Input filter time. Off to 500:00 (hhh:mm) 1s600ms Oper An input filter provides damping of the input signal. This may be necessary to prevent the effects of excessive noise on the PV input. s:ms to hhh:mm Measured Val The current electrical value of the PV input PV The current value of the PV input after linearisation Instrument range LoPoint Low Point Lower cal point (See 7.5.6) 0.0 Oper LoOffset Low Offset Offset at lower point 0.0 Oper HiPoint High Point Higher cal point 0.0 Oper HiOffset High Offset Offset at Higher point 0.0 Oper Offset Used to add a constant offset to the PV Instrument range 0.0 Oper CJC Temp Reads the temperature of the rear terminals at the thermocouple connection R/O SBrk Value Sensor break Value R/O R/O R/O see section 75.7 Used for diagnostics only, and displays the sensor break trip value Cal State Calibration State. Calibration of the PV Input is described in Chapter 22.3 Idle Status PV Status 0 - OK Normal operation The current status of the PV. 1 - Startup Initial startup mode 2 - SensorBreak Input in sensor break 4 – Out of range PV outside operating limits 6 - Saturated Saturated input 8 – Not Calibrated Uncalibrated channel 25 – No Module No Module SbrkOutput 68 Sensor Break Output Conf R/O Off /On R/O Part No HA028581 Issue 3 Sep-05 Mini8 Controller 7.5.2 Engineering Handbook Linearisation Types and Ranges Input Type J K L R B N T S PL2 C Linear SqRoot Custom 7.5.3 Thermocouple type J Thermocouple type K Thermocouple type L Thermocouple type R Thermocouple type B Thermocouple type N Thermocouple type T Thermocouple type S Thermocouple Platinel II Custom mV linear input Square root Customised linearisation tables Min Range Max Range Units Min Range -210 -200 -200 -50 0 -200 -200 -50 0 1200 1372 900 1700 1820 1300 400 1768 1369 o C C oC oC oC oC oC oC oC -238 -238 -238 -58 32 -238 -238 -58 32 -70 70 mV o Max Range 2192 2498 1652 3124 3308 2372 752 3214 2466 F F oF oF oF oF oF oF oF o o CJC Type A thermocouple measures the temperature difference between the measuring junction and the reference junction. The reference junction, therefore, must either be held at a fixed known temperature or accurate compensation be used for any temperature variations of the junction. 7.5.3.1 Units Measuring junction Internal Compensation The controller is provided with a temperature sensing device which senses the temperature at the point where the thermocouple is joined to the copper wiring of the instrument and applies a corrective signal. Reference junction Where very high accuracy is needed and to accommodate multi-thermocouple installations, larger reference units are used which can achieve an accuracy of ±0.1°C or better. These units also allow the cables to the instrumentation to be run in copper. The reference units are contained basically under three techniques, Ice-Point, Hot Box and Isothermal. 7.5.3.2 The Ice-Point There are usually two methods of feeding the EMF from the thermocouple to the measuring instrumentation via the ice-point reference, the bellows type and the temperature sensor type. The bellows type utilises the precise volumetric increase which occurs when a known quantity of ultra pure water changes state from liquid to solid. A precision cylinder actuates expansion bellows which control power to a thermoelectric cooling device. The temperature sensor type uses a metal block of high thermal conductance and mass, which is thermally insulated from ambient temperatures. The block temperature is lowered to 0°C by a cooling element, and maintained there by a temperature sensing device. Special thermometers are obtainable for checking the 0°C reference units and alarm circuits that detect any movement from the zero position can be fitted. 7.5.3.3 The Hot Box Thermocouples are calibrated in terms of EMF generated by the measuring junctions relative to the reference junction at 0°C. Different reference points can produce different characteristics of thermocouples, therefore referencing at another temperature does present problems. However, the ability of the hot box to work at very high ambient temperatures, plus a good reliability factor has led to an increase in its usage. The unit can consist of a thermally insulated solid aluminium block in which the reference junctions are embedded. The block temperature is controlled by a closed loop system, and a heater is used as a booster when initially switching on. This booster drops out before the reference temperature, usually between 55°C and 65°C, is reached, but the stability of the hot box temperature is now important. Measurements cannot be taken until the hot box reaches the correct temperature. Part No HA028581 Issue 3 Sep-05 69 Engineering Handbook 7.5.3.4 Mini8 Controller Isothermal Systems The thermocouple junctions being referenced are contained in a block which is heavily thermally insulated. The junctions are allowed to follow the mean ambient temperature, which varies slowly. This variation is accurately sensed by electronic means, and a signal is produced for the associated instrumentation. The high reliability factor of this method has favoured its use for long term monitoring. 7.5.3.5 CJC Options in Mini8 Series 0 – Internal 1 – 0C 2 – 45C 3 – 50C 4 – External 5 – Off 7.5.4 CJC measurement at instrument terminals CJC based on external junctions kept at 0C (Ice Point) CJC based on external junctions kept at 45C (Hot Box) CJC based on external junctions kept at 50C (Hot Box) CJC based on independent external measurement CJC switched off Sensor Break Value The controller continuously monitors the impedance of a transducer or sensor connected to any analogue input. This impedance, expressed as a % of the impedance which causes the sensor break flag to trip, is a parameter called ‘SBrkValue’. The table below shows the typical impedance which causes sensor break to trip for various types of input and high and low SBrk Impedance readings. The impedance values are only approximate (±25%) as they are not factory calibrated. 7.5.5 TC4/TC8 Input SBrk Impedance – High ~ 12KΩ Range -77 to +77mV SBrk Impedance – Low ~ 3KΩ Fallback A Fallback strategy may be used to configure the default value for the PV in case of an error condition. The error may be due an out of range value, a sensor break, lack of calibration or a saturated input. The Status parameter would indicate the error condition and could be used to diagnose the problem. Fallback has several modes and may be associated with the Fallback PV parameter The Fallback PV may be used to configure the value assigned to the PV in case of an error condition. The Fallback parameter should be configured accordingly. The fallback parameter may be configured so as to force a Good or Bad status when in operation. This in turn allows the user to choose to override or allow error conditions to affect the process. 70 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 7.5.6 Engineering Handbook User Calibration (Two Point) All ranges of the controller have been calibrated against traceable reference standards. However in a particular application it may be necessary to adjust the displayed reading to overcome other effects within the process. A two point calibration is offered allowing offset and slope adjustment. This is most useful where the setpoints used in a process cover a wide range. The Low and High points should be set on or near the extremities of the range. Display Reading High offset (e.g. 2.9°) Factory calibration Low offset (e.g. 1.1°) Low point (e.g. 50°) 7.5.7 High point (e.g. 500°) Measured Reading PV Offset (Single Point) All ranges of the controller have been calibrated against traceable reference standards. This means that if the input type is changed it is not necessary to calibrate the controller. There may be occasions, however, when you wish to apply an offset to the standard calibration to take account of known errors within the process, for example, a known sensor error or a known error due to the positioning of the sensor. In these instances it is not advisable to change the reference calibration, but to apply a user defined offset. A single point offset is most useful where the process setpoint remains at nominally the same value. PV Offset applies a single offset over the full display range of the controller and can be adjusted in Operator Mode. It has the effect of moving the curve up a down about a central point as shown in the example below:Display Reading Factory calibration Fixed offset (e.g. 2.1°) 7.5.7.1 Example: To Apply an Offset:- Measured Reading • Connect the input of the controller to the source device which you wish to calibrate to • Set the source to the desired calibration value • The controller will show the current measurement of the value • If the value is correct, the controller is correctly calibrated and no further action is necessary. If you wish to offset the reading use the Offset parameter where Corrected value (PV) = input value + Offset. Part No HA028581 Issue 3 Sep-05 71 Engineering Handbook 7.5.8 Mini8 Controller Using TC4 or TC8 channel as a mV input Example – a pressure sensor provides 0 to 33mV for 0 to 200 bar. 1. Set IO type as mV 2. Set the Linearisation Type as Linear 3. Set DisplayHigh to 200 (bar) 4. Set DisplayLow to 0 (bar) 5. Set RangeHigh to 33 mV 6. Set RangeLow to 0 mV Note maximum input range is ± 70 mV 72 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 7.6 Engineering Handbook Resistance Thermometer Input The RT4 module offers 4 resistance inputs which can be linear or PT100. 7.6.1 RT Input Parameters Folder – IO Sub-headers: Mod .1 to .32 Name Parameter Description Value Ident Channel Ident RTinput IO Type IO Type RTD2 RTD3 Default Access Level Read Only For 2 wire, 3 wire or 4 wire connections. Conf RTD4 Lin Type Linearisation Type See section 7.6.2 Conf Units Display units used for units conversion See section 7.6.2 Conf Resolution Resolution XXXXX to X.XXXX Sets scaling for digital communications using the SCADA table Conf SBrk Type Sensor break type Low Sensor break will be detected when its impedance is greater than a ‘low’ value Conf High Sensor break will be detected when its impedance is greater than a ‘high’ value SBrk Alarm AlarmAck Fallback Off No sensor break Sets the alarm action when a sensor break condition is detected ManLatch Manual latching NonLatch No latching Off No sensor break alarm Sensor Break alarm acknowledge No Fallback Strategy Downscale Meas Value = Input range lo - 5% See also section 7.4..5. Upscale Meas Value = Input range Hi + 5% Fall Good Meas Value = Fallback PV Fall Bad Meas Value = Fallback PV Clip Good Meas Value = Input range Hi/lo +/- 5% No Oper Yes Clip Bad Fallback PV Oper see also the alarm Chapter 8 Alarms Fallback value Conf Meas Value = Input range Hi/lo +/- 5% Instrument range Conf See also section 7.4.5. Filter Time Constant Input filter time. Off to 500:00 (hhh:mm) An input filter provides damping of the input signal. This may be necessary to prevent the effects of excessive noise on the PV input. s:ms to hhh:mm Measured Val The current electrical value of the PV input PV The current value of the PV input after linearisation Instrument range LoPoint Low Point Lower cal point (See 7.5.6) 0.0 Oper LoOffset Low Offset Offset at lower cal point 0.0 Oper Part No HA028581 Issue 3 Sep-05 1s600ms Oper R/O R/O 73 Engineering Handbook Folder – IO Mini8 Controller Sub-headers: Mod .1 to .32 Name Parameter Description HiPoint High Point HiOffset Offset Value Default Access Level Higher cal point 0.0 Oper High Offset Offset at Higher cal point 0.0 Oper Used to add a constant offset to the PV Instrument range 0.0 Oper see section 7.5.7 SBrk Value Sensor break Value R/O Used for diagnostics only, and displays the sensor break trip value Cal State Status SbrkOutput 7.6.2 Calibration State. Calibration of the PV Input is described in Chapter 22.3 Idle PV Status 0 - OK Normal operation The current status of the PV. 1 - Startup Initial startup mode 2 - SensorBreak Input in sensor break 4 – Out of range PV outside operating limits 6 - Saturated Saturated input 8 – Not Calibrated Uncalibrated channel 25 – No Module No Module Sensor Break Output Conf Off /On R/O Linearisation Types and Ranges Input Type Min Range Max Range Units PT100 100 ohm platinum bulb -200 850 o Linear Linear 50 450 ohms 7.6.3 R/O C Min Range Max Range Units -328 1562 o F Using RT4 as mA input Wire the input with a 2.49 ohm resistor as shown in 1.4.11. The PV is mapped from the input using User Cal – see 7.5.6 Approximate Values for 4-20mA input with 2.49 ohm resistor. PV range LoPoint LoOffset HiPoint HiOffset 4 to 20 35.4 -31.4 169.5 -149.5 0 to 100 35.4 -35.4 169.5 -69.5 For best accuracy the input should be calibrated against a reference. Resistor values up to 5 ohms may be used. 74 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 7.7 Engineering Handbook Analogue Output The AO4 offers 4 channels and the AO8 module 8 channels which maybe configured as mA outputs. An AO4 or AO8 may only be fitted in Slot 4. Folder – IO Sub-folder: Mod.25 to Mod.32 Name Parameter Description Value Ident Channel ident mAout IO Type mA Resolution To configure the output drive signal Display resolution Disp Hi Display high reading Disp Lo Display low reading Range Hi Electrical high input level Range Lo Electrical low input level Meas Value The current output value Default milli-amps dc XXXXX to Determines scaling for SCADA X.XXXX communications -99999 to 99999 decimal points depend on resolution 0 to 20 Conf Conf 100 Oper 0 Oper 20 Oper 4 Oper R/O PV Oper Status 7.7.1 Access Level R/O PV Status 0 - OK Normal operation The current status of the PV. 1 - Startup Initial startup mode 2 - SensorBreak Input in sensor break 4 – Out of range PV outside operating limits 6 - Saturated Saturated input 8 – Not Calibrated Uncalibrated channel 25 – No Module No Module R/O Example – 4 to 20mA Analogue Output In this example 0% (=Display Low) to 100% (=Display High) from a Loop PID Output is wired to this output channel PV input which will give a 4mA (=Range Low) to 20mA (=Range High) control signal. Here the PID demand is 50% giving a MeasuredVal output of 12mA. Part No HA028581 Issue 3 Sep-05 75 Engineering Handbook 7.8 Mini8 Controller Fixed IO There are two digital inputs, designated D1 and D2. Folder: IO Sub-folder: Fixed IO.D1 and .D2 Name Parameter Description Value Default Access Level Ident Channel Ident LogicIn LogicIn Read Only IO Type IO Type Input Input Read Invert Invert No/Yes – input sense is inverted No Conf Measured Val Measured Value On/Off Off Read Only Value seen at the terminals Only PV Process Variable On/Off Value after allowing for Invert Off Read Only There are two fixed relay outputs, designated A and B Folder: IO Sub-folder: Fixed IO.A and .B Name Parameter Description Value Default Access Level Ident Channel Ident Relay Relay Read Only IO Type IO Type OnOff OnOff Read Only Invert Invert No/Yes = output sense is inverted. No Conf Measured Val Measured Value On/Off Value seen at the terminals after allowing for Invert. Off Read Off PV Process Variable On/Off Requested output before Invert SbyAct Action taken by output when instrument goes into Standby Mode Off, On Switches On/Off Continue Remains in its last state 76 Part No HA028581 Only Oper Off Issue 3 Sep-05 Conf Mini8 Controller 7.9 Engineering Handbook Current Monitor The Mini8, with a CT3 card, has the capability of detecting failures of up to 16 heater loads by measuring the current flowing through them via 3 current transformer inputs. The failures that can be detected are: SSR Fault If current is detected flowing through the heater when the controller is requesting it to be off then this indicates that the SSR has a short circuit fault. If current is not detected when the controller is requesting the heater to be on it indicates that the SSR has an open circuit fault. Partial Load Fault (PLF) If less current is detected flowing through the heater than the PLF threshold, which has been set for that channel, then this indicates that the heater has a fault; in applications that use multiple heater elements in parallel then it indicates that one or more of the elements has an open circuit fault. Over Current Fault (OCF) If more current is detected flowing through the heater than the OCF threshold then this indicates that the heater has a fault; in applications that use multiple heater elements in parallel then it indicates that one or more of the elements has lower than expected resistance value. Heater failures are indicated via individual load status parameters and via four status words. In addition, a global alarm parameter will indicate when a new CT alarm has been detected, which, will also be registered in the alarm log. 7.9.1.1 Current Measurement Individual LoadCurrent parameters indicate the current measured for each heater. The Current Monitor function block utilises a cycling algorithm to measure the current flowing through one heater per measurement interval (default 10s, user alterable). Compensation within the control loop minimises the disturbance to the PV when current through a load is being measured. The interval between successive measurements is dependent upon the average output power required to maintain SP. The recommended absolute minimum interval can be calculated as follows: Minimum interval (s) > 0.25 * (100/average output power to maintain SP). For example, if average output power to maintain SP is 10%, using the above rule, the recommended minimum interval is 2.5 seconds. The interval may need to be adjusted depending upon the response of the heaters being used. Part No HA028581 Issue 3 Sep-05 77 Engineering Handbook Mini8 Controller 7.9.2 Single Phase Configurations 7.9.2.1 Single SSR triggering With this configuration, failures of individual heater loads can be detected. For example, if the current detected flowing through Heater 3 is less than its PLF threshold then this will be indicated as Load3PLF Example1 – Using one CT input L N CT1 H1 OP1 H2 OP2 H3 OP3 H4 OP4 H5 MINI8 OP5 All time proportioning outputs assigned to a single CT input H6 OP6 Note: Maximum of 6 Heaters can be connected to one CT input Example2 – Using three CT inputs L CT1 CT1 CT1 H1 OP1 H2 OP2 H3 OP3 H4 MINI8 OP4 This configuration also identifies individual heater failures H5 OP5 H6 OP6 78 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 7.9.2.2 Engineering Handbook Multiple SSR triggering With this configuration, failure of a set of heater loads can be detected. For example, if the current detected flowing through Heater Set 1 is less than Load1’s PLF threshold then this will be indicated as Load1PLF. Further investigation will then be required to determine which heater within Set 1 has failed. L N CT1 H1 OP1 H2 Heater Set 1 H3 H4 MINI8 OP2 H5 Heater Set 2 H6 7.9.2.3 Split Time Proportioning Outputs This is where a single power demand is split and applied to two time proportioning outputs, that have been scaled, allowing the loads to switch on incrementally as the output power increases. For example, Heater1 will deliver any demand from 0-50%, and Heater2 will deliver any demand from 50-100% (with Heater1 fully on). CurrentMonitor L CT1 Mod.17 H1 50 PV 0 Loop Pre-Scaling 0 100 Ch1Out Mod.18 100 H2 PV 50 MINI8 Pre-Scaling 0 100 As the Mini8 has the capability of detecting faults with up to 16 heater loads it can handle this type of application even if all 8 loops have split time proportioning outputs. Part No HA028581 Issue 3 Sep-05 79 Engineering Handbook 7.9.3 Mini8 Controller Three Phase Configuration Configuration for Three Phase supply applications is similar to that for Single phase using three CT inputs. Ph1 Ph2 Ph3 CT1 All currents passed through an individual CT must come from the same phase CT2 CT3 H1 OP1 H2 OP2 H3 OP3 MINI8 N/Ph2 OP4 OP5 OP6 Star with neutral or delta connection is possible H4 H5 N/Ph3 H6 N/Ph1 Note: Maximum of 6 Heaters can be connected to one CT input 80 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 7.9.4 Engineering Handbook Parameter Configuration If Current Monitor is enabled in the folder Instrument/Options/Current Monitor then the current monitor configuration folder appears as a subfolder in IO. Folder: IO Sub-folder: CurrentMonitor/Config Name Parameter Description Value Default Access Level Commission Commission CT No Oper CommissionStatus Commission Status No See Chapter 7.9.5 Auto Manual Accept Abort Not commissioned Not commissioned Commissioning in progress Commissioning There are no DO8/RL8 cards NoDO8orRL8cards installed in the instrument. The digital outputs are either not NoloopTPouts configured as time proportioning or are not wired from loop heater channels. Either a SSR short circuit or open SSRfault circuit fault is present. More than 6 heaters have been MaxLoadsCT1/2/3 connected to CT input 1or 2 or 3. Commissioning failed NotAccepted Successfully auto commissioned Passed Configured manually ManuallyConfigured 1s to 1m Interval Measurement Interval Inhibit Inhibit MaxLeakPh1 Max Leakage Current Phase 1 MaxLeakPh2 0 Read Only 10s Oper No – current is measured Yes –current measurement is inhibited 0.25 to 1 amp No Oper 0.25 Oper Max Leakage Current Phase 2 0.25 to 1 amp 0.25 Oper MaxLeakPh3 Max Leakage Current Phase 3 0.25 to 1 amp 0.25 Oper CT1Range* CT input 1 range 10 to 1000 amps (Ratio to 50mA) 10 Oper CT2Range* CT input 2 range 10 to 1000 amps (Ratio to 50mA) 10 Oper CT3Range* CT input 3 range 10 to 1000 amps (Ratio to 50mA) 10 Oper CalibrateCT1 Calibrate CT1 Idle Oper CalibrateCT2 Calibrate CT2 Idle See Chapter 7.6.6 0mA -70mA LoadFactorCal SaveUserCal As CT1 Idle Oper Calibrate CT3 As CT1 Idle Oper CalibrateCT3 • The current rating of the CT used for each of the CT input channels should cover only the single largest load current proposed for its group of heaters. e.g. if CT1 has heaters of 15A, 15A & 25A it would need a CT capable of at least 25A. Part No HA028581 Issue 3 Sep-05 81 Engineering Handbook 7.9.5 Commissioning 7.9.5.1 Auto Commission Mini8 Controller Auto commissioning of the Current Monitor is a feature that automatically detects which time proportioning outputs drive individual heaters (or heater sets), detects which CT input individual heaters are associated with and determines the Partial Load and Over Current thresholds using a 1:8 ratio. If auto commissioning fails, a status parameter indicates the reason why. Note: In order for the auto commissioning to operate successfully the process must be enabled for full operation of the heating circuit with the digital outputs configured as Time Proportioning and ‘soft’ wired to the appropriate loop heater channels. During auto commissioning digital outputs will switch on and off. .How to Auto Commission 1. Put instrument into Operator Mode. 2. Set Commission to Auto and CommissionStatus will display ‘Commissioning’. 3. If successful, CommissionStatus will display Passed and configured load parameters will become available. If unsuccessful, CommissionStatus displays the offending fault. If unsuccessful, CommissionStatus displays the offending fault: 82 NoDO8orRL8Cards Indicates that there are no DO8 or RL8 cards installed in the instrument. NoLoopTPOuts Indicates that the digital outputs are either not configured as time proportioning or are not wired from loop heater channels. SSRFault Indicates that either a SSR short circuit or open circuit fault is present. MaxLoadsCT1 Indicates that more than 6 heaters have been connected to CT input 1 (or 2,3) (or 2,3) Part No HA028581 Issue 3 Sep-05 Mini8 Controller 7.9.5.2 Engineering Handbook Manual Commission Manual Commissioning is also available and is intended for those users who want to commission the Current Monitor off-line or do not want to accept auto commissioned settings. How to Manual Commission 1. Set Commission to Manual. CommissionStatus will display Commissioning and Load1 configuration parameters will become available 2. Set Load1DrivenBy to the IO Module that is connected to the heater load. 3. Set Load1CTInput to the CT input number that is connected to the heater load. 4. Set Load1PLFthreshold and Load1OCFthreshold to appropriate values for the heater load. 5. Repeat for other loads. 6. To use the commissioned settings set Commission to ‘Accept’. CommissionStatus will display ManuallyConfigured. 7. To stop manual commissioning set Commission to ‘Abort’. CommissionStatus will display NotCommissioned. Part No HA028581 Issue 3 Sep-05 83 Engineering Handbook 7.9.6 Mini8 Controller Calibration A Mini8 supplied from factory with the CT3 card already installed the CT inputs will have been factory calibrated. If the CT3 card is installed at a later date then default calibration values are automatically loaded into the instrument. However, three calibration parameters, one for each CT input, are provided to allow the inputs to be calibrated in the field. Note: DC Current Source, capable of outputting a –70mA signal, is required to calibrate the inputs. The 3 CT inputs are calibrated individually. How to Calibrate 1. Apply the stimulus (0mA or –70mA) from the DC current source to the CT input to be calibrated. 2. Set CalibrateCT1, to reflect the stimulus being applied to the input. 3. CalibrateCT1 displays ‘Confirm’. Select ‘Go’ to proceed with the calibration process. 4. After selecting Go, CalibrateCT1 displays ‘Calibrating’. 5. If calibration was successful, CalibrateCT1 displays ‘Passed’. Select ‘Accept’ to keep the calibration values. 6. If calibration was unsuccessful, CalibrateCT1 displays ‘Failed’. Select ‘Abort’ to reject the calibration. 7. Select ‘SaveUserCal’ to save the calibration values into non-volatile memory. 8. Select ‘LoadFactCal’ to restore calibration values to the factory calibrated or default settings. 9. Note: It is possible to stop the calibration process at anytime by selecting ‘Abort’. Follow the same procedure for CT2 and CT3. 84 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 8. CHAPTER 8 ALARMS Alarms are used to alert the system when a pre-set level has been exceeded or a particular condition has changed state. As the Mini8 has no display to show alarms the alarm flags are all available over communications in status words See Alarm Summary (Section 8.7) . They may also be wired directly or via logic to an output such as a relay. Alarms can be divided into two main types. These are:Analogue alarms - operate by monitoring an analogue variable such as the process variable and comparing it with a set threshold. Digital alarms – operate when the state of a boolean variable changes, for example, sensor break. Number of Alarms - up to 32 analogue and 32 digital alarms may be configured. 8.1 Further Alarm Definitions Hysteresis is the difference between the point at which the alarm switches ‘ON’ and the point at which it switches ‘OFF’. It is used to provide a definite indication of the alarm condition and to prevent alarm relay chatter. Latch used to hold the alarm condition once an alarm has been detected. It may be configured as:None Non latching A non latching alarm will reset itself when the alarm condition is removed Auto Automatic An auto latching alarm requires acknowledgement before it is reset. The acknowledgement can occur BEFORE the condition causing the alarm is removed. Manual Manual The alarm continues to be active until both the alarm condition is removed AND the alarm is acknowledged. The acknowledgement can only occur AFTER the condition causing the alarm is removed. Event Event Alarm output will activate. Block The alarm may be masked during start up. Blocking prevents the alarm from being activated until the process has first achieved a safe state. It is used, for example, to ignore start up conditions which are not representative of running conditions. A blocking alarm is reinitiated after a setpoint change. Delay A short time can be set for each alarm which prevents the output from going into the alarm state. The alarm is still detected as soon as it occurs, but if it cancels before the end of the delay period then no output is triggered. The timer for the delay is then reset. It is also reset if an alarm is changed from being inhibited to uninhibited. Part No HA028581 Issue 3 Sep-05 85 Engineering Handbook 8.2 Mini8 Controller Analogue Alarms Analogue alarms operate on variables such as PV, output levels, etc. They can be soft wired to these variables to suit the process. 8.2.1 Analogue Alarm Types Absolute High - an alarm occurs when the PV exceeds a set high threshold. Absolute Low - an alarm occurs when the PV exceeds a set low threshold. Deviation High - an alarm occurs when the PV is higher than the setpoint by a set threshold Deviation Low - an alarm occurs when the PV is lower than the setpoint by a set threshold Deviation Band - an alarm occurs when the PV is higher or lower than the setpoint by a set threshold These are shown graphically below for changes in PV plotted against time. (Hysteresis set to zero) Alarm Type PV Abs High Process Variable (PV) Dev High Dev Bnd Setpoint (SP) Dev Low Abs Low Output State Abs Low Dev Low Time On On Dev High Dev Bnd Abs High 86 On On On On On On On Part No HA028581 Issue 3 Sep-05 Mini8 Controller 8.3 Engineering Handbook Digital Alarms Digital alarms operate on Boolean variables. They can be soft wired to any suitable Boolean parameter such as digital inputs or outputs. 8.3.1 Digital Alarm Types Pos Edge Neg Edge Edge High Low 8.4 The alarm will trigger when the input changes from a low to high condition The alarm will trigger when the input changes from a high to low condition The alarm will trigger on any change of state of the input signal The alarm will trigger when the input signal is high The alarm will trigger when the input signal is low Alarm Outputs Alarms can operate a specific output (usually a relay). Any individual alarm can operate an individual output or any combination of alarms can operate an individual output. They are wired as required in configuration level. Each source may be chosen from:Analogue Alarms 1 to 32 Digital Alarms 1 to 32 Any alarms New alarm/ New CT Alarm Loop break alarms 8.4.1 No OR Invert Output Yes How Alarms are Indicated Alarm states are all embedded in 16 bit status words. See Alarm Summary in Section 8.7 8.4.2 To Acknowledge an Alarm Set the appropriate alarm acknowledge flag to acknowledge that particular alarm. Alternatively the GlobalAck in the AlmSummary folder can be used to acknowledge ALL alarms that require acknowledging in the instrument. The action, which now takes place, will depend on the type of latching, which has been configured 8.4.2.1 Non Latched Alarms 8.4.2.2 If the alarm condition is present when the alarm is acknowledged, the alarm output will be continuously active. This state will continue for as long as the alarm condition remains. When the alarm condition clears the output will go off. If the alarm condition clears before it is acknowledged the alarm output goes off as soon as the condition disappears. Automatic Latched Alarms 8.4.2.3 The alarm continues to be active until both the alarm condition is removed AND the alarm is acknowledged. The acknowledgement can occur BEFORE the condition causing the alarm is removed. Manual Latched Alarms The alarm continues to be active until both the alarm condition is removed AND the alarm is acknowledged. The acknowledgement can only occur AFTER the condition causing the alarm is removed. 8.5 Alarm Parameters Four groups of eight analogue alarms are available. The following table shows the parameters to set up and configure alarms. Part No HA028581 Issue 3 Sep-05 87 Engineering Handbook Folder: Alarm Mini8 Controller Sub-folders: 1 to 32 Name Parameter Description Value Type Selects the type of alarm Conf In This is the parameter that will be monitored and compared against the threshold value to see if an alarm condition has occurred The reference value is used in deviation alarms and the threshold is measured from this reference and not from its absolute value. The threshold is the value that the input is compared against to determine if an alarm has occurred. The output indicates whether the alarm is on or off depending on: the alarm condition, latching and acknowledge, inhibiting and blocking. Inhibit is an input to the Alarm function. It allows the alarm to be switched OFF. Typically the Inhibit is connected to a digital input or event so that during a phase of the process alarms do not activate. For Example, if the door to a furnace is opened the alarms may be inhibited until the door is closed again. Hysteresis is used to prevent signal noise from causing the Alarm output to oscillate. Alarm outputs become active as soon as the PV exceeds the Alarm Setpoint. They return to inactive after the PV has returned to the safe region by more than the hysterisis value. Typically the Alarm hysterisis is set to a value that is greater than the oscillations seen on the instrument display Determine the type of latching the alarm will use, if any. Auto latching allows acknowledgement while the alarm condition is still active, whereas manual latching needs the condition to revert back to safe before the alarm can be acknowledged. See also the description at the beginning of this chapter Used in conjunction with the latching parameter. It is set when the user responds to an alarm. Alarm Blocking is used to prevent alarms from activating during start-up. In some applications, the measurement at start-up is in an alarm condition until the system has come under control. Blocking causes the alarms to be ignored until the system is under control (in the safe state), after this any deviations trigger the alarm This is a small delay between sensing the alarm condition and displaying it. If in the time between the two, the alarm goes safe, then no alarm is shown and the delay timer is reset. It can be used on systems that are prone to noise. Alarm not configured None Full Scale High Abs Hi Full Scale Low Abs Lo Deviation High Dev Hi Dev Lo Deviation Low Deviation band Dv Bnd Instrument range Instrument range Oper Instrument range Oper Off On Alarm output deactivated Alarm output activated R/O No Yes Alarm not inhibited Inhibit function active Oper Reference Threshold Out Inhibit Hysteresis Latch Ack Block Delay 88 Default Access Level Oper Instrument range Oper None Auto Manual Event No latching is used Automatic Manual Event Oper No Yes No Yes Not acknowledged Acknowledged No blocking Blocking Oper 0:00.0 to 500 mm:ss.s hh:mm:ss hhh:mm Part No HA028581 Oper 0:00.0 Issue 3 Sep-05 Oper Mini8 Controller 8.5.1 Engineering Handbook Example: To Configure Alarm 1 Change Access level to configuration. In this example the high alarm will be detected when the measured value exceeds 100.00. The current measured value is 27.79 as measured by the ‘Input’ parameter. This parameter will normally be wired to an internal source such as a thermocouple input. In this example the alarm will set when the measured value exceeds the threshold 100.0 and will clear when the input decreases 0.50 units below the threshold level (i.e. at 99.5 units). Part No HA028581 Issue 3 Sep-05 89 Engineering Handbook 8.6 Mini8 Controller Digital Alarm Parameters Four groups of eight digital alarms are available. The following table shows the parameters to set up and configure alarms. Folder: DigAlarm Sub-folders: 1 to 32 Name Parameter Description Value Type Selects the type of alarm In This is the parameter that will be monitored and checked according to the AlarmType to see if an alarm condition has occurred The output indicates whether the alarm is on or off depending on: the alarm condition, latching and acknowledge, inhibiting and blocking. Inhibit is an input to the Alarm function. It allows the alarm to be switched OFF. Typically the Inhibit is connected to a digital input or event so that during a phase of the process alarms do not activate. For Example, if the door to a furnace is opened the alarms may be inhibited until the door is closed again. Determine the type of latching the alarm will use, if any. Auto latching allows acknowledgement while the alarm condition is still active, whereas manual latching needs the condition to revert back to safe before the alarm can be acknowledged. See also the description at the beginning of this chapter Used in conjunction with the latching parameter. It is set when the user responds to an alarm. Alarm Blocking is used to prevent alarms from activating during start-up. In some applications, the measurement at start-up is in an alarm condition until the system has come under control. Blocking causes the alarms to be ignored until the system is under control (in the safe state), after this any deviations trigger the alarm This is a small delay between sensing the alarm condition and displaying it. If in the time between the two, the alarm goes safe, then no alarm is shown and the delay timer is reset. It can be used on systems that are prone to noise. None PosEdge NegEdge Edge High Low 0 to 1 Out Inhibit Latch Ack Block Delay 8.6.1 Default Conf Alarm not configured On rising edge On falling edge On change High (1) Low (0) Oper Off On Alarm output deactivated Alarm output activated R/O No Yes Alarm not inhibited Inhibit function active Oper None Auto Manual Event No latching is used Automatic Manual Event Oper No Yes No Yes Not acknowledged Acknowledged No blocking Blocking Oper Oper 0:00.0 0:00.0 to 500 mm:ss.s hh:mm:ss hhh:mm Example: To Configure DigAlarm 1 Change Access level to configuration. In this example the digital alarm will come on if Timer 1 expires. Timer.1.Out is wired to the alarm input. The DigAlarm.1.Out will turn on if the timer expires. 90 Access Level Part No HA028581 Issue 3 Sep-05 Oper Mini8 Controller 8.7 Engineering Handbook Alarm Summary This is a summary of all the alarms in the Mini8. It provides global alarm and acknowledge flags as well as 16 bit status words which can be read over communications by the supervisory system. Folder: AlmSummary Sub-folders: General Name Parameter Description Value NewAlarm Off/On AnAlarmStatus1 A new alarm has occurred since the last reset (excludes CT alarms) Resets the NewAlarm flag A new Current alarm has occurred since the last reset Resets the NewCTAlarm flag Any new alarm since the last reset Acknowledges every alarm in the Mini8 requiring acknowledgement. Also resets NewAlarm and NewCTAlarm flags. 16 bit word for analogue alarms 1 to 8 AnAlarmStatus2 AnAlarmStatus3 AnAlarmStatus4 16 bit word for analogue alarms 9 to 16 16 bit word for analogue alarms 17 to 24 16 bit word for analogue alarms 25 to 32 RstNewAlarm NewCTAlarm RstNewCTAlarm AnyAlarm GlobalAck Part No HA028581 Issue 3 Sep-05 Default Access Level R/O Yes / No Off/On No Oper R/O Yes / No Off/On No Yes No Oper R/O Oper Not acknowledged Acknowledged Alarm 1 active Bit 0 Alarm 1 not ack’d Bit 1 Alarm 2 active Bit 2 Alarm 2 not ack’d Bit 3 Alarm 3 active Bit 4 Alarm 3 not ack’d Bit 5 Alarm 4 active Bit 6 Alarm 4 not ack’d Bit 7 Alarm 5 active Bit 8 Alarm 5 not ack’d Bit 9 Alarm 6 active Bit 10 Alarm 6 not ack’d Bit 11 Alarm 7 active Bit 12 Alarm 7 not ack’d Bit 13 Alarm 8 active Bit 14 Alarm 8 not ack’d Bit 15 Same format as above Same format as above Same format as above R/O R/O R/O R/O 91 Engineering Handbook Mini8 Controller Folder: AlmSummary Sub-folders: General Name Parameter Description Value DigAlarmStatus1 16 bit word for digital alarms 1 to 8 DigAlarmStatus2 DigAlarmStatus3 DigAlarmStatus4 SBrkAlarmStatus1 16 bit word for digital alarms 9 to 16 16 bit word for digital alarms 17 to 24 16 bit word for digital alarms 25 to 32 16 bit word for IO channels Mod.1 to 8 SbrkAlarmStatus2 SbrkAlarmStatus3 SbrkAlarmStatus4 CTAlarmStatus1 16 bit word for IO channels Mod.9 to 16 16 bit word for IO channels Mod.17 to 24 16 bit word for IO channels Mod.25 to 32 16 bit word for CT alarms 1 to 5 Alarm 1 active Bit 0 Alarm 1 not ack’d Bit 1 Alarm 2 active Bit 2 Alarm 2 not ack’d Bit 3 Alarm 3 active Bit 4 Alarm 3 not ack’d Bit 5 Alarm 4 active Bit 6 Alarm 4 not ack’d Bit 7 Alarm 5 active Bit 8 Alarm 5 not ack’d Bit 9 Alarm 6 active Bit 10 Alarm 6 not ack’d Bit 11 Alarm 7 active Bit 12 Alarm 7 not ack’d Bit 13 Alarm 8 active Bit 14 Alarm 8 not ack’d Bit 15 Same format as above Same format as above Same format as above Mod.1 fault Bit 0 Alarm 1 not ack’d Bit 1 Mod.2 fault Bit 2 Alarm 2 not ack’d Bit 3 Mod.3 fault Bit 4 Alarm 3 not ack’d Bit 5 Mod.4 fault Bit 6 Alarm 4 not ack’d Bit 7 Mod.5 fault Bit 8 Alarm 5 not ack’d Bit 9 Mod.6 fault Bit 10 Alarm 6 not ack’d Bit 11 Mod.7 fault Bit 12 Alarm 7 not ack’d Bit 13 Mod.8 fault Bit 14 Alarm 8 not ack’d Bit 15 Same format as above Same format as above Same format as above Load1 SSR fail Bit 0 Load1 PLF Bit 1 Load1 OCF Bit 2 Load2 SSR fail Bit 3 Load2 PLF Bit 4 Load2 OCF Bit 5 Load3 SSR fail Bit 6 Load3 PLF Bit 7 Load3 OCF Bit 8 Load4 SSR fail Bit 9 Load4 PLF Bit 10 Load4 OCF Bit 11 Load5 SSR fail Bit 12 Load5 PLF Bit 13 Load5 OCF Bit 14 Bit 15 92 Default Part No HA028581 Access Level R/O R/O R/O R/O R/O R/O R/O R/O R/O Issue 3 Sep-05 Mini8 Controller Engineering Handbook Folder: AlmSummary Sub-folders: General Name Parameter Description Value CTAlarmStatus2 16 bit word for CT alarms 6 to 10 CTAlarmStatus3 CTAlarmStatus4 16 bit word for CT alarms 11 to 15 16 bit word for CT alarm 16 Load6 SSR fail Bit 0 Load6 PLF Bit 1 Load6 OCF Bit 2 Load7 SSR fail Bit 3 Load7 PLF Bit 4 Load7 OCF Bit 5 Load8 SSR fail Bit 6 Load8 PLF Bit 7 Load8 OCF Bit 8 Load9 SSR fail Bit 9 Load9 PLF Bit 10 Load9 OCF Bit 11 Load10 SSR fail Bit 12 Load10 PLF Bit 13 Load10 OCF Bit 14 Bit 15 Same format as CTAlarmStatus1 Same format as CTAlarmStatus1 8.8 Default Access Level R/O R/O R/O Alarm Log A list of the last 32 alarms to have occurred is maintained in an Alarm Log. Folder: AlmSummary Sub-folder: AlmLog Name Parameter Description Value Default Access Level ClearLog Entry1Ident Clear Alarm Log Most recent alarm activation No NoEntry Oper R/O Entry1Day Entry1Time Entry2Ident The day the first entry activated The time the first entry activated 2nd most recent alarm activation NoEntry 0 NoEntry R/O R/O R/O Entry2Day Entry2Time …etc Entry32Ident The day the second entry activated The time the second entry activated Yes/No All analogue alarms All digital alarms All sensor break alarms All current alarms NoEntry, Monday/Tuesday…Sunday. hh:mm:ss All analogue alarms All digital alarms All sensor break alarms All current alarms NoEntry, Monday/Tuesday…Sunday. hh:mm:ss NoEntry 0 R/O R/O NoEntry R/O Entry32Day Entry32Time The day the 32nd entry activated The time the 32nd entry activated NoEntry 0 R/O R/O 32nd most recent alarm activation All analogue alarms All digital alarms All sensor break alarms All current alarms NoEntry, Monday/Tuesday…Sunday. hh:mm:ss Note that EntryDay and EntryTime parameters require the Real Time Clock to be set up (Section 11.4) to record meaningful values. Part No HA028581 Issue 3 Sep-05 93 Engineering Handbook Mini8 Controller 9. CHAPTER 9 BCD INPUT The Binary Coded Decimal (BCD) input function block uses a number of digital inputs and combines them to make a numeric value. A very common use for this feature is to select a setpoint program number from panel mounted BCD decade switches. The block uses 4 bits to generate a single digit. Two groups of four bits are used to generate a two digit value (0 to 99) The block outputs four results 1. Units Value: The BCD value taken from the first four bits (range 0 – 9) 2. Tens Value: The BCD value taken from the second four bits (range 0 – 9) 3. BCD Value: The combined BCD value taken from all 8 bits (range 0 – 99) 4. Decimal Value: The decimal numeric equivalent of Hexadecimal bits (range 0 – 255) The following table shows how the input bits combine to make the output values. Input 1 Input 2 Input 3 Input 4 Input 5 Input 6 Input 7 Input 8 Units value ( 0 – 9) BCD value (0 – 99) Decimal value (0 – 255) Tens value ( 0 – 9) Since the inputs cannot all be guaranteed to change simultaneously, the output will only update after all the inputs have been stable for two samples. 9.1 BCD Parameters Folder – BCDInput Sub-Folders: 1 and 2 Name Parameter Description Value In 1 Digital Input 1 On or Off In 2 Digital Input 2 On or Off In 3 Digital Input 3 In 4 Default Access Level Off Oper Off Oper On or Off Off Oper Digital Input 4 On or Off Off Oper In 5 Digital Input 5 On or Off Off Oper In 6 Digital Input 6 On or Off Off Oper In 7 Digital Input 7 On or Off Off Oper In 8 Digital Input 8 On or Off Off Oper Dec Value Decimal value of the inputs 0 – 255 See examples below BCD Value Reads the value (in BCD) of the switch as it appears on the digital inputs 0 – 99 See examples below Units Units value of the first switch 0–9 See examples below R/O Tens Units value of the second switch 0–9 See examples below R/O 94 Alterable from the operator interface if not wired Part No HA028581 R/O Issue 3 Sep-05 Mini8 Controller In 1 1 1 0 1 9.1.1 Engineering Handbook In 2 0 1 0 1 In 3 0 1 0 1 In 4 0 1 0 1 In 5 0 0 1 1 In 6 0 0 1 1 In 7 0 0 1 1 In 8 0 0 1 1 Dec 1 15 240 255 BCD 1 9 90 99 Units 1 9 0 9 Tens 0 0 9 9 Example: To wire a BCD Input The BCD digital input parameters may be wired to digital input terminals of the controller. a DI8 module may be used and there are also two standard digital input terminals in FixedIO, D1 and D2. This example shows a BCD switch selecting one of eight values, In1 to In8 on the Mux8. Part No HA028581 Issue 3 Sep-05 95 Engineering Handbook 10. Mini8 Controller CHAPTER 10 DIGITAL COMMUNICATIONS Digital Communications (or ‘comms’ for short) allows the Mini8 to be part of a system by communicating with a PC or a programmable logic controller (PLC). The Mini8 also has a configuration port for ‘cloning’ or saving/loading instrument configurations for future expansion of the plant or to allow you to recover a system after a fault. 10.1 Configuration Port The configuration port is on an RJ11 socket, just to the right of the power supply connections. This will normally be connected to a personal computer running iTools. Eurotherm supply a standard cable to connect a serial COM port on a computer to the RJ11 socket, part no. SubMini8/cable/config. This port conforms to MODBUS RTU ® protocol a full description of which can be found on www.modbus.org. 9 pin DF to PC COM port (RS232) RJ11 Function Pin - 6 N/c 3 (Tx) 5 Rx 2 (Rx) 4 Tx 5 (0v) 3 0v (gnd) 2 N/c 1 Reserved Pin 6 Pin 1 10.1.1 Configuration Communications Parameters Folder - Comms Sub-folders: CC (Config Comms) Name Parameter Description Value Default Access Level Ident Identification of the module fitted. Modbus always. Modbus R/O Protocol Digital communications protocol MODBUS MODBUS R/O Baud Communications baud rate 4800 19200 Conf None Conf 1 Oper No Conf non-iso 9600 19k2 (19200) Parity Communications parity Address Instrument address Wait Rx/tx wait states 96 None No parity Even Even parity Odd Odd parity 1 to 254 No No delay Yes Fixed delay. This inserts a delay between Rx and Tx to ensure that the drivers used by intelligent RS232/RS485 converters have sufficient time to switch over. Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook When connecting to iTools the instrument on this port will be found at address 255. iTools will also optimise the baud rate to suit the conditions. This port can be used as a ‘permanent’ connection but it is limited to one instrument, it is a RS232 point to point connection. Configuration is also possible through the Field Communications port but ONLY if that port is Modbus or ModbusTCP. In that situation the Mini8s can be multi-dropped to iTools. 10.2 Field Communications Port The Min8 controller has a number of communication options. These have to be ordered from the factory as part of the instrument build. A change of protocol is not usually possible in the field. The physical port and the connections will vary depending on the field communications protocol. Mini8 version 1.xx offers Modbus and DeviceNet, Version 2.xx adds CANopen, Profibus and Ethernet Modbus-TCP. 10.3 Modbus This port conforms to MODBUS RTU ® protocol a full description of which can be found on www.modbus.org. 10.3.1 Modbus Connections This uses two parallel RJ45 connectors for use with screened Cat5e patch cables. The connection is usually 2 wire but 4 wire is also available. This is selected by the top switch of the address switches below the RJ45 ports – OFF (to the left) 2 wire, ON (to the right) 4 wire. RJ45 pin 3 wire 5 wire 8 A RxA 7 B RxB 6 Ground Ground 3 Ground Ground 2 A TxA 1 B TxB Pin 8 5 4 Part No HA028581 Issue 3 Sep-05 Pin 1 97 Engineering Handbook Mini8 Controller 10.3.2 Communications Parameters The following table shows the parameters available. Folder – Comms Sub-folder: FC (Field Communications Name Parameter Description Value Default Access Level Ident Comms Module Identity Modbus R/O Protocol Digital communications protocol MODBUS Conf Baud Communications baud rate Communications parity 9600 125k 125k None Conf Parity Address Instrument address 1 Oper Network Status Network Status Wait Rx/tx delay time Broadcast Enabled Broadcast Address To enable broadcast master communications. (See 10.4) Address of the parameter being written to slaves. Modbus / DeviceNet/CANopen/Profibus/ Ethernet MODBUS / DeviceNet/CANopen/Profibus/ Ethernet Modbus: 4800, 9600 or 19k2 (19200) DeviceNet: 125k, 250k, or 500k CANopen: 125k, 250k, 500k, or 1M None No parity Even Even parity Odd Odd parity 1 to 254 Only writable if DIP switches are set to 0. For Profibus,CANopen and DeviceNet only. Displays status of the network and connection No No delay Yes Fixed delay. This inserts a delay between Rx and Tx to ensure that the drivers used by intelligent RS232/RS485 converters have sufficient time to switch over. No Not enabled Yes Enabled 0 to See Appendix A for addresses of all 32767 Mini8 parameters. Conf R/O No Conf No ! Broadcast Value Value to be sent to instruments on the network. This would normally be wired to a parameter within the master Range of the parameter wired. In the case of a Boolean the value will be 0 or 1. 10.3.3 Communications Identity The instrument recognizes the type of communication board fitted. The identity ‘Ident’ is displayed to show that the instrument is built as required. 98 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 10.3.4 Modbus Address Switch On a network of instruments an address is used to specify a particular instrument. Each instrument on a network MUST have a unique address. Address 255 is reserved for configuration using the configuration port or the configuration clip The switch is situated at the bottom of the Comms module. The switch gives addresses from 1 to 31. If Address 0 is set the Mini8 will then take the address and parity settings entered in the configuration of the instrument, see folder above. This allows for addresses above 31. S w 8 7 6 5 4 3 2 1 OFF ON 3 wire NO Parity Even - 4 wire Parity Odd Address 16 Address 8 Address 4 Address 2 Address 1 8 Example shows 4 wire and address 1 1 OFF ↔ ON 10.3.5 Baud Rate The baud rate of a communications network specifies the speed that data is transferred between instrument and master. A baud rate of 9600 equates to 9600 Bits per second. Since a single character requires 8 bits of data plus start, stop, and optional parity, up to 11 bits per byte may be transmitted. 9600 baud equates approximately to 1000 Bytes per second. 4800 baud is half the speed – approx. 500 Bytes per second. In calculating the speed of communications in your system it is often the Latency between a message being sent and a reply being started that dominates the speed of the network. For example, if a message consists of 10 characters (10msec at 9600 Baud) and the reply consists of 10 characters, then the transmission time would be 20 msec. However, if the Latency is 20msec, then the transmission time has become 40msec. 10.3.6 Parity Parity is a method of ensuring that the data transferred between devices has not been corrupted. Parity is the lowest form of integrity in the message. It ensures that a single byte contains either an even or an odd number of ones or zero in the data. In industrial protocols, there are usually layers of checking to ensure that the first byte transmitted is good. Modbus applies a CRC (Cyclic Redundancy Check) to the data to ensure that the package is correct. 10.3.7 RX/TX Delay Time In some systems it is necessary to introduce a delay between the instrument receiving a message and its reply. This is sometimes caused by communications converter boxes which require a period of silence on the transmission to switch over the direction of their drivers. Part No HA028581 Issue 3 Sep-05 99 Engineering Handbook Mini8 Controller 10.4 Modbus Broadcast Master Communications Broadcast master communications allow the Mini8 controllers to send a single value to any slave instruments using a Modbus broadcast using function code 6 (Write single value). This allows the Mini8 to link through digital communications with other products without the need for a supervisory PC to create a small system solution. Example applications include multi-zone profiling applications or cascade control using a second controller. The facility provides a simple and precise alternative to analogue retransmission. ! Warning When using broadcast master communications, be aware that updated values are sent many times a second. Before using this facility, check that the instrument to which you wish to send values can accept continuous writes. Note that in common with many third party lower cost units, the Eurotherm 2200 series and the 3200 series prior to version V1.10 do not accept continuous writes to the temperature setpoint. Damage to the internal non-volatile memory could result from the use of this function. If in any doubt, contact the manufacturer of the device in question for advice. When using the 3200 series fitted software version 1.10 and greater, use the Remote Setpoint variable at Modbus address 26 if you need to write to a temperature setpoint. This has no write restrictions and may also have a local trim value applied. There is no restriction on writing to the 2400, 3500 or Mini8 series. 10.4.1 Mini8 Broadcast Master The Mini8 broadcast master can be connected to up to 31 slaves if no segment repeaters are used. If repeaters are used to provide additional segments, 32 slaves are permitted in each new segment. The master is configured by selecting a Modbus register address to which a value is to be sent. The value to send is selected by wiring it to the Broadcast Value. Once the function has been enabled, the instrument will send this value out over the communications link every control cycle typically every 110ms. Notes:1. The parameter being broadcast must be set to the same decimal point resolution in both master and slave instruments. 2. If iTools, or any other Modbus master, is connected to the port on which the broadcast master is enabled, then the broadcast is temporarily inhibited. It will restart approximately 30 seconds after iTools is removed. This is to allow reconfiguration of the instrument using iTools even when broadcast master communications is operating. A typical example might be a multi zone application where the setpoint of each zone is required to follow, with digital accuracy, the setpoint of a master. Master Min8 1 Mini8 2 Mini8 31 Figure 10-1: Broadcast Comms 100 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 10.4.2 Wiring Connections The Digital Communications module for the master must be the Field Comms and is only RS485/RS422. RS232 is not available. The Digital Communications module for the slave can be the Config port (RS232 only) or the Field Comms port (Not RS232).. Standard patch cables cannot be used, as the connections do not ‘cross over.’ Wire using twisted pair(s) cable and crimp on the appropriate RJ45 or RJ11 plug. RS485 2-wire Connect A (+) in the master to A (+) of the slave Connect B (-) in the master to B (-) of the slave This is shown diagrammatically below Mini8 Master RS485 A (+) A (+) B (-) B (-) Com Com Slave 1 RS485 Figure 10-2: Rx/Tx Connections RS485 2-wire RS422, RS485 4-wire Rx connections in the master are wired to Tx connections of the slave Tx connections in the master are wired to Rx connections of the slave Mini8 Master RS422 RS485 4-wire Tx+ Tx+ Tx- Tx- Rx+ Rx+ Rx- Rx- Com Com Slave 1 RS422 RS485 4-wire Figure 10-3: Rx/Tx Connections for RS422, RS485 4-wire Part No HA028581 Issue 3 Sep-05 101 Engineering Handbook Mini8 Controller 10.5 DeviceNet Only 2 parameters have to be set on the Mini8 for use with DeviceNet, baud rate and address. Both can be set on the hardware address switch situated under the DeviceNet connector. Each Mini8 must have a unique address on the DeviceNet network and all units must be set to the same Baud rate. The switch gives addresses from 0 to 63. S w 8 7 6 5 4 3 2 1 OFF ON Baud rate Baud rate - Baud rate Baud rate Address 32 Address 16 Address 8 Address 4 Address 2 Address 1 S w Baud rate 125k 250k 500k 8 7 OFF OFF ON OFF OFF ON 8 Example shows 500k baud rate and address 5 1 OFF ↔ ON Use 500k unless the total length of the DeviceNet network is longer than 100m. In iTools the DeviceNet Network Status is available and will return the following status: Offline: Ready: Running: 102 No DeviceNet traffic detected DeviceNet traffic detected but not for this address DeviceNet traffic detected addressing this instrument. Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 10.6 CANopen 10.6.1 Instrument setup Up to 127 Nodes can be connected to a standard CANopen Network, for nodes 1 – 31 the address can be set via the comms DIP switches. For nodes 32 – 127 the address switches must be set to OFF making the Address parameter alterable in the Config Comms List, which then can be used to set the Node address. S w 8 7 6 5 4 3 2 1 OFF ON Baud rate Baud rate - Baud rate Baud rate Address 32 Address 16 Address 8 Address 4 Address 2 Address 1 S w Baud rate 125k 250k 500k 1M 8 7 OFF OFF ON OFF ON ON OFF ON 8 Example shows 1M baud rate and address 4 1 OFF ↔ ON A standard CANopen Network is designed to work at data transfer rates of up to 1Mbits/s (depending upon bus length). Four baud rate settings are set on the comms DIP switches: 125K, 250K, 500K and 1M. 10.6.2 Mini8 CANopen Features The main features of the Mini8 CANopen Slave Interface are: • • • • • • • • CANopen-to-Modbus Gateway Generic Device 4 Receive PDOs (dynamic) 4 Transmit PDOs (dynamic) PDO communication and mapping object values can be stored in non-volatile memory 1 Server SDO 200 Parameter Pick List (re-definable) PDO Mappings cloneable via CommsTab function block CANopen is a higher layer object based CAN network protocol that supports direct access to device parameters, transmission of time critical process data and network management diagnostics via a standardised object dictionary. The generic CANopen model shows that the device (Node) is connected to a CAN network on one side and application specific I/O data on the other. Part No HA028581 Issue 3 Sep-05 103 Engineering Handbook Mini8 Controller 10.6.3 Communication Interface CANopen is based on communication profiles, which specifies the basic communication mechanisms (PDOs, SDOs and NMT messages) and an object directory that specifies device parameters and functions. 10.6.3.1 Object Dictionary The object dictionary is divided into a section containing general device information (device identification, manufacturer name etc), communication parameters, and a section that describes the specific device data/functionality whether by a device profile (part of CANopen specifications) or manufacturer specified. Index Description 0000h 0001h – 025Fh 0260h – 0FFFh 1000h – 1FFFh 1200h – 127Fh 1280h – 12FFh 1300h – 13FFh 1400h – 15FFh 1600h – 17FFh 1800h – 19FFh 1A00h – 1BFFh 1C00h – 1FFFh 2000h – 5FFFh 6000h – 9FFFh A000h - BFFFh C000h - FFFFh Reserved Data Type Definitions Reserved General communication parameters Communication parameters for server SDOs Communication parameters for client SDOs Reserved Communication parameters for receive PDOs Mapping parameter for receive PDOs Communication parameters for transmit PDOs Mapping parameter for transmit PDOs Reserved for extensions (i.e. DSP-302) Manufacturer Specific Profile objects Standardised Device Profiles Interface profile specific objects Reserved Range Data Types Communication Profile Application Objects Interface Profile 10.6.3.2 Process Data Objects (PDOs) The transfer of process data between devices on a network is the main purpose of a CAN-based communication system. In CANopen, this is performed by PDOs, which map process data from an application object(s) (similar to DeviceNet Class 0x64) into communication objects (similar to DeviceNet Class 0x66). PDOs are separated into two groups, Transmit PDOs and Receive PDOs. Each PDO message is capable of containing 8 bytes of data (four 16-bit scaled integer parameters). Transmit PDOs are typically used to transmit critical instrument data to other nodes on the network, for example, alarm status’. Receive PDOs are typically used to configure instrument settings, for example, TargetSP. For the Mini8 the number of PDOs is limited to 4 transmit PDOs and 4 receive PDOs, giving a maximum of 16 transmit and 16 receive scaled integer parameters. Note Transmit PDO = transmitted from the Mini8 (READ), Receive PDO = received by Mini8 (WRITE). 10.6.3.3 Service Data Objects (SDOs) To access entries in the Object dictionary CANopen uses SDOs, peer to peer communication channels (similar to explicit messaging in DeviceNet), generally used during system configuration or to request non-critical process data. This gives access to Network Management, Device & Manufacturer Information, Error Messages, Reconfiguration and control of PDOs, Store & restore of configuration, Heartbeat & Node Guarding, 104 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 10.6.4 Network Management (NMT) CANopen slave nodes include the following state machine, which allows the slaves to be in different operating states. Initialisation Boot Up FC LED: Off Pre-operational SDO communications Emergency Heartbeat/Node Guard Sync FC LED: blinking Stopped Heartbeat/Node Guard Operational FC LED: Off PDO communications SDO communications Heartbeat/NG Emergency Sync FC LED: On Transitions between some states are made automatically by the slaves themselves, whereas others can only be made upon receiving the corresponding NMT Master message. Upon power-up the slave node comes out of the Power-On Reset state and goes into initialisation. It then initialises the application and communication interface. It then attempts to transmit a boot-up message. When the boot-up message has been successfully transmitted the node enters the Pre-Operational state where it is possible for the network master to configure individual nodes via SDO messages. The master can then switch individual nodes or all nodes to the Operational state (allowing PDO communications i.e. the running state) or the Stopped state. Part No HA028581 Issue 3 Sep-05 105 Engineering Handbook Mini8 Controller 10.6.4.1 Heartbeat & Node Guarding The Mini8 interface supports both Node Guarding and the Heartbeat Protocol. With Node Guarding it is the responsibility of a Master device to guard (poll) all connected slaves for their current NMT state. With the Heartbeat method, each slave device transmits a heartbeat (a 1-byte message containing the current NMT state) periodically. The Heartbeat protocol is the most widely used. 10.6.4.2 Emergencies (EMCY) Each CANopen slave device is assigned an emergency message. If the slave device has recognised that a fault/error exists it transmits an emergency message to inform the network of the problem. 10.6.5 Device Profile DS-404 DS-404 is the Device Profile for Measuring Devices and Closed Loop Controllers. It specifies in which object each Input, Output, Alarm and Control parameters for each channel should reside. DS-404 is not considered appropriate for the Mini8 instrument due to its inherent modular and versatile architecture which allows different alarms, IO etc to be associated with different channels. The Mini8 is classed as a Generic Device as its CANopen application objects have been specified by Eurotherm using the range from 2000h. 10.6.6 Default PDOs Transmit PDOs are typically used to transmit critical instrument data to other nodes on the network, for example, alarm status’. Receive PDOs are typically used to configure instrument settings, for example, TargetSP. The Mini8 PDOs are preconfigured with a standard set of parameters. PDO blocks may be Enabled or Disabled via SDO communications. In the Mini8 the transmit PDOs can also be set to transmit cyclically, or on change of state, or both. The parameters in the PDO blocks may be replaced by other ones if required. There are 2 methods to achieve this: - using Commstab blocks to redirect the CANopen object to a different Modbus parameter. This has the advantage that an instrument clone will behave in the same way as the original. - using CANopen communications to reconfigure the PDO block. Both of these methods will be described. 10.6.6.1 Letter Boxing The number of PDOs is limited to 4 transmit PDOs and 4 receive PDOs, giving a maximum of 16 transmit and 16 receive scaled integer parameters. This is very restrictive for the Mini8, which has up to 16 loops, therefore, some loop parameters are ‘letter boxed’ whereby the user can specify to which loop the data is intended. For example in Transmit PD03 if the parameter ‘Loop Number’ has the value 0 then the PV, TargetSP and ActiveOut are all from Loop 1. This will cycle around all enabled loops at a rate set in the Mini8 parameter Comms.FC.TxPDO3InstTime. If this time is zero then the CANopen master may write a value to the Loop Number parameter to get whichever Loop PV, TargetSP and ActiveOut it requires. 106 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 10.6.6.2 Transmit PDO1 This contains the Analogue Alarm Status words. As default it is Enabled and configured to transmit when any of the status word values change. Object Index Sub Index Parameter Data Type 1A00h 00h 01h 02h 03h 04h Number of Supported Entries [4] AlmSummary.AnAlarmStatus1 AlmSummary.AnAlarmStatus2 AlmSummary.AnAlarmStatus3 AlmSummary.AnAlarmStatus4 Unsigned8 Integer16 Integer16 Integer16 Integer16 10.6.6.3 Transmit PDO2 This contains the Sensor Break Alarm Status words. As default it is Enabled and configured to transmit when any of the status word values change. Object Index Sub Index Parameter Data Type 1A01h 00h 01h 02h 03h 04h Number of Supported Entries [4] AlmSummary.SBrkAlarmStatus1 AlmSummary.SBrkAlarmStatus2 AlmSummary.SBrkAlarmStatus3 AlmSummary.SBrkAlarmStatus4 Unsigned8 Integer16 Integer16 Integer16 Integer16 10.6.6.4 Transmit PDO3 This contains Loop.n operational data. As default it is Enabled and configured to transmit cyclically. The Loop Number will be cycled round the enabled loops with the time between each change in the loop number being set by Comms.FC.TxPDO3InstTime. If this time is set to ‘0’ then the loop number will not be cycled, instead the user sets the loop number via SDO communications. Object Index 1A02h Sub Index 00h 01h 02h 03h 04h Parameter Data Type Number of Supported Entries [4] Loop Number [0….15 corresponding to n=1….16] Loop.n.Main.PV Loop.n.Main.WorkingSP Loop.n.Main.ActiveOut Unsigned8 Integer16 Integer16 Integer16 Integer16 10.6.6.5 Transmit PDO4 This contains Programmer.n operational data. As default it is Enabled and configured to transmit cyclically. The Programmer Number will be cycled round the enabled programmers with the time between each change in programmer number being set by Comms.FC.TxPDO4InstTime. If this time is set to ‘0’ then the programmer number will not be cycled, instead the user sets the programmer number via SDO communications. Object Index Sub Index Parameter Data Type 1A03h 00h 01h 02h 03h 04h Number of Supported Entries [4] Programmer Number [0.…7 corresponding to n=1….8] Programmer.n.Run.CurProg Programmer.n.Run.ProgStatus Programmer.n.Run.ProgTimeLeft Unsigned8 Integer16 Integer16 Integer16 Integer16 Part No HA028581 Issue 3 Sep-05 107 Engineering Handbook Mini8 Controller 10.6.6.6 Receive PDO1 This contains control loop Operational parameters, the loop number must be specified in order for the Mini8 to set the correct loop instance parameters. Object Index 1600h Sub Index 00h 01h 02h 03h 04h Parameter Data Type Number of Supported Entries [4] Loop Number [0.…15 corresponding to n=1….16] Loop.n.Main.TargetSP Loop.n.Main.AutoMan Loop.n.OP.ManualOutVal Unsigned8 Integer16 Integer16 Integer16 Integer16 10.6.6.7 Receive PDO2 This contains control loop PID parameters, the loop number must be specified in order for the Mini8 to set the correct loop instance parameters. Object Index Sub Index Parameter Data Type 1601h 00h 01h 02h 03h 04h Number of Supported Entries [4] Loop Number [0.…15 corresponding to n=1….16] Loop.n.PID.ProportionalBand Loop.n.PID.IntegralTime Loop.n.PID.DerivativeTime Unsigned8 Integer16 Integer16 Integer16 Integer16 10.6.6.8 Receive PDO3 This will contain control loop SP parameters, the loop number must be specified in order for the Mini8 to set the correct loop instance parameters. Object Index Sub Index Parameter Data Type 1602h 00h 01h 02h 03h 04h Number of Supported Entries [4] Loop Number [0.…15 corresponding to n=1….16] Loop.n.SP.SP1 Loop.n.SP.SP2 Loop.n.SP.SPSelect Unsigned8 Integer16 Integer16 Integer16 Integer16 10.6.6.9 Receive PDO4 This contains Programmer Operational parameters, the programmer number must be specified in order for the Mini8 to set the correct programmer instance parameters. Object Index Sub Index Parameter Data Type 1603h 00h 01h 02h 03h 04h Number of Supported Entries [4] Programmer Number [0.…7 corresponding to n=1….8] Programmer.n.SetUp.ProgRun Programmer.n.SetUp.ProgHold Programmer.n.SetUp.ProgReset Unsigned8 Integer16 Integer16 Integer16 Integer16 108 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 10.6.7 Enabling and Disabling PDO Communications The Mini8 is supplied with all 8 PDOs enabled. Every PDO has a mapping object and a communication object as shown. The PDO is enabled by resetting the appropriate bit and disabled by setting the appropriate bit. This is done using SDO communications. PDO Mapping Object Receive PDO1 Receive PDO2 Receive PDO3 Receive PDO4 Transmit PDO1 Transmit PDO2 Transmit PDO3 Transmit PDO4 Communication Object PDO Enable Object Sub-index / bit 1400h 1401h 1402h 1403h 1800h 1801h 1802h 1803h 1400h 1h /31 1401h 1h /31 1402h 1h /31 1403h 1h /31 1800h 1h /31 1801h 1h /31 1802h 1h /31 1803h 1h /31 1600h 1601h 1602h 1603h 1A00h 1A01h 1A02h 1A03h 10.6.8 Changing PDO Mapping If the parameters included as default above are not those required they may be replaced by others. The recommended way to do this is to redirect using the Commstab tables. The Manufacturer Object Pick List is in Appendix C. The first 32 items map directly onto the default PDOs which use Modbus addresses 15816 to 15847. The Commstab tables can map any instrument parameter onto these addresses. Modbus Address Manufacturer Object Pick List Default PDOs Mapping Object 15816 - 15819 2000h 01h – 04h 1600h 01h – 04h 15820 - 15823 2000h 05h – 08h 1601h 01h – 04h 15824 - 15827 2000h 09h – 0Ch 1602h 01h – 04h 15828 - 15831 2000h 0Dh – 104h 1603h 01h – 04h 15832 - 15835 2000h 11h – 14h 1A00h 01h – 04h 15836 - 15839 2000h 15h – 18h 1A01h 01h – 04h 15840 - 15843 2000h 19h – 1Ch 1A02h 01h – 04h 15844 - 15847 2000h 0Dh – 20h 1A03h 01h – 04h 15840 2000h 21h to to 16015 2000h C8h Part No HA028581 Issue 3 Sep-05 109 Engineering Handbook Mini8 Controller 10.6.8.1 Commstab Example 1 Remap Receive PDO 1 with UsrVal.1-4.Vals: Receive PDO1 from the Object pick list in Appendix C is shown below Object Index 2000h Sub Parameter Data Type Index Receive PDO1 Note: Sub indices 02h – 04h are letter boxed via sub index 01h. 01h Loop Number (Comms.InstNum1) Integer16 02h Loop.n.Main.TargetSP Integer16 03h Loop.n.Main.AutoMan Integer16 04h Loop.n.OP.ManualOutVal Integer16 SCADA Address 15816 15817 15818 15819 Similarly with Commstab 3 and 4 which will give a final Receive PDO 1 as shown in the diagram below. Note there is now no letterbox parameter as the indexing parameter has been replaced. Modbus Address Pick List Rx PDO 1 1 CommsTab Source UsrVal.1.Val 15816 2000h 01h 1600h 01h 2 UsrVal.2.Val 15817 2000h 02h 1600h 02h 3 UsrVal.3.Val 15818 2000h 03h 1600h 03h 4 UsrVal.4.Val 15819 2000h 04h 1600h 04h 10.6.8.2 Commstab Example 2 Remap Transmit PDO 3 sub index 04h with Loop.Main.AutoMan, using letter boxing for the loop instance. Receive PDO3 from the Object pick list in Appendix C is shown below. Object Index 2000h 110 Sub Parameter Data Type Index Transmit PDO3 Note: Sub indices 1Ah – 1Ch are letter boxed via sub index 19h. 19h Loop Number (Comms.InstNum5) Integer16 1Ah Loop.n.Main.PV Integer16 1Bh Loop.n.Main.WorkingSP Integer16 1Ch Loop.n.Main.ActiveOut Integer16 Part No HA028581 SCADA Address 15840 15841 15842 15843 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Enter 15843 as the Modbus Destination, and pick Loop.1.Main.AutoMan for the Source and set LetterBox to Yes. CommsTab Source 15 Loop.1.Main.AutoMan Modbus Address Pick List Tx PDO 3 15843 2000h 1Ch 1A02h 04h 10.6.8.3 Commstab Example 3 Remap Transmit PDO 3 sub index 04h with UsrVal.3.Val, not using letter boxing so that no matter what the loop instance UsrVal.3.Val will be transmitted: CommsTab Source 15 UsrVal.3.Val Modbus Address Pick List Tx PDO 3 15843 2000h 1Ch 1A02h 04h ☺ Use Commstab to remap PDO blocks. It is simpler and the remapping is saved in the Mini8 clone file. Part No HA028581 Issue 3 Sep-05 111 Engineering Handbook Mini8 Controller 10.6.9 Remapping over the network 10.6.9.1 Using SDO communications It is possible to remap any of the PDOs with entries from the Pick List using SDO communications. The following procedure must be followed: 1. Disable PDO by setting bit 31 sub index 1 of the PDOs communication object. 2. Deactivate PDO mapping object by writing ‘0’ to sub index 0 of the PDOs mapping object. 3. Re-map sub indices 1 – 4 with the new mappings 4. Activate PDO mapping object by writing the number of entries to sub index 0 of the PDOs mapping object 5. Enable PDO by resetting bit 31 sub index 1 of the PDOs communication object. For example, remapping Receive PDO1 of a Mini8 with a node address of 1 with UsrVal.1-4.Vals the following 8 “writes” must be executed: This is the screen shot of the first write in section 3 above. This uses the Node Manager (a simple CANopen master) to write the values. The Node Manager is a software tool supplied by IXXAT IXXAT Leibnizstr. 15 D 88250 Weingarten. www.ixaat.de info@ixxat.de 112 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 10.6.9.2 Using Device Configuration Software. This shows one step of the example above using configuration software. From the CANopen parameter tables in Appendix C UserVal 1 to 4 have sub-ibex C3h to C6h, or 195 to 198 so delete the existing elements in the Mapped Objects and add elements 195 to 198. Screen shot of the CANopen Configuration Studio, a software tool supplied by IXXAT. The remapping of a PDO, as shown in both examples above, is retained in RAM and would be lost if the instrument was turned off or if the PDO was remapped again. If the remapping needs to be retained then it must be ‘STORED’ in Non Volatile memory. See Store & Restore in General Communication Parameters. Part No HA028581 Issue 3 Sep-05 113 Engineering Handbook Mini8 Controller 10.6.10 Enabling & Disabling PDO Change of State transmission. It is possible to change the way a tramsmit PDO works – either cyclically or on change of state (COS), or both. Object Index 2002h allows COS transmission of PDOs to be enabled or disabled. Object Index Sub Index Parameter Data Type Values 2002h 00h TxPDO COS Enables Unsigned8 Bit Mask i.e. 0 = No TxPDOs transmitted on COS 1 = TxPDO 1 transmitted on COS 2 = TxPDO 2 transmitted on COS 3 = TxPDOs 1 & 2 transmitted on COS ... 16 = TxPDOs 1- 4 transmitted on COS As default PDO 1 & 2 only transmit on change of state, 3 & 4 transmit cyclically so the default bit mask value is 3 (0011). To make PDO 3 also transmit on change of state the third bit must be set so the value must be written as 7 (0111). In order for PDOs to be transmitted cyclically, sub-index 05h of the PDOs communication object should be set with the time required in multiples of 1ms. A value of 0 will disable the cyclic PDO transmission. 10.6.11 General Communication Objects 10.6.11.1 114 Device Type Information Index Sub Index Bit Description Value (U32) 1000h 00h 0 – 15 16 – 31 Device Profile Number: Additional Information: 0 (Generic Device) 0 (Generic Device) Part No HA028581 Issue 3 Sep-05 Mini8 Controller 10.6.11.2 Engineering Handbook Error Register Index Sub Index Bit Description Value (U32) Bit set = error 1001h 00h 0 Generic Error: 1 2 3 4 5 6 7 Current: Voltage: Temperature: Communication Error: Device Profile Defined Error: Reserved: Manufacture Specific Error: Mandatory Bit set = ANY error not supported not supported not supported Bit set = error not supported Always zero not supported 10.6.11.3 Manufacturer Device Name Index Sub Index Description Value (String) 1008h 00h Manufacturer Device Name EurothermMini8 Select ASCII as the format and the text name will be displayed. 10.6.11.4 Manufacturer Hardware Version This will indicate the issue of the CANopen daughter board. Index Sub Index Description Value (String) 1009h 00h Manufacturer Hardware Version e.g. Iss1 Part No HA028581 Issue 3 Sep-05 115 Engineering Handbook 10.6.11.5 Mini8 Controller Manufacturer Software Version This will indicate the software version of the instrument firmware. Index Sub Index Description Value (String) 100Ah 00h Formal Release (n: Phase m: Minor Revision) Vn.mm Engineering Release (n: Phase m: Minor Revision) En.mm 10.6.11.6 Store & Restore The Mini8 CANopen Interface allows the saving of PDO Mapping and Communication objects in non-volatile memory giving them three possible settings: Factory/Default settings, Power-On settings and Current settings. This allows the specified objects to be loaded with or set to different values upon certain events. The following diagram depicts the operational usage of each of the three settings: Factory/Default Settings (Hard Coded) Copy initiated by Restore Power-On Settings (NVOL) Copy initiated by Store Copy upon hardware reset Current Settings (RAM) Object Index Sub Index Parameter Data Type Values 2001h 00h Non-volatile Memory Status Unsigned8 0 = Nonvol Data Invalid 1 = Data in the process of being stored 2 = Nonvol Data Valid Store Index 1010h Sub Index 00h 01h Description Largest Sub-Index supported (1) Save all parameters (PDO mapping & Communication Objects) The Mini8 CANopen Interface supports the saving of parameters on request only i.e. does not support the saving of parameters autonomously. This is indicated when sub-index 01h is read: Bit 31 - 2 1 0 116 Value 0 0 1 Meaning Reserved Device does not save parameters autonomously Device saves parameters on command Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook In order to avoid saving parameters by mistake, saving is only executed when a specific signature is written to subindex 01h. The signature is “save”: ASCII: Hex: MSB e 65h v 76h a 61h LSB s 73h Or Using the IXXAT Node Manager, select ASCII Data and write ‘save’ It should be noted that whilst in the process of saving the parameter data to non-volatile memory it is not possible to write to the parameters that are currently being saved. Restore Index 1011h Sub Index 00h 01h Description Largest Sub-Index supported (1) Restore all parameters (PDO mapping & Communication Objects) In order to avoid restoring parameters back to default settings by mistake, restoring is only executed when a specific signature is written to sub-index 01h. The signature is “load”: ASCII: Hex: MSB d 64h a 61h o 6Fh LSB l 6Ch On reception of the correct signature the default parameter values are set to valid but will only take effect upon device reset or after a power cycle. Part No HA028581 Issue 3 Sep-05 117 Engineering Handbook 10.6.11.7 Mini8 Controller Heartbeat Time A heartbeat message will be generated cyclically at this interval (specified in ms). The default value is 0 indicating that the heartbeat messages are disabled. Index Sub Index Description Value milli-secs (U32) 1017h 00h Heartbeat Message Interval 0 = disabled. 0 10.6.11.8 Identity Object Index SubIndex Description 1018h 0 1 2 3 Number of Sub Index entries = 4 Unique Vendor ID = 0x000001BC Product Code = E800 Revision Number = Bits Description 0 – 15 Minor Revision Number (Initially: 0001h) 16 – 31 Major Revision Number (Initially: 0001h) Serial Number (32-bit interface board number entered by Eurotherm) 4 118 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 10.7 Profibus Up to 127 Nodes can be connected to a Profibus Network and the address is set via the comms DIP switches. The Baud Rate is auto-detected and set by the master. S w 8 7 6 5 4 3 2 1 OFF ON 8 Not Used Address 64 Address 32 Address 16 Address 8 Address 4 Address 2 Address 1 Example shows an address 68 1 OFF ↔ ON A description of Profibus is given in the Profibus Communications Handbook Part No HA026290. Part No HA028581 Issue 3 Sep-05 119 Engineering Handbook Mini8 Controller 10.8 Ethernet 10.8.1 Instrument setup It is recommended that you setup the communications settings for each instrument before connecting it to any Ethernet network. This is not essential but network conflicts may occur if the default settings interfere with equipment already on the network. By default the instruments are set to a fixed IP address of 192.168.111.222 with a default SubNet Mask setting of 255.255.255.0. IP Addresses are usually presented in the form "xxx.xxx.xxx.xxx". In the instrument Comms folder each element of the IP Address is shown and configured separately. "IP address 1" relates to the first set of three digits, IP address 2 to the second set of three digits and so on. This also applies to the SubNet Mask, Default Gateway and Preferred master IP Address. Each Ethernet module contains a unique MAC address, normally presented as a 12 digit hexadecimal number in the format "aa-bb-cc-dd-ee-ff". In the Mini8 instruments MAC addresses are shown as 6 separate decimal values in iTools. MAC1 shows the first pair of digits in decimal, MAC2 shows the second pair of digits and so on. 10.8.2 Unit Identity The Modbus TCP Specification includes the ‘normal’ Modbus address as part of the packaged Modbus message – where it is called the Unit Identifier. If such a message is sent to an Ethernet / Serial gateway, the Unit Ident is essential to identify the slave instrument on the serial port. When a stand alone Ethernet instrument is addressed however, the Unit Ident is surplus to requirements since the IP address fully identifies the instrument. To allow for both situations the Unit Ident Enable parameter is used to enable or disable checking of the Unit Ident received from TCP. The enumerations produce the following actions: ‘Instr’: the received Unit Ident must match the Modbus address in the instrument or there will be no response. ‘Loose’: the received Unit Ident value is ignored, thus causing a reply regardless of the received Unit Ident. ‘Strict’: the received Unit Ident value must be 0xFF or there will be no reply. 10.8.3 Dynamic Host Configuration Protocol (DHCP) Settings IP addresses may be ‘fixed’ – set by the user, or dynamically allocated by a DHCP server on the network. This is set by Switch 8 on the DIL address switch. If the IP Addresses are to be dynamically allocated the server uses the instrument MAC address to uniquely identify it. For fixed IP Addresses set the IP address as well as the SubNet Mask. These must be configured into the instrument using iTools. Remember to note the allocated addresses. 10.8.3.1 Fixed IP Addressing Address Switch 8 OFF. In the "Comms" folder of the instrument the "DHCP enable" parameter will be set to "Fixed". Set the IP address and SubNet Mask as required. 10.8.3.2 Dynamic IP Addressing Address Switch 8 ON. In the "Comms" folder of the instrument the "DHCP enable" parameter will be set to "Dynamic". Once connected to the network and powered, the instrument will acquire its "IP address", "SubNet Mask" and "Default gateway" from the DHCP Server and display this information within a few seconds. 120 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 10.8.3.3 Default Gateway The "Comms" tab also includes configuration settings for "Default Gateway", these parameters will be set automatically when Dynamic IP Addressing is used. When fixed IP addressing is used these settings are only required if the instrument needs to communicate wider than the local area network i.e. over the internet. 10.8.3.4 Preferred Master The "Comms" tab also includes configuration settings for "Preferred Master". Setting this IP address to the IP Address of a particular PC will guarantee that one of the 4 available Ethernet sockets will always be reserved for that PC (reducing the number of available sockets for anonymous connections to 3). S w 8 7 6 5 4 3 2 1 10.8.4 OFF ON DHCP fixed Not used Not used - DHCP dynamic Modbus Address 16 Modbus Address 8 Modbus Address 4 Modbus Address 2 Modbus Address 1 8 Example shows dynamic DHCP and Modbus address 5 1 OFF ↔ ON iTools Setup iTools configuration package, version V5.60 or later, may be used to configure Ethernet communications. The following instructions configure Ethernet. To include a Host Name/Address within the iTools scan:1. Ensure iTools is NOT running before taking the following steps 2. Within Windows, click ‘Start’, the ‘Settings’, then ‘Control Panel’ 3. In control panel select ‘iTools’ 4. Within the iTools configuration settings select the ‘TCP/IP’ tab 5. Click the ‘Add’ button to add a new connection 6. Enter a name for this TCP/IP connection 7. Click the ‘Add’ button to add the host name or IP address of the instrument in the ‘Host Name/ Address’ section 8. Click ‘OK’ to confirm the new Host Name/IP Address you have entered 9. Click ‘OK’ to confirm the new TCP/IP port you have entered 10. You should now see the TCT/IP port you have configured within the TCP/IP tab of the iTools control panel settings iTools is now ready to communicate with an instrument at the Host Name/IP Address you have configured Part No HA028581 Issue 3 Sep-05 121 Engineering Handbook 10.8.5 Mini8 Controller Ethernet Parameters Folder - Comms Sub-folder: FC Name Parameter Description Value Ident Identifies that the comms module is fitted. None No module fitted Comms Communications module fitted Protocol Digital communications protocol MODBUS; Profibus; DeviceNet; Ethernet,CANopen Address Comms Address 1 to 253 UnitID Enable Unit Identity Enable Strict Unit ID must be 0xFF (255) Loose Unit ID ignored Instr Unit ID must be instrument address DHCP Type Fixed Manually set IP addresses SET BY Address switch 8 Dynamic (Sw 8 OFF) DHCP enable Default Access Level R/O Conf 1 Oper Strict Conf RO IP addresses set by DCHP server (Sw 8 ON) IP Address 1 1st Byte IP address 0 to 255 192 Conf IP Address 2 2nd Byte IP address 0 to 255 168 Conf IP Address 3 3rd Byte IP address 0 to 255 111 Conf IP Address 4 4th Byte IP address 0 to 255 222 Conf Subnet Mask 1 1st Byte Subnet Mask 0 to 255 255 Conf Subnet mask 2 2nd Byte Subnet Mask 0 to 255 255 Conf Subnet Mask 3 3rd Byte Subnet Mask 0 to 255 255 Conf Subnet Mask 4 4th Byte Subnet Mask 0 to 255 0 Conf Default Gateway 1 1st Byte Default Gateway 0 to 255 0 Conf Default Gateway 2 2nd Byte Default Gateway 0 to 255 0 Conf Default Gateway 3 3rd Byte Default Gateway 0 to 255 0 Conf Default Gateway 4 4th Byte Default Gateway 0 to 255 0 Conf Pref mstr IP 1 1st Byte Preferred Master IP address 0 to 255 0 Conf Pref mstr IP 2 2nd Byte Preferred Master IP address 0 to 255 0 Conf Pref mstr IP 3 3rd Byte Preferred Master IP address 0 to 255 0 Conf Pref mstr IP 4 4th Byte Preferred Master IP address 0 to 255 0 Conf MAC1 MAC address 1 R/O MAC2 MAC address 2 R/O MAC3 MAC address 3 R/O MAC4 MAC address 4 R/O MAC5 MAC address 5 R/O MAC6 MAC address 6 R/O 122 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Folder - Comms Sub-folder: FC Name Parameter Description Value Ethernet Status Ethernet network status Running Network connected and working Offline Network not connected or working Part No HA028581 Issue 3 Sep-05 Default Access Level R/O 123 Engineering Handbook 11. Mini8 Controller CH. 11 COUNTERS, TIMERS, TOTALISERS, RT CLOCK A series of function blocks are available which are based on time/date information. These may be used as part of the control process. 11.1 Counters Up to two counters are available. They provide a synchronous edge triggered event counter. Direction Enable Clock Target Counter Function Block Count Overflow RippleCarry Reset Clear Overflow Figure 11-1: Counter Function Block When configured as an Up counter, Clock events increment Count until reaching the Target. On reaching Target RippleCarry is set true. At the next clock pulse, Count returns to zero. Overflow is latched true and RippleCarry is returned false. When configured as a down counter, Clock events decrement Count until it reaches zero. On reaching zero RippleCarry is set true. At the next clock pulse, Count returns to the Target count. Overflow is latched true and RippleCarry is reset false Counter blocks can be cascaded as shown in the diagram below Direction Enable Clock Target Reset Clear Overflow Count Counter Function Block 1 Overflow RippleCarry Direction Enable Clock Target Reset Count Counter Function Block 1 Overflow RippleCarry Clear Overflow Figure 11-2: Cascading Counters The RippleCarry output of one counter acts as an enabling input for the next counter. In this respect the next counter in sequence can only detect a clock edge if it was enabled on the previous clock edge. This means that the Carry output from a counter must lead its Overflow output by one clock cycle. The Carry output is, therefore, called a RippleCarry as it is NOT generated on an Overflow (i.e. Count > Target) but rather when the count reaches the target (i.e. Count = Target). The timing diagram below illustrates the principle for the Up Counter. 124 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Count = Target -1 Clock Count = Target Count = 0 RippleCarry Overflow Figure 11-3: Timing Diagram for an Up Counter 11.1.1 Counter Parameters Folder - Counter Sub-folders: 1 to 2 Name Parameter Description Value Enable Counter enable. Yes Enabled Counter 1 or 2 is enabled in the Instrument Options folder but they can also be turned on or off in this list No Disabled Defines count up or count down. Up Up counter This is not intended for dynamic operation (i.e. subject to change during counting). It can only be set in configuration level. Down Down counter Ripple Carry Ripple carry to act as an enabling input to the next counter. It is turned On when the counter reaches the target set Off Overflow Overflow flag is turned on when the counter reaches zero Clock Tick period to increment or decrement the count. This is normally wired to an input source such as a digital input. 0 No clock input 1 Clock input present Target Level to which the counter is aiming 0 to 99999 Count Counts each time a clock input occurs until the target is reached. 0 to 99999 Reset Resets the counter Direction Clear Overflow Part No HA028581 Clear overflow flag Issue 3 Sep-05 Default Access Level No Oper Up Conf R/O R/O 0 R/O if wired 9999 Oper R/O No Not in reset Yes Reset No Not cleared Yes Cleared No Oper No Oper 125 Engineering Handbook Mini8 Controller 11.2 Timers Up to eight timers can be configured. Each one can be configured to a different type and can operate independently of one another. 11.2.1 Timer Types Each timer block can be configured to operate in four different modes. These modes are explained below 11.2.2 On Pulse Timer Mode This timer is used to generate a fixed length pulse from an edge trigger. • The output is set to On when the input changes from Off to On. • The output remains On until the time has elapsed • • If the ‘Trigger’ input parameter recurs while the Output is On, the Elapsed Time will reset to zero and the Output will remain On The triggered variable will follow the state of the output The diagram illustrates the behaviour of the timer under different input conditions. Input Output Time Time Elapsed Time Triggered Input Interval > Time Input Output Time Elapsed Time Triggered Figure 11-4: On Pulse Timer Under Different Input Conditions 126 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 11.2.3 On Delay Timer Mode This timer provides a delay between the trigger event and the Timer output. If the input pulse is less than the set delay time there is no output pulse. • The Output is set to Off when the Input changes from Off to On. • The Output remains Off until the Time has elapsed. • If the Input returns to Off before the time has elapsed, the Timer will cease and there will be no output. • If the Input remains on until the Time has elapsed, the Output will be set to On. • The Output will remain On until the Input is cleared to Off. • The Triggered variable will be set to On by the Input changing from Off to On. It will remain On until both the Time has elapsed and the Output has reset to Off. The diagram illustrates the behaviour of the timer under different input conditions. Input Time Output Time Elapsed Time Triggered Figure 11-5: On Delay Timer under Different Input Conditions Part No HA028581 Issue 3 Sep-05 127 Engineering Handbook Mini8 Controller 11.2.4 One Shot Timer Mode This timer behaves like a simple oven timer. • When the Time is edited to a non-zero value the Output is set to On • The Time value is decremented until it reaches zero. The Output is then cleared to Off • The Time value can be edited at any point to increase or decrease the duration of the On time • Once set to zero, the Time is not reset to a previous value, it must be edited by the operator to start the next On-Time • The Input is used to gate the Output. If the Input is set, the time will count down to zero. If the Input is cleared to Off, then the Time will hold and the Output will switch Off until the Input is next set. Note: since the Input is a digital wire, it is possible for the operator to NOT wire it, and set the Input value to On which permanently enables the timer. • The Triggered variable will be set to On as soon as the Time is edited. It will reset when the Output is cleared to Off. The behaviour of the timer under different input conditions is shown below. Input Time Edited Time Edited Output B A Time A+B = Time Time Elapsed Time Triggered This diagram shows how the Input can be used to gate the Timer as a type of hold Input Time Edited Output A+B+C+D = Time A B C D Figure 11-6: One Shot Timer 128 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 11.2.5 Minimum On Timer or Compressor Mode This timer has been targeted at guaranteeing that the output remains On for a duration after the input signal has been removed. It may be used, for example, to ensure that a compressor is not cycled excessively. • The output will be set to On when the Input changes from Off to On. • When the Input changes from On to Off, the elapsed time will start incrementing towards the set Time. • The Output will remain On until the elapsed time has reached the set Time. The Output will then switch Off. • If the Input signal returns to On while the Output is On, the elapsed time will reset to 0, ready to begin incrementing when the Input switches Off. • The Triggered variable will be set while the elapsed time is >0. It will indicate that the timer is counting. The diagram illustrates the behaviour of the timer under different input conditions. Input Output Elapsed Time Time Time Triggered Figure 11-7: Minimum On Timer Under Different Input Conditions Part No HA028581 Issue 3 Sep-05 129 Engineering Handbook Mini8 Controller 11.2.6 Timer Parameters Folder – Timer Sub-folders: 1 to 4 Name Parameter Description Value Type Timer type Off Timer not configured On Pulse Generates a fixed length pulse from an edge trigger Off Delay Provides a delay between input trigger event and timer putput One Shot Simple oven timer which reduces to zero before switching off Min-On Ti Compressor timer guaranteeing that the output remains ON for a time after the input signal has been removed Time Default Access Level Off Conf 0:00.0 Oper Duration of the timer. For re-trigger timers this value is entered once and copied to the time remaining parameter whenever the timer starts. For pulse timers the time value itself is decremented. Timer elapsed time 0:00.0 to 99:59:59 In Trigger/Gate input. Turn On to start timing Off Off On Start timing Out Timer output Off On Output off Timer has timed out R/O Triggered Timer triggered (timing). This is a status output to indicate that the timers input has been detected Off Not timing R/O On Timer timing Elapsed Time R/O 0:00.0 to 99:59:59 Off Oper The above table is repeated for Timers 2 to 4. 130 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 11.3 Totalisers There are two totaliser function blocks which are used to measure the total quantity of a measurement integrated over time. A totaliser can, by soft wiring, be connected to any measured value. The outputs from the totaliser are its integrated value and an alarm state. The user may set a setpoint which causes the alarm to activate once the integration exceeds the setpoint. The totaliser has the following attributes:1. Run/Hold/Reset In Run the totaliser will integrate its input and continuously test against an alarm setpoint. In Hold the totaliser will stop integrating its input but will continue to test for alarm conditions. In Reset the totaliser will be zeroed, and alarms will be reset. 2. Alarm Setpoint If the setpoint is a positive number, the alarm will activate when the total is greater than the setpoint. If the setpoint is a negative number, the alarm will activate when the total is lower (more negative) than the setpoint. If the totaliser alarm setpoint is set to 0.0, the alarm will be off. It will not detect values above or below. The alarm output is a single state output. It may be cleared by resetting the totaliser, or by changing the alarm setpoint. 3. Limits The total is limited to a maximum of 9,999,999,999 and a minimum of -9,999,999,999. 4. Resolution The totaliser ensures that resolution is maintained when integrating small values onto a large total. Part No HA028581 Issue 3 Sep-05 131 Engineering Handbook Mini8 Controller 11.3.1 Totaliser Parameters Folder – Total Sub-Folders: 1 to 2 Name Parameter Description Value Default TotalOut In The totalised value The value to be totalised -9999.9 to 9999.9. ±9,999,999,999 Access Level R/O Oper Note:- the totaliser stops accumulating if the input is ‘Bad’. Units Totaliser units None AbsTemp V, mV, A, mA, PH, mmHg, psi, Bar, mBar, %RH, %, mmWG, inWG, inWW, Ohms, PSIG, %O2, PPM, %CO2, %CP, %/sec, RelTemp mBar/Pa/T sec, min, hrs, Resolution Totaliser resolution XXXXX Conf XXXXX Conf XXXX.X XXX.XX XX.XXX X.XXXX Alarm SP AlarmOut Run Hold Reset 132 Sets the totalised value at which an alarm will occur This is a read only value which indicates the alarm output On or Off. The totalised value can be a positive number or a negative number. If the number is positive the alarm occurs when Total > + Alarm Setpoint If the number is negative the alarm occurs when Total > - Alarm Setpoint Runs the totaliser Holds the totaliser at its current value Note: The Run & Hold parameters are designed to be wired to (for example) digital inputs. Run must be ‘on’ and Hold must be ‘off’ for the totaliser to operate. Resets the totaliser ±9,999,999,999 Oper Off On Alarm inactive Alarm output active Off Oper No Yes No Yes Totaliser not running Select Yes to run the totaliser Totaliser not in hold Hold totaliser No Oper No Oper No Totaliser not in reset No Oper Yes Totaliser in reset Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 11.4 Real Time Clock A real time clock (day of week and time only) is used to provide a daily and weekly scheduling facility and provides two corresponding outputs. The configuration for an output is an On-Day and an On-Time and an Off-Day and an Off-Time. The Real Time Clock also provides the time stamping in the AlarmLog (Section 8.8). The day options supported are:Day Option Never Monday Tuesday Wednesday Thursday Friday Saturday Sunday Mon-Fri Mon-Sat Sat-Sun Everyday Description Disables the output feature Output will only be available on a Monday Output will only be available on a Tuesday Output will only be available on a Wednesday Output will only be available on a Thursday Output will only be available on a Friday Output will only be available on a Saturday Output will only be available on a Sunday Output will only be available between Monday to Friday Output will only be available on between Monday to Saturday Output will only be available on between Saturday to Sunday Output always available For example, it is possible to configure an output to be activated at 07:30 on Monday and deactivated at 17:15 on Friday The output from the Real Time Clock outputs may be used to place the instrument in standby or to sequence a batch process. The Real Time Clock function will set/clear the outputs only at the configured time. Therefore it is possible to override the outputs manually, by editing the output to On/Off between output activations. The Real Time Clock does not display date or year. 11.4.1 Real Time Clock Parameters Folder – RTClock Sub Folders: None Name Parameter Description Value Mode This parameter can be used to set the clock Running Edit Stopped Day Displays the day or allows the day to be set when in Edit mode Displays the time or allows the time to be set when in Edit mode Days when output 1 and 2 are activated Time of day when output 1 and 2 are activated Days when output 1 and 2 are deactivated Time of day when output 1 and 2 are de-activated Output 1 and 2 Monday to Sunday Oper 00:00:00 to 23:59:59 Oper See table above Oper 00:00:00 to 23:59:59 Oper See table above Oper 00:00:00 to 23:59:59 Oper Off On Oper Time On Day1 On Day2 On Time1 On Time2 Off Day1 Off Day2 Off Time1 Off Time2 Out1 Out2 Part No HA028581 Issue 3 Sep-05 Normal operation Allows the clock to be set Clock stopped (saves battery life) Output not activated Output activated Default Access Level Stopped Oper 133 Engineering Handbook 12. Mini8 Controller CHAPTER 12 APPLICATIONS 12.1 Humidity 12.1.1 Overview Humidity (and altitude) control is a standard feature of the Mini8 controller. In these applications the controller may be configured to generate a setpoint profile (see Section 18 ‘Setpoint Programmer’). Also the controller may be configured to measure humidity using either the traditional Wet/Dry bulb method or it may be interfaced to a solid state sensor. The controller output may be configured to turn a refrigeration compressor on and off, operate a bypass valve, and possibly operate two stages of heating and/or cooling 12.1.2 Temperature Control of an Environmental Chamber The temperature of an environmental chamber is controlled as a single loop with two control outputs. The heating output time proportions electric heaters, usually via a solid state relay. The cooling output operates a refrigerant valve which introduces cooling into the chamber. The controller automatically calculates when heating or cooling is required. 12.1.3 Humidity Control of an Environmental Chamber Humidity in a chamber is controlled by adding or removing water vapour. Like the temperature control loop two control outputs are required, i.e. Humidify and Dehumidify. To humidify the chamber water vapour may be added by a boiler, an evaporating pan or by direct injection of atomised water. If a boiler is being used adding steam increases the humidity level. The humidify output from the controller regulates the amount of steam from the boiler that is allowed into the chamber. An evaporating pan is a pan of water warmed by a heater. The humidify output from the controller humidity regulates the temperature of the water. An atomisation system uses compressed air to spray water vapour directly into the chamber. The humidify output of the controller turns on or off a solenoid valve. Dehumidification may be accomplished by using the same compressor used for cooling the chamber. The dehumidify output from the controller may control a separate control valve connected to a set of heat exchanger coils. 134 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 12.1.4 Humidity Parameters List Folder – Humidity Sub-folder: None Name Parameter Description Value Resolution Resolution of the relative humidity Psychro Const The psychrometric constant at a given pressure (6.66E-4 at standard atmospheric pressure). The value is dependent on the speed of air-flow across the wet bulb, and hence the rate of evaporation. 6.66E-4 is for the ASSMANN ventilated Psychrometer. Atmospheric Pressure XXXXX XXXX.X XXX.XX XX.XXX X.XXXX 0.0 to 10.0 Pressure WetTemp WetOffset DryTemp RelHumid Wet Bulb Temperature Wet bulb temperature offset Dry Bulb Temperature Relative Humidity is the ratio of actual water vapour pressure (AVP) to the saturated water vapour pressure (SVP) at a particular temperature and pressure The dew point is the temperature to which air would need to cool (at constant pressure and water vapour content) in order to reach saturation Indicates that one of the probes is broken. DewPoint Sbrk Default Access Level Conf 0.0 to 2000.0 Range units -100.0 to 100.0 Range units 0.0 to 100.0 6.66 Oper 1013.0 mbar Oper 0.0 Oper 100 R/O -999.9 to 999.9 R/O No Yes Conf No sensor break detection Sensor break detection enabled 12.2 Zirconia (Carbon Potential) Control A Mini8 controller has a Zirconia function block which may be used to control Carbon potential. The controller is often a programmer which generates carbon potential profiles. In this section it is assumed that a programmer is used. Calculation of PV: The Process Variable can be Carbon Potential, Dewpoint or Oxygen concentration. The PV is derived from the probe temperature input, the probe mV input and remote gas reference input values. Various probe makes are supported. In the 3500 Carbon Potential and Dewpoint can be displayed together. The following definitions may be useful:- 12.2.1 Temperature Control The sensor input of the temperature loop may come from the zirconia probe but it is common for a separate thermocouple to be used. The controller provides a heating output which may be connected to gas burners or thyristors to control electrical heating elements. In some applications a cooling output may also be connected to a circulation fan or exhaust damper. Part No HA028581 Issue 3 Sep-05 135 Engineering Handbook 12.2.2 Mini8 Controller Carbon Potential Control The zirconia probe generates a millivolt signal based on the ratio of oxygen concentrations on the reference side of the probe (outside the furnace) to the amount of oxygen in the furnace. The controller uses the temperature and carbon potential signals to calculate the actual percentage of carbon in the furnace. This second loop generally has two outputs. One output is connected to a valve which controls the amount of an enrichment gas supplied to the furnace. The second output controls the level of dilution air. 12.2.3 Sooting Alarm In addition to other alarms which may be detected by the controller, the 3500 can trigger an alarm when the atmospheric conditions are such that carbon will be deposited as soot on all surfaces inside the furnace. The alarm may be connected to an output (e.g. relay) to initiate an external alarm. 12.2.4 Automatic Probe Cleaning The Zirconia function block has a probe clean and recovery strategy that can be programmed to occur between batches or manually requested. At the start of the cleaning process a ‘snapshot’ of the probe mV is taken, and a short blast of compressed air is used to remove any soot and other particles that may have accumulated on the probe. A minimum and maximum cleaning time can be set by the user. If the probe mV has not recovered to within 5% of the snapshot value within the maximum recovery time set then an alarm is given. This indicates that the probe is ageing and replacement or refurbishment is due. During the cleaning and recovery cycle the PV is frozen, thereby ensuring continuous furnace operation. A flag ‘PvFrozen’ is set which can be used in an individual strategy, for example to hold the integral action during cleaning. 12.2.5 Endothermic Gas Correction A gas analyser may be used to determine the CO concentration of the endothermic gas. If a 4-20mA output is available from the analyser, it can be fed into the 3500 to automatically adjust the calculated % carbon reading. Alternatively, this value can be entered manually. 12.2.6 Clean Probe As these sensors are used in furnace environments they require regular cleaning. Cleaning (Burn Off) is performed by forcing compressed air through the probe. Cleaning can be initiated either manually or automatically using a timed period. During cleaning the PV output is frozen. 12.2.7 Probe Status After cleaning an alarm output, MinCalcT, is generated if the PV does not return to 95% of its previous value within a specified time. This indicates that the probe is deteriorating and should be replaced. 136 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 12.2.8 Zirconia Parameters Folder - Zirconia Sub-folders: None Name Parameter Description Value Probe Type Configures the type of probe to be used Resolution Resolution of the calculated result Drayton Accucarb SSI MacDhui %O2 LogO2 BoschO2 ZircoDew ProbeMV BoschCarb BarberC MMICarb AACC XXXXX XXXX.X XXX.XX XX.XXX X.XXXX Default Drayton Accucarb SSI MacDhui Oxygen Log Oxygen Bosch Oxygen Dewpoint. Probe mV Bosch Carbon Barber-Colman MMI Carbon AACC Access Level Op X Op 20.0 Op 0.0 Op 0 Op -99999 to 99999 720 Op Parameters shown in shaded rows below are not applicable to O2 probes GasRef Gas reference value -9999.9 to 9999.9 RemGasRef Remote gas reference value -9999.9 to 9999.9 RemGasEn 0 1 OxygenExp Enable the remote gas reference. This can be an internal value from the user interface or from an external source Minimum calculation temperature Oxygen exponent Tolerance Tolerance of the sooting -9999.9 to 9999.9 1.0 Op CleanFreq Frequency of the cleaning process Sets the duration of the clean 0:00:00 to 99:59:59 or 100:00 to 500:00 4:00:00 Op 0:00:00 to 99:59:59 or 100:00 to 500:00 0:00:00 Op 0:00:00 to 99:59:59 or 100:00 to 500:00 0:00:00 Op 0:00:00 to 99:59:59 or 100:00 to 500:00 0:10:00 Op Temp range -99999 to 99999 0 ProbeInput Minimum recovery time after purging Maximum recovery time after purging Zirconia probe temperature input value Sets a temperature offset for the probe Zirconia probe mV input ProbeOffset Zirconia probe mV offset -99999 to 99999 0 Oxygen Calculated oxygen 0 CarbonPot Calculated carbon potential 0 R/O DewPoint Zirconia control process value The O2 or dew point value derived from temperature and remote gas reference inputs Probe sooting alarm output 0 R/O No R/O MinCalTemp CleanTime MinRcovTime MaxRcovTime TempInput TempOffset SootAlm Part No HA028581 Issue 3 Sep-05 Internal External Op Op Op No Yes No alarm output In alarm Op 137 Engineering Handbook Folder - Zirconia Mini8 Controller Sub-folders: None Name Parameter Description Value Default Access Level ProbeFault Probe fault No Op PvFrozen This is a Boolean which freezes the PV during a purging cycle. It may have been wired, for example, to disable control output during purging Enable the clean valve No Yes No Yes No R/O No Yes Waiting Cleaning Recovering No Yes No R/O CleanValve CleanState The burn off state of the zirconia probe CleanProbe Enable clean probe This may be wired to initiate automatically or if un-wired can be set by the user Time to next clean Time2Clean ProbeStatus 138 Indicates the status of the probe R/O Do not clean probe Initiate probe clean 0:00:00 to 99:59:59 or 100:00 to 500:00 OK MVSbr TempSbr MinCalcT No Op 0 R/O Normal working Probe input in sensor break Temperature input in sensor break Probe deteriorating Part No HA028581 R/O Issue 3 Sep-05 Mini8 Controller 13. Engineering Handbook CHAPTER 13 INPUT MONITOR 13.1 Description There are two Input monitors. Each input monitor may be wired to any variable in the controller. It then provides three functions:1. Maximum detect 2. Minimum detect 3. Time above threshold 13.1.1 Maximum Detect This function continuously monitors the input value. If the value is higher than the previously recorded maximum, it becomes the new maximum. This value is retained following a power fail. 13.1.2 Minimum Detect This function continuously monitors the input value. If the value is lower than the previously recorded minimum, it becomes the new minimum. This value is retained following a power fail. 13.1.3 Time Above Threshold This function increments a timer whenever the input is above a threshold value. If the timer exceeds 24 hours per day, a counter is incremented. The maximum number of days is limited to 255. A time alarm can be set on the timer so that once the input has been above a threshold for a period, an alarm output is given. Applications include:• Service interval alarms. This sets an output when the system has been running for a number of days (up to 255 days) • Material stress alarms - if the process cannot tolerate being above a level for a period. This is a style of ‘policeman’ for processes where the high operating point degrades the life of the machine. • In internal wiring applications in the controller Part No HA028581 Issue 3 Sep-05 139 Engineering Handbook Mini8 Controller 13.2 Input Monitor Parameters Folder - IPMonitor Sub-Folders: 1 or 2 Name Parameter Description Value In The input value to be monitored May be wired to an input source. The range will depend on the source Oper R/O if wired Max The maximum measured value recorded since the last reset The minimum measured value recorded since the last reset The input timer accumulates the time the input PV spends above this trigger value. Accumulated days the input has spent above threshold since the last reset. As above R/O As above R/O As above Oper Days is an integer count of the 24 hour periods only. The Days value should be combined with the Time value to make the total time above threshold. The time value accumulates from 00:00.0 to 23:59.9. Overflows are added to the days value 0 to 255 R/O 0 Oper 0:00.0 to 99:59:59 0:00.0 Oper Min Threshold Days Above Time Above AlarmDays AlarmTime Out Reset In Status 140 Accumulated time above the ‘Threshold’ since last reset. Days threshold for the monitors time alarm. Used in combination with the Alarm Time parameter. The ‘Out’ is set to true if the inputs accumulated time above threshold is higher than the timer high parameters. Time threshold for the monitors time alarm. Used in combination with the Alarm Days parameter. The ‘Out’ is set to true if the inputs accumulated time above threshold is higher than the timer high parameters. Set true if the accumulated time that the input spends above the trigger value is higher than the alarm threshold. Resets the Max and Min values and resets the time above threshold to zero. Monitors the status of the input Default Off On Normal operation time above setpoint exceeded No Yes Normal operation Reset values Good Bad Normal operation The input may be incorrectly wired R/O R/O No Part No HA028581 Access Level Oper R/O Oper Issue 3 Sep-05 Mini8 Controller 14. Engineering Handbook CHAPTER 14 LOGIC AND MATHS OPERATORS. 14.1 Logic Operators Logic Operators allow the controller to perform logical calculations on two input values. These values can be sourced from any available parameter including Analogue Values, User Values and Digital Values. The parameters to use, the type of calculation to be performed, input value inversion and ‘fallback’ value are determined in Configuration level. There are 24 separate calculations – they do not have to be in sequence. When logic operators are enabled a Folder ‘Lgc2’ exists where the 2 denotes two input logic operators. Logic input 1 Logic operator (Oper) Invert Logic input 2 Output Value (result of calculation) Invert Figure 14-1: 2 Input Logic Operators Logic Operators are found under the folder ‘Lgc2’. Note that the logic operators can also be enable by dragging a block onto the graphical wiring screen in iTools. 14.1.1 Logic 8 Logic 8 operators can perform logic calculations on up to eight inputs. The calculations are limited to AND,OR,XOR. Up to two 8 input operators can be enabled. The folder is labelled ‘Lgc8’ to denote eight input logic operators. Logic input 1 Invert Logic input 2 Invert Logic input 3 Invert Logic input 4 Invert Logic input 5 Invert Output Value (result of calculation) Logic operator (Oper) Invert Logic input 6 Invert Logic input 7 Invert Logic input 8 Invert Figure 14-2: 8 Input Logic Operators Part No HA028581 Issue 3 Sep-05 141 Engineering Handbook Mini8 Controller 14.1.2 2 input Logic Operations The following calculations can be performed: Oper 0: OFF Operator description The selected logic operator is turned off Input 1 Input 2 Output Invert = None 1: AND The output result is ON when both Input 1 and Input 2 are ON 0 0 Off 1 0 Off 0 1 Off 1 1 On 0 0 Off 1 0 On 0 1 On 1 1 On 0 0 Off 1 0 On 0 1 On 1 1 Off 0 0 1 0 0 1 1 1 0 0 On 1 0 Off 0 1 Off 1 1 On 0 0 Off 1 0 On 0 1 On 1 1 Off 0 0 Off 1 0 On 0 1 Off 1 1 Off 0 0 Off 1 0 Off 0 1 On 2: OR 3: XOR 4: Latch 5: Equal (==) 6: Not equal (<>) 7: Greater than (>) 8: Less than (<) 9: Equal to or Greater than (=>) 10: Less than or Equal to (<=) The output result is ON when either Input 1 or Input 2 is ON Exclusive OR. The output result is true when one and only one input is ON. If both inputs are ON the output is OFF. Input 1 sets the latch, Input 2 resets the latch. The output result is ON when Input 1 = Input 2 The output result is ON when Input 1 does not equal Input 2 The output result is ON when Input 1 > Input 2 The output result is ON when Input 1 < Input 2 The output result is ON when Input 1 > Input 2 The output result is ON when Input 1 < Input 2 1 1 Off 0 0 On 1 0 On 0 1 Off 1 1 On 0 0 On 1 0 Off 0 1 On 1 1 On Note 1: The numerical value is the value of the enumeration Note 2: For options 1 to 4 an input value of less than 0.5 is considered false and greater than or equal to 0.5 as true. 142 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 14.1.3 Logic Operator Parameters Folder – Lgc2 (2 Input Operators) Sub-Folders: 1 to 24 Name Parameter Description Value Default Access Level Oper To select the type of operator See previous table None Conf In1 In2 FallbackType Input 1 Input 2 The fallback state of the output if one or both of the inputs is bad Normally wired to a logic, analogue or user value. May be set to a constant value if not wired. 0 OPER 0: FalseBad 1: TrueBad 2: FalseGood 3: TrueGood Invert The sense of the input value, may be used to invert one or both of the inputs Out The output from the operation is a boolean (true/false) value. The status of the result value Status Part No HA028581 Issue 3 Sep-05 0: None 1: Input1 2: Input2 3: Both On Off Good Bad The output value is FALSE and the status is GOOD. The output value is FALSE and the status is BAD The output value is TRUE and the status is GOOD The output value is TRUE and the status is BAD. Neither input inverted Invert input 1 Invert input 2 Invert both inputs Output activated Output not activated Conf Conf R/O R/O 143 Engineering Handbook Mini8 Controller 14.2 Eight Input Logic Operators The eight input logic operator may be used to perform the following operations on eight inputs. Oper 0: OFF 1: AND 2: OR 3: XOR Operator description The selected logic operator is turned off The output result is ON when ALL eight inputs are ON The output result is ON when one or more of the 8 inputs are ON Exclusive OR – the output is true if an odd number of inputs are true. (In1 ⊕ In2) ⊕ (In3 ⊕ In4) ⊕ (In5 ⊕ In6) ⊕ (In7 ⊕ In8) Eight Input Logic Operator Parameters Folder – Lgc8 (8 Input Operators) Sub-Folders: 1 to 4 Name Parameter Description Value Oper To select the type of operator 0: OFF Operator turned off 1: AND Output ON when all inputs are ON 2: OR Output ON when one input is ON 3: XOR Exclusive OR NumIn InInvert This parameter is used to configure the number of inputs for the operation Used to invert selected inputs prior to operation. This is a status word with one bit per input, the left hand bit inverts input 1. Out Invert Invert the output In1 to In8 Input state 1 to 8 Out Output result of the operator 144 Default Access Level OFF Conf 1 to 8 2 Conf The invert parameter is interpreted as a bitfield where: 1 (0x1) - input 1 2 (0x2) - input 2 4 (0x4) - input 3 8 (0x8) - input 4 16 (0x10) - input 5 32 (0x20) - input 6 64 (0x40)- input 7 128 (0x80)- input 8 (e.g. 255 = all eight) No Output not inverted Yes Output inverted Normally wired to a logic, analogue or user value. When wired to a floating point, values less than or equal to –0.5 or greater than or equal to 1.5 will be rejected (e.g. the value of the lgc8 block will not change). Values between –0.5 and 1.5 will be interpreted as ON when greater than or equal to 0.5 and OFF when less than 0.5. May be set to a constant value if not wired. On Output activated Off Output not activated 0 Oper No Oper Off Oper Part No HA028581 R/O Issue 3 Sep-05 Mini8 Controller Engineering Handbook 14.3 Maths Operators Maths Operators (sometimes known as Analogue Operators) allow the controller to perform mathematical operations on two input values. These values can be sourced from any available parameter including Analogue Values, User Values and Digital Values. Each input value can be scaled using a multiplying factor or scalar. The parameters to use, the type of calculation to be performed and the acceptable limits of the calculation are determined in Configuration level. In normal operation the values of each of the scalars may be changed via communications or iTools. There are 24 separate calculations – they do not have to be in sequence. When maths operators are enabled (in Instrument/Options folder) a Folder ‘Math2’ exists (where the 2 denotes two input maths operators). Output Value (result of calculation) Input 1 Input 1 Scalar Math operator Input 2 Input 2 Scalar Figure 14-3: 2 Input Math Operators 8 input multiplexers are also available and are described in section 14.5. Part No HA028581 Issue 3 Sep-05 145 Engineering Handbook Mini8 Controller 14.3.1 Math Operations The following operations can be performed: 0: Off 1: Add 2: Subtract (Sub) 3: Multiply (Mul) 4: Divide (Div) 5: Absolute Difference (AbsDif) 6: Select Max (SelMax) 7: Select Min (SelMin) 8: Hot Swap (HotSwp) 9: Sample and Hold (SmpHld) 10: Power 11: Square Root (Sqrt) 12: Log 13: Ln 14: Exp 15: 10 x 51: Select The selected analogue operator is turned off The output result is the addition of Input 1 and Input 2 The output result is the difference between Input 1 and Input 2 where Input 1 > Input 2 The output result is the Input 1 multiplied by Input 2 The output result is Input 1 divided by Input 2 The output result is the absolute difference between Input 1 and 2 The output result is the maximum of Input 1 and Input 2 The output result is the minimum of Input 1 and Input 2 Input 1 appears at the output provided input 1 is ‘good’. If input 1 is ‘bad’ then input 2 value will appear at the output. An example of a bad input occurs during a sensor break condition. Normally input 1 will be an analogue value and input B will be digital. The output tracks input 1 when input 2 = 1 (Sample). The output will remain at the current value when input 2 = 0 (Hold). If input 2 is an analogue value then any non zero value will be interpreted as ‘Sample’. The output is the value at input 1 raised to the power of the value at input 2. I.e. input 1input 2 The output result is the square root of Input 1. Input 2 has no effect. The output is the logarithm (base 10) of Input 1. Input 2 has no effect The output is the logarithm (base n) of Input 1. Input 2 has no effect The output result is the exponential of Input 1. Input 2 has no effect The output result is 10 raised to the power of Input 1 value. I.e. 10input 1. Input 2 has no effect Select input is used to control which Analogue Input is switched to the output of the Analogue Operator. If the select input is true input 2 is switched through to the output. If false input 1 is switched through to the output. See example below:Select input An input 1 An input 2 Select Logic 1 If Select Input = 1, then An input 2 is selected If Select Input = 0, then An input 1 is selected An Op 1 When Boolean parameters are used as inputs to analogue wiring, they will be cast to 0.0 or 1.0 as appropriate. Values <= -0.5 or >= 1.5 will not be wired. This provides a way to stop a Boolean updating. Analogue wiring (whether simple re-routing or involving calculations) will always output a real type result, whether the inputs were booleans, integers or reals. Note: The numerical value is the value of the enumeration 146 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 14.3.2 Math Operator Parameters Folder – Math2 (2 Input Operators) Sub-Folders: 1 to 24 Name Parameter Description Value Default Access Level Oper To select the type of operator See previous table None Conf In1Mul Scaling factor on input 1 Limited to max float * 1.0 Oper In2 Mul Scaling factor on input 2 Limited to max float * 1.0 Oper Units Units applicable to the output value None AbsTemp V, mV, A, mA, PH, mmHg, psi, Bar, mBar, %RH, %, mmWG, inWG, inWW, Ohms, PSIG, %O2, PPM, %CO2, %CP, %/sec, RelTemp mBar/Pa/T None Conf sec, min, hrs, Resolution Resolution of the output value XXXXX. XXXX.X, XXX.XX, XX.XXX, X.XXXX Conf LowLimit To apply a low limit to the output Conf HighLimit To apply a high limit to the output The state of the Output and Status parameters in case of a fault condition. This parameter could be used in conjunction with fallback value Max float* to High limit (decimal point depends on resolution) Low limit to Max float* (decimal point depends on resolution) Descriptions, see section 3.4.5. Clip Bad Clip Good Fall Bad Fall Good Upscale DownScale Limited to max float * (decimal point depends on resolution) Fallback Fallback Val In1 In2 Out Status Defines (in accordance with Fallback) the output value during fault conditions. Input 1 value (normally wired to an input source – could be a User Value) Input 2 value (normally wired to an input source – could be a User Value) Indicates the analogue value of the output This parameter is used in conjunction with Fallback to indicate the status of the operation. Typically, status is used to flag fault conditions and may be used as an interlock for other operations. Conf Conf Conf Limited to max float * (decimal point depends on resolution) Oper Limited to max float * (decimal point depends on resolution) Oper Between high and low limits R/O Good Bad R/O * Max float in this instrument is +9,999,999,999 Part No HA028581 Issue 3 Sep-05 147 Engineering Handbook Mini8 Controller 14.3.3 Sample and Hold Operation The diagram below shows the operation of the sample and hold feature. 10 5 IP1 0 -5 -10 True False IP2 10 5 Result 0 -5 -10 Figure 14-4: Sample and Hold 148 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 14.4 Multiple Input Operator Block The Multiple Input Operator Block simultaneously outputs the Sum, Average, Minimum and Maximum values of up to 8 valid inputs. The outputs will be clipped to user-defined limits or be replaced by a fallback value based on the selected fallback strategy. Num Casc In Num Valid Ins Casc In In1 In2 Sum MultiOper Min Max In3 Average In4 Input status In5 In6 In7 In8 Units Res’n Out Hi Limit Out Lo Limit Fallback Val Fallback Typ ‘Num In’ determines the number of inputs made available for use. This is settable by the user and is defaulted to two. The user should be careful not to set this number to a value higher than the desired number of inputs as any unused inputs are seen as valid inputs to the block (zero value by default). Num Casc In and Casc In will always be available. ‘Input Status’ gives an indication of the status of the inputs in priority order. Casc In has the highest priority, In1 the next highest up to In8 the lowest. Should more than one input be bad then the input with the highest priority is shown as bad. When the highest priority bad status is cleared the next highest priority bad status is shown. When all inputs are OK a status of OK is shown. ‘Number of valid inputs’ provides a count of the number of inputs used to perform the calculation within the block. This is required for cascaded operation and is detailed below. Part No HA028581 Issue 3 Sep-05 149 Engineering Handbook Mini8 Controller 14.4.1 Cascaded operation Multiple input operator blocks may be cascaded to allow operations on more than eight inputs (33 max for four instances of the block). shows how two blocks should be configured to find the average of more than eight inputs. If required the second block could then be cascaded to a third to provide up to eight more inputs. NumCascIn MultiOper Casc In In1 In2 NumValid Ins NumCascIn Sum Casc In Min In1 Max In2 MultiOper NumValid Ins Sum Min Max Average Average Input status Input status If ‘CascIn’ is has Good status, and ‘NumCascIn’ is not equal to zero we can assume that the block is in cascade and these values are used for calculations within the block, and the value given by ‘NumCascIn’ is added to ‘NumValidIns’. When in cascade the sum, min, max and average outputs treat Casc In as an additional input to the block. For example if Casc In is greater than any number on the rest of the inputs then its value will be output as the max. 14.4.2 Fallback Strategy The user is able to select the fallback strategy during config. The options are:Clip Good The status of the outputs is always good If an output is out of range then it is clipped to limits If all inputs are bad, all outputs = 0 (Or clipped to limits if 0 is not within the output range) Clip Bad The status of all outputs is bad if one or more of the inputs are bad If an output is out of range then it is clipped to limits and the status of that output is set to bad If all inputs are bad, all outputs = 0 and all status’ are set to bad (Or clipped to limits if 0 is not within the output range) Fall Good The status of the outputs is always good If an output is out of range then it is set to the fallback value If all inputs are bad, all outputs = fallback value Fall Bad The status of all outputs is bad if one or more of the inputs are bad If an output is out of range then it is set to the fallback value and the status is set to bad If all inputs are bad, all outputs are set to the fallback value and all statuses are set to bad 150 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 14.4.3 Multiple Input Operator Block Parameters Folder – MultiOper (Multi Operator) Sub-folders: 1 to 4 Name Parameter Description Value Default Access Level NumIn CascNumIn Number of inputs selected to use. Number of cascaded inputs from the previous block The cascaded input from a previous block Input 1 2 to 8 0 to 255 2 0 Config R/O -99999 to 99999 (decimal point depends on Resolution) -99999 to 99999 (decimal point depends on Resolution) Uint8 (nvol) X to X.XXX 0 R/O 0 R/O None X Config Config -99999 to 99999 (decimal point depends on Resolution) -99999 to 99999 (decimal point depends on Resolution) -99999 to 99999 (decimal point depends on Resolution) 0 Config 0 Config 0 Config Clip Good Config 0 R/O 0 R/O 0 R/O 0 R/O 0 R/O 0 R/O CascIn In 1 to In 8 Units Resolution OutHi Limit Selected units for the I/O Selected resolution of the Outputs Upper limit of the outputs. OutLo Limit Lower limit of the outputs. Fallback Val Value to be output depending on Input status and fallback type selected. Fallback Type selected.) Fallback Typ NumValidIn Sum Out Max Out Min Out Average Out Input Status Part No HA028581 Number of inputs used in the calculated outputs (Output) Sum of the valid inputs (Output) Max value of the valid inputs (Output) Min value of the valid inputs (Output) Average value of the valid inputs (Output) Status of the inputs (Output) Issue 3 Sep-05 Clip Bad Clip Good Fall Bad Fall Good Upscale DownScale 2 to 8 See 14.4.2 -99999 to 99999 (decimal point depends on Resolution) -99999 to 99999 (decimal point depends on Resolution) -99999 to 99999 (decimal point depends on Resolution) -99999 to 99999 (decimal point depends on Resolution) -99999 to 99999 (decimal point depends on Resolution) 151 Engineering Handbook Mini8 Controller 14.5 Eight Input Analog Multiplexers The eight Input analogue multiplexers may be used to switch one of eight inputs to an output. It is usual to wire inputs to a source within the controller that selects that input at the appropriate time or event. 14.5.1 Multiple Input Operator Parameters Folder – Mux8 (8 Input Multiplexers) Sub-folders: 1 to 4 Name Parameter Description Value LowLimit The high limit for all inputs and the fall back value. The low limit for all inputs and the fall back value. The state of the Output and Status parameters in case of a fault condition. This parameter could be used in conjunction with Fallback Val. -99999 to High limit (decimal point depends on resolution) Low limit to 99999 (decimal point depends on resolution) Descriptions see section 14.5.1 Clip Bad Clip Good Fall Bad Fall Good Upscale DownScale -99999 to 99999 (decimal point depends on resolution) HighLimit Fallback Fallback Val Select In1 to 8 Out Status Used (in accordance with Fallback) to define the output value during fault conditions Used to select which input value is assigned to the output. Input values (normally wired to an input source) Indicates the analogue value of the output Used in conjunction with Fallback to indicate the status of the operation. Typically, status is used to flag fault conditions and may be used as an interlock for other operations. Default Access Level Conf Conf Conf Conf Input1 to Input8 Oper -99999 to 99999 (decimal point depends on resolution) Between high and low limits Oper Good Bad R/O R/O 14.5.2 Fallback The fallback strategy will come into effect if the status of the input value is bad or if the input value is outside the range of Input Hi and Input Lo. In this case the fallback strategy may be configured as:Fallback Good – the output value will be the fallback value and the output status will be ‘Good’. Fallback Bad – the output value will be the fallback value and the output status will be ‘Bad’. Clip Good – If the input is outside a limit the output will be clipped to the limit and the status will be ‘Good’. Clip Bad – If the input is outside a limit the output will be clipped to the limit and the status will be ‘Bad’. Upscale – the output value will be Output Hi and the output status will be ‘Bad’. Downscale – the output value will be Output Lo and the output status will be ‘Bad’. 152 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 15. Engineering Handbook CHAPTER 15 INPUT CHARACTERISATION 15.1 Input Linearisation The Lin16 function block converts an input signal into an output PV using a series of up to 15 straight lines to characterise the conversion. The function block provides the following behaviour. 1. The Input values must be monotonic and constantly rising. 2. To convert the MV to the PV, the algorithm will search the table of inputs until the matching segment is found. Once found, the points either side will be used to interpolate the output value. 3. If during the search, a point is found which is not above the previous (below for inverted) then the search will be terminated and the segment taken from the last good point to the extreme (In HiOut Hi) see following diagram. Out Hi Terminated search Output 1 ( to 14) Ignored data points Out Lo In Lo Input 1( to 14) In Hi Figure 15-1: Linearisation Example Notes: 1. The linearisation block works on rising inputs/rising outputs or rising inputs/falling outputs. It is not suitable for outputs which rise and fall on the same curve. 2. Input Lo/Output Lo and Input Hi/Output Hi are entered first to define the low and high points of the curve. It is not necessary to define all 15 intermediate points if the accuracy is not required. Points not defined will be ignored and a straight line fit will apply between the last point defined and the Input Hi/Output Hi point. If the input source has a bad status (sensor break, or overrange) then the output value will also have a bad status. Part No HA028581 Issue 3 Sep-05 153 Engineering Handbook 1. 2. 3. Mini8 Controller If the input value is outside the translated range then the output status will indicate Bad, and the value will be limited to the nearest output limit. Out Low Note: Out Low > Out High The units and resolution parameters will be used for the output values. The input values resolution and units will be specified by the source of the wire. First nonmonatonic data point If the ‘Out Low’ is higher than the ‘Out High’ then the translation will be inverted. Ignored data points Terminated search Out High In Low In High Figure 15-2: How an Inverted Curve will Terminate its search when it detects non-monatonic data 15.1.1 Compensation for Sensor Non-Linearities The custom linearisation feature can also be used to compensate for errors in the sensor or measurement system. The intermediate points are, therefore, available in Level 1 so that known discontinuities in the curve can be calibrated out. The diagram below shows an example of the type of discontinuity which can occur in the linearisation of a temperature sensor. Output Hi eg 1000oC Cal Point 6 Output 1 ( to 14) Cal Point 5 Cal Point 4 Cal Point 3 Cal Point 2 Cal Point 1 Input 1 ( to 14) Output Lo eg 0oC Input Hi eg 1000oC Input Lo eg 0oC Figure 15-3: Compensation for Sensor Discontinuities The calibration of the sensor uses the same procedure as described above. Adjust the output (displayed) value against the corresponding input value to compensate for any errors in the standard linearisation of the sensor. 154 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 15.1.2 Input Linearisation Parameters List Folder – Lin16 Sub-folders: 1 to 2 Name Parameter Description Value Default Access Level Units Units of the linearised output None AbsTemp V, mV, A, mA, PH, mmHg, psi, Bar, mBar, %RH, %, mmWG, inWG, inWW, Ohms, PSIG, %O2, PPM, %CO2, %CP, %/sec, RelTemp mBar/Pa/T Resolution Resolution of the output value XXXXX. XXXX.X, XXX.XX, XX.XXX, X.XXXX In Input measurement to linearise. Wire to the source for the custom linearisation Fallback Type The fallback strategy will come into effect if the status of the input value is bad or if the input value is outside the range of input high scale and input low scale. In this case the fallback strategy may be configured as: Between InLowLimit and InHighLimit 0 Oper Clip Bad ClipBad Oper 0 Oper Out If the input is outside a limit the output will be clipped to the limit and the status will be BAD Clip Good If the input is outside a limit the output will be clipped to the limit and the status will be GOOD Fall Bad The output value will be the fallback value and the output status will be BAD Fall Good The output value will be the fallback value and the output status will be GOOD Upscale The output value will be output high scale and the output status will be BAD DownScale The output value will be the output low scale and the output status will be BAD In the event of a bad status, the output may be configured to adopt the fallback value. This allows the strategy to dictate a safe output in the event of a fault being detected. Linearisation Result Between OutLowLimit and OutHighLimit InLowLimit Adjust to the low input value -99999 to InHighLimit 0 Conf OutLowLimit Adjust to correspond to the low input value Adjust to the high input value -99999 to OutHighLimit 0 Conf InLowLimit to 99999 0 Conf OutLowLimit to 99999 0 Conf In1 Adjust to correspond to the high input value Adjust to the first break point 0 Oper Out1 Adjust to correspond to input 1 0 Oper Conf sec, min, hrs, FallbackType Fallback Value InHighLimit OutHighLimit …etc up to Conf R/O 0 In14 Adjust to the last break point 0 Oper Out14 Adjust to correspond to input 14 Status of the block. A value of zero indicates a healthy conversion. 0 Oper Status Good Bad Within operating limits A bad output may be caused by a bad input signal (perhaps the input is in sensor break) or an output which is out of range R/O The 16 point linearisation does not require you to use all 16 points. If fewer points are required, then the curve can be terminated by setting the first unwanted value to be less than the previous point. Part No HA028581 Issue 3 Sep-05 155 Engineering Handbook Mini8 Controller Conversely if the curve is a continuously decreasing one, then it may be terminated by setting the first unwanted point above the previous one. 15.2 Polynomial Folder – Poly Sub-Folders: 1 to 2 Name Parameter Description Value Default Access Level LinType J , K, L, R, B, N, T, S, PL2, C, PT100, Linear, SqRoot J Conf Units To select the input type. The linearisation type selects which of the instruments linearisation curves is applied to the input signal. The instrument contains a number of thermocouple and RTD linearisations as standard. In addition there are a number of custom linearisations that may be downloaded using iTools to provide linearisations of nontemperature sensors. Units of the output None Conf Resolution Resolution of the output value None AbsTemp V, mV, A, mA, PH, mmHg, psi, Bar, mBar, %RH, %, mmWG, inWG, inWW, Ohms, PSIG, %O2, PPM, %CO2, %CP, %/sec, RelTemp mBar/Pa/T sec, min, hrs, XXXXX. XXXX.X, XXX.XX, XX.XXX, X.XXXX XXXXX Conf In Range of the input wired from Out Input Value The input to the linearisation block Output value InHighScale Input high scale In Low to99999 0 Oper InLowScale Input low scale -99999 to In High 0 Oper OutHighScale Output high scale Out Low to 99999 0 Oper OutLowScale Output low scale -99999 to Out High 0 Oper Fallback Type Fallback Type The fallback strategy will come into effect if the status of the input value is bad or if the input value is outside the range of input high scale and input low scale. In this case the fallback strategy may be configured as: Clip Bad Between Out Low and Out High Clip Good Fall Bad Fall Good Upscale 156 Oper R/O If the input is outside a limit the output will be clipped to the limit and the status will be BAD If the input is outside a limit the output will be clipped to the limit and the status will be GOOD The output value will be the fallback value and the output status will be BAD The output value will be the fallback value and the output status will be GOOD The output value will be output high scale and the output status will be BAD Part No HA028581 Issue 3 Conf Sep-05 Mini8 Controller Engineering Handbook Folder – Poly Name Sub-Folders: 1 to 2 Parameter Description Value DownScale FallbackValue Status Value to be adopted by the output in the event of Status = Bad Indicates the status of the linearised output: Default Access Level The output value will be the output low scale and the output status will be BAD Oper Good Bad Good indicates the value is within range and the input is not in sensor break. R/O Indicates the Value is out of range or the input is in sensor break. Note: This is also effected by the configured fallback strategy Part No HA028581 Issue 3 Sep-05 157 Engineering Handbook 16. Mini8 Controller CHAPTER 16 LOAD The load simulation block provides styles of load which can be used to allow an instrument configuration to be tested before connection to the process plant. In the current issue of firmware the simulated loads available are Oven and Furnace. 16.1 Load Parameters Folder – Load Sub-Folders: None Name Parameter Description Value Type Oven Simulates the characteristics of a typical oven Furnace Simulates the characteristics of a typical furnace Resolution The type of load simulation to use. Oven is a simple load of 3 first order lags, providing a single process value for connection to the control loop. Furnace consists of 12 interactive first order lags giving a slave PV, followed by 6 interactive first order lags giving a master PV. The display resolution of the resultant PV Out. Units The Units of the resultant PV. Conf Gain The gain of the load, the input power is multiplied by gain, before use by the load. The time constant of lag 1 in the Oven load and slave lags (1-12) of the Furnace load. The time constant has units of seconds. The time constant of lag 2/3 of the Oven load and master lags (13-18) of the furnace load. Attenuation Between PV1 and PV2 Stages. Used in the advanced furnace load and defines an attenuation factor between the slave and master lags Defines the relative gain when cooling is requested, applied to the input power when the power requested is < 0. The load function block provides 2 PV outputs, sensor fault can be used to generate a fault condition on these PV's such that the bad status is passed along a wire to be consumed by another block such as the loop. The sensor fault can be confiured as: Oper TimeConst1 TimeConst2 Attenuation (Furnace load only) Ch 2 Gain PVFault PV Out1 PV Out2 (Furnace load only) LoopOutCh1 158 Default Access Level Oven Conf Conf Oper Oper Oper Oper None No fault conditions. PVOut1 Fault on the first output (slave). PVOut2 Fault on the second output (master). Both A fault on first and second outputs (master and slave). Oper First Process Value The PV in Process Value an Oven load or the Slave PV in a furnace load. Second Process Value Second process value, lagged from PVOut1, used as a cascade master input. The Master PV in the Furnace load. Loop output channel 1 input. The output of the loop as wired to the load simulation, this is the power requested of the load. This can be used as the heat demand. R/O R/O Oper Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Folder – Load Sub-Folders: None Name Parameter Description LoopOutCh2 Loop output channel 2 input. The output of the loop as wired to the load simulation, this is the power requested of the load. This can be used as the cool demand. Noise Added to PV This is used to make the PV of the load appear noisy, and hence more like a real measurement. Process offset Used to configure an offset in the process. In a temperature application this could represent the ambient operating temperature of the plant. Noise Offset Part No HA028581 Issue 3 Sep-05 Value Default Access Level Oper Off 1 to 99999 The amount of noise is specified in engineering units. Off Oper Oper 159 Engineering Handbook 17. Mini8 Controller CHAPTER 17 CONTROL LOOP SET UP The Mini8 has up to 16 loops of control. Each Loop has two outputs, Channel 1 and Channel 2, each of which can be configured for PID or On/Off. The control function block is divided into a number of sections the parameters of which are all listed under the Folder ‘Loop’. The ‘Loop’ folder contains sub-folders for each section as shown diagrammatically below. 17.1 What is a Control Loop? An example of a heat only temperature control loop is shown below:Control Method PID/OnOff Setpoint Generator Control Output Error Power Regulator Control Loop PV Simplified Control Function Block Process under control Heater Measured temperature Figure 17-1: Single Loop Single Channel The actual temperature measured at the process (PV) is connected to the input of the controller. This is compared with a setpoint (or required) temperature (SP). If there is an error between the set and measured temperature the controller calculates an output value to call for heating or cooling. The calculation depends on the process being controlled but normally uses a PID algorithm. The output(s) from the controller are connected to devices on the plant which cause the heating (or cooling) demand to be adjusted which in turn is detected by the temperature sensor. This is referred to as the control loop. 160 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 17.2 Loop Parameters - Main Folder – Loop.1 to Loop.16 Sub-Folder: Main Name Parameter Description Value AutoMan To select Auto or Manual operation. Auto Man PV Inhibit TargetSP WorkingSP ActiveOut IntHold The process variable input value. This is typically wired from an analogue input. Used to stop the loop controlling. If enabled the loop will stop control and the output of the loop will be set to the safe output value. On exit from inhibit the transfer will be bumpless. This may be wired to an external source The value of setpoint at which the control loop is aiming. It may come from a number of different sources, such as internal SP and remote SP. The current value of the setpoint being used by the control loop. It may come from a number of different sources, such as internal SP and Remote SP. The working setpoint is always read-only as it is derived from other sources. The actual output of the loop before it is split into the channel 1 and channel 2 outputs. Stops Integral action Automatic (closed loop) operation Manual (output power adjusted by the user) operation Default Access Level Auto Oper Range of the input source No Inhibit disabled Yes Inhibit enabled Oper No Oper Between setpoint limits Oper Between setpoint limits R/O R/O No Oper Default Access Level PID Conf Rev Conf Eng Conf 17.3 Loop Set up These parameters configure the type of control. Folder – Loop.1 to Loop.16 Sub-folder: Setup Name Parameter Description Value Ch1 ControlType Selects the channel 1 control algorithm. You may select different algorithms for channels 1 and 2. In temperature control applications, Ch1 is usually the heating channel, Ch2 is the cooling channel. Control type for channel 2 Off Channel turned off OnOff On/off control PID 3 term or PID control Control Action Rev Reverse acting. The output increases when the PV is below SP. This is the best setting for heating control. Dir Direct acting. The output increases when the PV is above SP. This is the best setting for cooling control EngUnits Engineering units eg C or F Percent Per cent of loop span (range Hi Range Lo) Ch2 ControlType Control Action PB Units Part No HA028581 Proportional band units. Issue 3 Sep-05 161 Engineering Handbook Mini8 Controller Folder – Loop.1 to Loop.16 Sub-folder: Setup Name Parameter Description Value Derivative Type Selects whether the derivative acts only on PV changes or on Error (either PV or Setpoint changes). PV Only changes in PV cause changes to the derivative output. Error Changes to either PV or SP will cause a derivative output. Default Access Level PV Conf The above two parameters appear if either Ch1 or Ch2 are configured for PID control 17.3.1 Types of Control Loop 17.3.1.1 On/Off Control On/Off control simply turns heating power on when the PV is below setpoint and off when it is above setpoint. If cooling is used, cooling power is turned on when the PV is above setpoint and off when it is below. The outputs of such a controller will normally be connected to relays – hysteresis may be set as described in the Alarms section to prevent relay chatter or to provide a delay in the control output action. 17.3.1.2 PID Control PID control, also referred to as ‘Three Term Control’, is a technique used to achieve stable straight line control at the required setpoint. The three terms are: P = Proportional band I = Integral time D = Derivative time The output from the controller is the sum of the contributions from these three terms. The combined output is a function of the magnitude and duration of the error signal, and the rate of change of the process value. It is possible to turn off integral and derivative terms and control on only proportional, proportional plus integral or proportional plus derivative. 17.4 PID Control The PID controller consists of the following parameters:- Parameter Proportional Band ‘PB’ 162 Meaning or Function The proportional term, in display units or %, delivers an output that is proportional to the size of the error signal. Integral Time ‘Ti’ Removes steady state control offsets by ramping the output up or down in proportion to the amplitude and duration of the error signal. Derivative Time ‘Td’ Determines how strongly the controller will react to the rate of change in the measured value. It is used to prevent overshoot and undershoot and to restore the PV rapidly if there is a sudden change in demand. High Cutback ‘CBH’ The number of display units, above setpoint, at which the controller will increase the output power, in order to prevent undershoot on cool down. Low Cutback ‘CBL’ The number of display units, below setpoint, at which the controller will cutback the output power, in order to prevent overshoot on heat up. Relative Cool Gain ‘R2G’ Only present if cooling has been configured. Sets the cooling proportional band, which equals the heat proportional band value divided by the cool gain value. Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 17.4.1 Proportional Term The proportional term delivers an output which is proportional to the size of the error signal. An example of this is shown below, for a temperature control loop, where the proportional band is 10OC and an error of 3OC will produce an output of 30%. Output Proportional band 100% 30% 10OC 3OC error 0% Temperature Setpoint Figure 17-2: Proportional Action Proportional only controllers will, in general, provide stable straight line control, but with an offset corresponding to the point at which the output power equals the heat loss from the system. The proportional term may be set in engineering units, as shown in the above example, or as a percentage of the controller range. In the above example, if the inout range is 0 to 1000oC the proportional band is set to 1%. 17.4.2 Integral Term The integral term removes steady state control offset by ramping the output up or down in proportion to the amplitude and duration of the error signal. The ramp rate (reset rate) is the integral time constant, and must be longer than the time constant of the process to avoid oscillations. 17.4.3 Derivative Term The derivative term is proportional to the rate of change of the temperature or process value. It is used to prevent overshoot and undershoot of the setpoint by introducing an anticipatory action. The derivative term has another beneficial effect. If the process value falls rapidly, due, for example, an oven door being opened during operation, and a wide proportional band is set the response of a PI controller can be quite slow. The derivative term modifies the proportional band according to this rate of change having the effect of narrowing the proportional band. Derivative action, therefore, improves the recovery time of a process automatically when the process value changes rapidly. Derivative can be calculated on change of PV or change of Error. For applications such as furnace control, it is common practice to select Derivative on PV to prevent thermal shock caused by a sudden change of output following a change in setpoint. Part No HA028581 Issue 3 Sep-05 163 Engineering Handbook Mini8 Controller 17.4.4 High and Low Cutback While the PID parameters are optimised for steady state control at or near the setpoint, high and low cutback parameters are used to reduce overshoot and undershoot for large step changes in the process. They respectively set the number of degrees above and below setpoint at which the controller will start to increase or cutback the output power. Undershoot Overshoot To reduce the overshoot increase the low cutback value To reduce the undershoot decrease the low cutback value Figure 17-3: High and Low Cutback 17.4.5 Integral action and manual reset In a full three-term controller (that is, a PID controller), the integral term automatically removes steady state errors from the setpoint. If the controller is set as a PD controller, the integral term will be set to ‘OFF’. Under these conditions the measured value may not settle precisely at setpoint. The Manual Reset parameter (M R ) represents the value of the power output that will be delivered when the error is zero. You must set this value manually in order to remove the steady state error. 17.4.6 Relative Cool Gain The gain of channel 2 control output, relative to the channel 1 control output. Relative Ch2 Gain compensates for the different quantities of energy needed to heat, as opposed to that needed to cool, a process. For example: water cooling applications might require a relative cool gain of 4 (cooling is 4 times faster than the heat-up process). (This parameter is set automatically when Autotune is used). A nominal setting of around 4 is often used. 17.4.7 Loop Break Time The loop is considered to be broken if the PV does not respond to a change in the output. Since the time of response will vary from process to process the Loop Break Time parameter allows a time to be set before a loop break alarm is initiated. In these circumstances the output power will drive to high or low limit. For a PID controller, if the PV has not moved by 0.5 x Pb in the loop break time the loop is considered to be in break. The loop break time is set by the Autoune, a typical value is 12 x Td. For an On/Off controller Loop Break Time is not shown and loop break alarm is inhibited. 17.4.8 Cooling Algorithm The method of cooling may vary from application to application. For example, an extruder barrel may be cooled by forced air (from a fan), or by circulating water or oil around a jacket. The cooling effect will be different depending on the method. The cooling algorithm may be set to linear where the controller output changes linearly with the PID demand signal, or it may be set to water, oil or fan where the output changes non-linearly against the PID demand. The algorithm provides optimum performance for these methods of cooling. 164 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 17.4.9 Gain Scheduling Gain scheduling is the automatic transfer of control between one set of PID values and another. It may be used in very non-linear systems where the control process exhibits large changes in response time or sensitivity, see diagram below. This may occur, for example, over a wide range of PV, or between heating and cooling where the rates of response may be significantly different. The number of sets depends on the non-linearity of the system. Each PID set is chosen to operate over a limited (approximately linear) range. In the Mini8 controller, this is done at a preset strategy defined by the parameter ‘Scheduler Type’. The choices are: No. 0 1 2 3 4 5 Type Off Set SP PV Error OP 6 Rem Sched IP Description Just one fixed set of PID values The PID set can be selected manually or from a digital input The transfer between one set and the next depends on the value of the SP The transfer between one set and the next depends on the value of the PV The transfer between one set and the next depends on the value of the error The transfer between one set and the next depends on the value of the OP demand The transfer between one set and the next depends on the value from a remote source for example, a digital input The Mini8 controller has three sets of PID values for each loop – the maximum number, which you may wish to use, is set by ‘Num Sets’ parameter. SP or PV or OP 2 / 3 Boundary 1 / 2 Boundary Controlled Variable PID Set 1 PID Set 2 PID Set 3 Figure 17-4: Gain Scheduling in a Non-Linear System Part No HA028581 Issue 3 Sep-05 165 Engineering Handbook Mini8 Controller 17.4.10 PID Parameters Control loops must be specifically ordered – Order Code MINI8 – 4LP, 8LP or 16LP. To enable a loop place one of the Loop function blocks on the graphical wiring page. Folder – Loop Sub-folders: Loop1.PID to Loop16.PID Name Parameter Description Value SchedulerType To choose the type of gain scheduling Off Set SP PV Error OP Rem Num Sets Scheduler RemoteInput Active Set Boundary 1-2 Boundary 2-3 ProportionalBand 1, 2, 3 IntegralTime 1, 2, 3 DerivativeTime 1, 2, 3 RelCh2Gain 1, 2, 3 CutbackHigh 1, 2, 3 CutbackLow 1, 2, 3 ManualReset 1, 2, 3 LoopBreakTime 1, 2, 3 OutputHi 1, 2, 3 OutputLo 1, 2, 3 166 See above for explanation Default Access Level Off Oper Parameters displayed will vary depending on type of scheduling selected. Selects the number of PID sets to present. Allows the lists to be reduced if the process does not require the full range of PID sets. Scheduler Remote Input 1 to 3 1 Oper 1 to 3 (if SchedulerType is ‘Remote’) 1 R/O Currently working set Set1 Set2 Set3 Set1 R/O except type ’Set’ Sets the level at which PID set 1 changes to PID set 2 Sets the level at which PID set 2 changes to PID set 3 Proportional band Set1/Set2/Set3 Integral term Set1/Set2/Set3 Range units 0 Oper Range units 0 Oper 0 to 99999 Eng units 300 Oper 360s Oper Derivative term Set1/Set2/Set3 60s Oper Relative cool gain Set1/Set2/Set3 Cutback high Set1/Set2/Set3 1 Oper Auto Oper Cutback low Set1/Set2/Set3 Auto Oper Manual reset Set1/Set2/Set3. This must be set to 0.0 when the integral term is set to a value Loop break time Set1/Set2/Set3 0.0 Oper 100 Oper Output High Limit Set1/Set2/Set3 Output Low Limit Set1/Set2/Set3 100 Oper -100 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 17.5 Tuning In tuning, you match the characteristics (PID parameters) of the controller to those of the process being controlled in order to obtain good control. Good control means: Stable, ‘straight-line’ control of the PV at setpoint without fluctuation No overshoot, or undershoot, of the PV setpoint Quick response to deviations from the setpoint caused by external disturbances, thereby rapidly restoring the PV to the setpoint value. Tuning involves calculating and setting the value of the parameters listed in Section 17.4. 17.5.1 Automatic Tuning This controller uses a one-shot tuner that automatically sets up the initial values of the parameters listed in Section 17.4. 17.5.2 One-shot Tuning The ‘one-shot’ tuner works by switching the output on and off to induce an oscillation in the measured value. From the amplitude and period of the oscillation, it calculates the tuning parameter values. If the process cannot tolerate full heating or cooling being applied, then the levels can be restricted by setting the high power limit (‘Output Hi’) and low power limit (‘Output Lo’ ). However, the measured value must oscillate to some degree for the tuner to be able to calculate values. A One-shot Tune can be performed at any time, but normally it is performed only once during the initial commissioning of the process. However, if the process under control subsequently becomes unstable (because its characteristics have changed), you can re-tune again for the new conditions. It is best to start tuning with the process at ambient conditions and with the SP close to the normal operating level. This allows the tuner to calculate more accurately the low cutback and high cutback values which restrict the amount of overshoot, or undershoot. Typical automatic tuning cycle PV Setpoint Autotune starts 1 minute after being turned on to determine steady state conditions. Tuning normally takes place at a PV which has a value of setpoint x 0.7. The power is automatically turned on and off to cause oscillations. From the results the PID, cutback & relative cool values are calculated Time 17.5.3 Calculation of the cutback values Low cutback and High cutback are values that restrict the amount of overshoot, or undershoot, that occur during large step changes in PV (for example, under start-up conditions). If either low cutback, or high cutback, is set to ‘Auto’ the values are fixed at three times the proportional band, and are not changed during automatic tuning. To tune the cutback values, first set them to values other than Auto, and then perform a tune as usual. Part No HA028581 Issue 3 Sep-05 167 Engineering Handbook Mini8 Controller 17.5.4 Manual Tuning If for any reason automatic tuning gives unsatisfactory results, you can tune the controller manually. There are a number of standard methods for manual tuning. The one described here is the Ziegler-Nichols method. With the process at its normal running conditions: Set the Integral Time and the Derivative Time to OFF. Set High Cutback and Low Cutback to ‘Auto’. Ignore the fact that the PV may not settle precisely at the setpoint. If the PV is stable, reduce the proportional band so that the PV just starts to oscillate. If PV is already oscillating, increase the proportional band until it just stops oscillating. Allow enough time between each adjustment for the loop to stabilise. Make a note of the proportional band value ‘PB’ and the period of oscillation ‘T’. Set the proportional band, integral time and derivative time parameter values according to the calculations given in the table below:- Type of control Proportional band (PB) Integral time (Ti) seconds Derivative time (Td) seconds Proportional only 2xPB OFF OFF P + I control 2.2xPB 0.8xT OFF P + I + D control 1.7xPB 0.5xT 0.12xT 17.5.5 Setting the Cutback Values The above procedure sets up the parameters for optimum steady state control. If unacceptable levels of overshoot or undershoot occur during start-up, or for large step changes in PV, then manually set the cutback parameters. Proceed as follows: Set the low and high cutback values to three proportional bandwidths (that is to say, ‘CBH’= ‘CBL’ = 3 x PB). Note the level of overshoot, or undershoot, that occurs for large PV changes (see the diagrams below). In example (a) increase Low Cutback by the undershoot value. In example (b) reduce Low Cutback by the overshoot value. Example (a) Example (b) Where the PV approaches setpoint from above, you can set High Cutback in a similar manner. 168 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 17.5.6 Multi-zone applications. The tuning of one loop can be unduly influenced by the controlling effect of adjacent zone(s). Ideally the zone either side of the one being tuned should be turned OFF, or put in manual with the power level set to keep its temperature at about the usual operating level. 17.5.7 Tune Parameters Folder – Loop.Loop.1 to Loop.16 Sub-folder: Tune Name Parameter Description Value AutoTune Enable To start self tuning Off On OutputHigh Limit Set this to limit the maximum output power level which the controller will supply during the tuning process. If the high output power limit set in the output list is lower the autotune high limit will be clipped to this value. Set this to limit the minimum % output power level which the controller will supply during the tuning process. If the low output power limit set in the output list is higher the autotune low limit will be clipped to this value. Shows if self tuning is in progress OFF R/O Shows the progress of the self tuning Time in the particular stage Reset R/O OutputLow Limit State Stage Stage Time Part No HA028581 Issue 3 Sep-05 Default Access Level Stop Oper Between Low Output and 100.0 !00.0 Oper Between High Output and 0.0 0.0 Oper Stop Start R/O 169 Engineering Handbook Mini8 Controller 17.6 Setpoint Function Block For each of the 16 loops, the controller setpoint is the Working Setpoint that may come from a number of alternative sources. This is the value ultimately used to control the process variable in each loop. The working setpoint may be derived from:1. SP1 or SP2, both of which are individually set, can be selected by an external signal or via the SPSelect parameter over communications. 2. From an external (remote) analogue source 3. The output of a programmer function block and will, therefore, vary in accordance with the program in use. The setpoint function block also provides the facility to limit the rate of change of the setpoint before it is applied to the control algorithm. It will also provide upper and lower limits. These are defined as setpoint limits for the local setpoints and instrument range high and low for other setpoint sources. All setpoints are ultimately subject to a limit of range hi and range lo. User configurable methods for tracking are available, such that the transfer between setpoints and between operational modes will not cause a bump in the setpoint. 17.6.1 Setpoint Function Block PSP High Lim Programmer SP PSP1 PSP2 PSP3 Prog PSP Low Lim Enable Rem SP Range Max Local Local SP2 High Limit Target SP Remote Range Min SP2 SP2 Enab SP2 Low Limit SP1 Enab SP1 High Limit SP1 SP1 Low Limit Trim High Local SP + RemoteTrim + Trim Low Remote only Remote SP Local Trim + Remote Type Remote + Local Trim Other inputs: PV Ramp rate Servo SP changed Range Max Target SP Working SP Ramp Range Min Ramp Status Figure 17-5: Setpoint Function Block 170 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 17.6.2 SP Tracking When setpoint tracking is enabled and the local setpoint is selected, the local setpoint is copied to ‘TrackSP’. Tracking now ensures that the alternate SP follows or tracks this value. When the alternate setpoint is selected it initially takes on the tracked value thus ensuring that no bump takes place. The new setpoint is then adopted gradually. A similar action takes place when returning to the local setpoint. 17.6.3 Manual Tracking When the controller is operating in manual mode the currently selected SP tracks the PV. When the controller resumes automatic control there will be no step change in the resolved SP. 17.6.4 Rate Limit Rate limit will control the rate of change of setpoint. It is enabled by the ‘Rate’ parameter. If this is set to Off then any change made to the setpoint will be effective immediately. If it is set to a value then any change in the setpoint will be effected at the value set in units per minute. Rate limit also acts on SP2 and when switching between SP1 and SP2. When rate limit is active the ‘RateDone’ parameter will display ‘No’. When the setpoint has been reached this parameter will change to ‘Yes’. When ‘Rate’ is set to a value (other than Off) an additional parameter ‘SPRate Disable’ is displayed which allows the setpoint rate limit to be turned off and on without the need to adjust the ‘Rate’ parameter between Off and a value. 17.6.5 Setpoint Parameters Folder – Loop.1 to Loop.16 Sub-folder: SP Name Parameter Description Value Range High Full range of the input type SP Select The Range limits provide a set of absolute maximums and minimums for setpoints within the control loop. Any derived setpoints are ultimately clipped to be within the Range limits. If the Proportional Band is configured as % of Span, the span is derived from the Range limits. Select local or alternate setpoint SP1 Primary setpoint for the controller SP2 Setpoint 2 is the secondary setpoint of the controller. It is often used as a standby setpoint. Maximum limit allowed for the local setpoints Minimum limit allowed for the local setpoints To enable the alternative setpoint to be used. This may be wired to a source such as the programmer Run input. This may be wired to an alternative source such as the programmer or remote setpoint Range Low SP HighLimit SP LowLimit Alt SP Select Alt SP Part No HA028581 Issue 3 Sep-05 Default Access Level Conf Conf SP1 Setpoint 1 SP2 Setpoint 2 Between SP high and SP low limits SP1 Oper Oper Oper Between Range Hi and Range Lo Oper Oper No Alternative setpoint disabled Yes Alternative setpoint enabled Oper Oper 171 Engineering Handbook Mini8 Controller Folder – Loop.1 to Loop.16 Sub-folder: SP Name Parameter Description Value Default Access Level Rate Limits the maximum rate at which the working setpoint can change. The rate limit may be used to protect the load from thermal shock which may be caused by large step changes in setpoint. Flag which indicates when the setpoint is changing or completed Off or 0.1 to 9999.9 engineering units per minute Off Oper Rate Disable Setpoint rate disable SP Trim Trim is an offset added to the setpoint. The trim may be either positive or negative, the range of the trim may be restricted by the trim limits Setpoint trims may be used in a retransmission system. A master zone may retransmit the setpoint to the other zones, a local trim may be applied to each zone to produce a profile along the length of the machine Setpoint trim high limit RateDone SPTrim HighLimit SPTrim LowLimit ManualTrack SP Track Track PV Track SP 172 No Setpoint changing Yes Complete No Enabled Yes Disabled R/O Oper Between SP Trim Hi and SP Trim Lo Oper Oper Setpoint trim low limit To enable manual tracking. When the loop is switched from Manual to Auto, the Setpoint is set to the current PV. This is useful if the load is started in Manual Mode, then later switched to Auto to maintain the operating point. Setpoint tracking ensures bumpless transfer in setpoint when switching between a local and an alternate setpoint such as the programmer. This enables the tracking interface provided by TrackPV and TrackVal, which is used by the programmer and other setpoint providers external to the control loop The programmer tracks the PV when it is servoing or tracking. Manual Tracking Value. The SP to track for manual tracking. Oper Off Manual tracking disabled On Manual tracking enabled Off Setpoint tracking disabled On Setpoint tracking enabled R/O Conf R/O R/O Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 17.7 Output Function Block The output function block allows you to set up output conditions from the control block, such as output limits, hysteresis, output feedforward, behaviour in sensor break, etc. Folder – Loop.1 to Loop.16 Sub-folder: OP Name Parameter Description Value Default Access Level Output High Limit Maximum output power delivered by channels 1 and 2. By reducing the high power limit, it is possible to reduce the rate of change of the process, however, care should be taken as reducing the power limit will reduce the controllers ability to react to disturbance. Minimum (or maximum negative) output power delivered by channels 1 and 2 Channel 1 (Heat) output. The Ch1 output is the positive power values (0 to Output Hi) used by the heat output. Typically this is wired to the control output (time proportioning or DC output). The Ch2 output is negative portion of the control output (0 – Output Lo) for heat/cool applications. It is inverted to be a positive number so that it can be wired into one of the outputs (time proportioning or DC outputs). Ch1/Ch2 Deadband is a gap in percent between output 1 going off and output 2 coming on and vice versa. For on/off control this is taken as a percentage of the hysteresis. Limits the rate at which the output from the PID can change in % change per second. Output rate limit is useful in preventing rapid changes in output from damaging the process or the heater elements. Output rate disable Between Output Lo and 100.0% 100.0 Oper Between Output Hi and -100.0% -100.0 Output Low Limit Ch1 Out Ch2 Out Ch2 DeadBand Rate Rate Disable Ch1 OnOff Hysteresis Ch2 OnOff Hysteresis SensorBreak Mode Safe OP Val SbrkOp Part No HA028581 Channel hysteresis only shown when channel 1 is configured as OnOff. Hysteresis sets the difference between output on and output off to prevent (relay) chatter. Defines the action taken if the Process Variable is bad, i.e. the sensor has failed. This can be configured as hold, in which case the output of the loop is held at its last good value. Alternately the output can switch to a safe output power defined at configuration. Sets the output level to be adopted when loop is inhibited Sets the output level to be adopted when in sensor break condition. Issue 3 Sep-05 Between output Hi and Output Lo R/O Between output Hi and Output Lo R/O Off to 100.0% Off Oper Off to 9999.9 engineering units per minute Off Oper No Enabled Yes Disabled Oper 0.0 to 200.0 10.0 Oper 0.0 to 200.0 10.0 Oper Safe Oper Between output Hi and Output Lo 0 Oper Between output Hi and Output Lo 0 Oper Safe To select the level set by ‘Safe OP’ Hold To hold the current output level at the point when sensor break occurs 173 Engineering Handbook Mini8 Controller Folder – Loop.1 to Loop.16 Sub-folder: OP Name Parameter Description Value Manual Mode Selects the mode of manual operation. Track Step Default In auto the manual output tracks the control output such that a change to manual mode will not result in a bump in the output. Access Level Oper on transition to manual the output will be the manual op value as last set by the operator. ManualOutVal Cool Type The output when the loop is in manual. Note: In manual mode the controller will still limit the maximum power to the power limits, however, it could be dangerous if the instrument is left unattended at a high power setting. It is important that the over range alarms are configured to protect your process. We recommend that all processes are fitted with an independent over range "policeman" Selects the type of cooling channel characterisation to be used. Can be configured as water, oil or fan cooling. Between output Hi and Output Lo R/O Linear Conf Feedforward type The following four parameters appear if FF Type ≠ None None No signal fed forward Remote A remote signal fed forward SP Setpoint fed forward PV PV fed forward Oil Water These are set to match the type of cooling medium applicable to the process Fan FeedForward Type FeedForward Gain FeedForward Offset FeedForward Trim Limit FF_Rem FeedForward Val TrackOutVal Track Enable RemOPL RemOPH 174 Defines the gain of the feedforward value, the feed forward value is multiplied by the gain Defines the offset of the feedforward value this is added to the scaled feedforward. Feedforward trim limits the effect of the PID output. Defines symmetrical limits around the PID output, such that this value is applied to the feedforward signal as a trim. Remote Feedforward signal. Allows an another signal to be used as Feedforward. None Conf Oper Oper This is not affected by FeedForward Gain or Offset R/O The calculated Feedforward Value. Value for the loop output to track when OP Track is Enabled. When enabled, the output of the loop will follow the track output value. The loop will bumplessly return to control when tracking is turned off. Remote output low limit. Can be used to limit the output of the loop from a remote source or calculation. This must always be within the main limits. Remote output high limit Conf R/O Off Disabled On Enabled Oper -100.0 to 100.0 Oper -100.0 to 100.0 Oper Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 17.7.1 Effect of Control Action, Hysteresis and Deadband For temperature control ‘Loop.1.Control Action’ will be set to ‘Reverse’. For a PID controller this means that the heater power decreases as the PV increases. For an on/off controller output 1 (usually heat) will be on (100%) when PV is below the setpoint and output 2 (usually cool) will be on when PV is above the setpoint Hysteresis applies to on/off control only. It defines the difference in temperature between the output switching off and switching back on again. The examples below show the effect in a heat/cool controller. Deadband (Ch2 DeadB) can operate on both on/off control or PID control where it has the effect of widening the period when no heating or cooling is applied. However, in PID control its effect is modified by both the integral and derivative terms. Deadband might be used in PID control, for example, where actuators take time to complete their cycle thus ensuring that heating and cooling are not being applied at the same time. Deadband is likely to be used, therefore, in on/off control only. The second example below adds a deadband of 20 to the above example. HYST.C Heating and Cooling Type both on/off SP 300oC HYST.H Setpoint = 300oC Control Action = reverse Heating Hysteresis = 8oC Cooling Hysteresis = 10oC Deadband = OFF OP1 On Heating 100% No OP OP2 On Cooling 100% Heating off at SP (300oC) Cooling on at SP + HYST.C (310oC) Cooling off at SP (300oC) Heating on at SP – HYST.H (292oC) HYST.C Heating and Cooling Type both on/off D.BAND SP 300oC Setpoint = 300oC HYST.H Control Action = reverse Heating Hysteresis = 8oC Cooling Hysteresis = 10oC Deadband 50% of cooling hysteresis = 5oC OP1 On Heating 100% No OP OP2 On Cooling 100% Power deadband Heating off at SP (300oC) Part No HA028581 Issue 3 Sep-05 Cooling on at SP + HYST.C (310oC) Cooling off at D.BAND (305oC) Heating on at SP – HYST.H (292oC) 175 Engineering Handbook 18. Mini8 Controller SETPOINT PROGRAMMER In a setpoint programmer you can set up a profile in the controller in which the setpoint varies in a predetermined way over a period of time. Temperature is a very common application where it is required to ‘ramp’ the process value from one level to another over a set period of time. The Program is divided into a flexible number of Segments - each being of a single time duration. It is often necessary to switch external devices at particular times during the program. Up to eight digital ‘event’ outputs can be programmed to operate during those segments. An example of a program and two event outputs is shown below. Program PV Segment Segment 1 Time Profile Setpoint Segment 1 Target Start (Run) 1h 2h 3h 4h 5h 6h 7h 8h Time 1 2 8 X Digital Events Figure 18-1: A Setpoint Program 18.1.1 Time to Target Programmer Each segment consists of a single duration parameter and a set of target values for the profiled variables. 1. The duration specifies the time that the segment takes to change the profiled variables from their current values to the new targets. 2. A dwell type segment is set up by leaving the target setpoint at the previous value. 3. A Step type segment is set up by setting the segment time to zero. A program with all segments configured as Time-to-Target is shown below. Setpoint 100 Time Time Time Time 4 min 3 min 4 min 2 min 50 0 Time Figure 18-2: Time to Target Programmer 176 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 18.1.2 Engineering Handbook Ramp Rate Programmer A ramp rate programmer specifies it's ramp segments as maximum setpoint changes per time unit. Each segment can be specified by the operator as Ramp Rate, Dwell or Step. 1. Ramp Rate – the setpoint changes at a rate in units/time 2. Dwell – the time period is set – there is no need to set the target value as this is inherited from the previous segment 3. Step – specify target setpoint only – the controller will use that setpoint when the segment is reached The diagram below shows an example of a ramp rate programmer. Setpoint 100 Ramp Dwell Ramp Ramp 50 0 25 per min 3 min 12.5 per min Figure 18-3: Ramp Rate Programmer 25 min Time 18.2 Mini8 Programmer Block(s) Mini8 Version 2.xx have 8 programmer blocks available. Each of these blocks has one program of up to 16 segments. One block may be wired to all 16 loops or up to 8 loops may have their own programmer block. In this situation Loop 1, Programmer block 1 and program 1 are associated together, Loop 2, Programmer block 2 and program 2 are associated together, and so on up to Loop 8, Programmer block 8 and program 8 being associated together. Mini8 Version 1.xx have a single programmer block. The total number of segments available is 200 or 50 per program and it is possible to store up to 50 separate programs. Parameter tables of this version are included in Appendix D. Note: Version 1.xx Mini8 clone files with programs included will not load correctly into a version 2.xx Mini8. Part No HA028581 Issue 3 Sep-05 177 Engineering Handbook 18.3 Mini8 Controller Segment Types Depending on the type of program configured, a segment may be set as:- 18.3.1 Rate A Ramp segment provides a controlled change of setpoint from an original to a target setpoint. The duration of the ramp is determined by the rate of change specified. Two styles of ramp are possible in the range, Ramp-Rate or Time-To-Target. The segment is specified by the target setpoint and the desired ramp rate. The ramp rate parameter is presented in engineering units (oC, oF, Eng.) per real time units (Seconds, Minutes or Hours). If the units are changed, all ramp rates are re-calculated to the new units and clipped if necessary 18.3.2 Dwell The setpoint remains constant for a specified period at the specified target. The operating setpoint of a dwell is inherited from the previous segment. 18.3.3 Step The setpoint changes instantaneously from its current value to a new value at the beginning of a segment. A Step segment has a minimum duration of 1 second. 18.3.4 Time A time segment defines the duration of the segment. In this case the target setpoint is defined and the time taken to reach this value. A dwell period is set by making the target setpoint the same value as the previous setpoint. 18.3.5 GoBack Go Back allows segments in a program to be repeated a set number of times. The diagram shows an example of a program which is required to repeat the same section a number of times and then continue the program. Segment 1 Segment 2 Segment 7 Segments 3 to 6 At this point Go Back To segment 3 When planning a program it is advisable to ensure that the end and start setpoints of the program are the same otherwise it will step to the different levels. A Go Back segment is defined when editing a program. Segment 6 is defined as a Go Back segment This section is repeated ‘n’ times ‘Goback Seg’ specifies the segment to go back to ‘Goback Cycles’ specifies the number of times the goback loop is executed Overlapping Goback loops are disallowed Note 1. If a second or more ‘Go Back’ segments are created, they cannot return to a segment before the previous ‘Go Back’ segment as shown. In this diagram a Go Back segment can be created from 3 to 2 or 1. Go Back segments can also be created from 7 to 6 or 5 or 4 but not from 7 to 2 or 1 Not allowable OK 1 4 OK 2 3 - Go Back OK OK OK 5 6 7 - Go Back Segments 178 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 18.3.6 Engineering Handbook Wait Wait specifies the criterion for which a segment cannot proceed to the next segment. Any segment can be defined as ‘Wait’ in the ‘Program Edit’ page. The next parameter is then ‘Wait For’ and here you define the criterion. ‘Wait For’ criteria:None No action PrgIn1 Wait until Input 1 is true PrgIn2 Wait until Input 2 is true PrgIn1n2 Wait until Input 1 AND Input 2 are true PrgIn1or2 Wait until Input 1 OR Input 2 is true PVWaitIP Wait until PV has met the criteria against the parameter ‘WaitVal’ as shown: ‘Wait For’ set to ‘PVWaitIP’ PVWait Abs Hi Dev Lo Abs Lo Dev Hi PSP = 100 ‘WaitVal’ = 5 Segment will wait until PVWaitIP >= 5 PVWaitIP >= 95 PVWaitIP <= 5 PVWaitIP <= 105 Example where the temperature must have reached 550 °C before the program continues: This and subsequent screen shots are from the Programmer editor in iTools. Wait segments do not have Events or Holdback. 18.3.7 End A program may contain one End segment. This allows the program to be truncated to the number of segments required. The end segment can be configured to have an indefinite dwell at the last target setpoint or to reset to the start of the program or to go to a defined level of power output (SafeOP). This is selectable by the user. If a number of program cycles are specified for the program, then the End segment is not executed until the last cycle has completed Part No HA028581 Issue 3 Sep-05 179 Engineering Handbook 18.4 Mini8 Controller Output Events Program segments have configurable events. ‘Wait’ ‘GoBack’ and ‘End’ segments do not have events. There are up to 8 digital events, PV Events and Time Events. 18.4.1 Digital Events These are digital flags which can be set on or off for each of the segments. These are enabled by setting Programmer.n.Setup.MaxEvents to the required maximum number of events (>0 and <=8). Clicking the icon on the right in an ‘EventOuts’ cell opens digital events window: In this example Programmer.n.Setup.MaxEvents has been set to 4. Tick the boxes of the outputs that are required. The value shown is the bit mask for the outputs (10 = 2 + 8 I.e. outputs 2 and 4) The EventOuts row above shows this setup for each segment. 180 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 18.4.2 Engineering Handbook PV Event & User Value PV Events are essentially a simplified analogue alarm per segment based on the programmer PV input. For this feature the Programmer.n.Setup.EnablePVEvent must be set to ‘Yes’. The PV Event Output (PVEventOP) may be used to trigger the required response. • Each Segment has one PV Event Type (Off, Hi, Lo, Dev Hi, Dev Lo, Dev Band*) • Each Segment has one PV Threshold * Dev refers to deviation of the PV parameter from Programmer Setpoint (i.e. there is no reference input). If the PVEvent type is set to None in a segment then the User value may be used as a general purpose analogue value per segment. For this feature the Programmer.n.Setup.EnableUValue must be set to ‘Yes’. By default, the parameter is named ‘UserVal’ – it may be renamed in Programmer.n.Setup.UValName. In segment 1 there is no PVEvent so the UserVal may be set but in segment 3 the PVEvent type is not ‘None’ so only the PVThreshold may be set. The event output is Programmer.n.Setup.PVEventOP, the UserVal output is Programmer.n.Setup.UserValOP 18.4.3 Time Event Digital events can simply be the turning on of a digital output for the duration of a segment. An extension of this is the Time Event. For this feature Programmer.n.Setup.MaxEvents must be > 0 and the Programmer.n.Setup.EnableTimeEvent must be set to ‘Yes’. In this case the first digital event Event1 can have a delay (On Time) and an (Off Time) specified. ‘On Time’ defines when the digital output will turn on after the beginning of the segment and ‘Off Time’ defines when the digital output will turn off. The reference point for the On and Off times is the start of the segment. • Only the first digital event Event1 may be configured as a Time Event. • Each segment has one Time Event parameter (OFF, Event1). • The first digital event cannot be set (read only if TimeEvent is not OFF). Part No HA028581 Issue 3 Sep-05 181 Engineering Handbook Mini8 Controller The following example of a timed event in segment 3 shows that Programmer.n.Setup.EventOut1 will be on for 10 minutes during segment 3 starting 10 minutes after segment 3 begins. Editing of the Time Events follows a number of simple rules to make programming easier for the operator these are shown in the 3 diagrams below: Segment 1 TimeEvent = Event1 2 TimeEvent = Off TimeEvent = Event1 TimeEvent = Off OffTime = 0 Event Output OnTime = 0 OffTime = 0 Event Output OnTime = t1 t1 TimeEvent = Off TimeEvent = Event1 OffTime = t2 Event Output t2 OnTime = t1 182 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Segment OffTime 1 TimeEvent = Event1 OffTime * = 0 2 TimeEvent = On OffTime >0 Event Output OnTime=0 OnTime Time Event = Event1 Time Event = Off Time Event = Event1 TimeEvent = Off OffTime Event Output OnTime = 0 OffTime Error : OffTime > segment 1 duration Event Output OnTime • To configure an event which straddles two segments configure Ton in Segment n and Toff in segment n+1. Segment 1 Time Event = Event1 2 Time Event = Off OffTime Error : OnTime = OffTime Event OP = Off OnTime Event Output Off Time Event = Event1 Time Event = Off OffTime Error : OnTime > OffTime Event OP = Off OnTime Event Output Off Time Event = Event1 Time Event = Off OffTime Error : OnTime > seg 1 duration OnTime Event OP = Off Event Output Off OnTime and OffTime are extended by G.Soak periods. If OnTime = 0, the output goes hi at the start of the segment but OffTime is not decremented while Gsoak Wait is applied. Timed event outputs are on a total of Gsoak Wait + (OffTime – OnTime). In the event of a power fail, time events timing will be unaffected. Part No HA028581 Issue 3 Sep-05 183 Engineering Handbook Mini8 Controller 18.5 Holdback Holdback freezes the program if the process value (PV) does not track the setpoint (SP) by more than a user defined amount. The programmer will remain in HOLDBACK until the PV returns to within the requested deviation from setpoint. In a Ramp it indicates that the PV is lagging the SP by more than the set amount and that the program is waiting for the process to catch up. Holdback maintains the correct soak period for the product – see Guaranteed Soak below. Each program can be configured with a holdback value. Each segment determines the holdback function. Holdback will cause the execution time of the program to extend, if the process cannot match the demanded profile. Holdback state will not change access to the parameters. The parameters will behave as if in the RUN state. The diagram below demonstrates that the demanded setpoint (SP) will only change at the rate specified by the program when the PV's deviation is less than the holdback value. When the Deviation between the setpoint and PV is greater than the holdback value (HBk Val) the setpoint ramp will pause until the deviation returns to within the band. The next segment will not start until the deviation between Setpoint and PV is less than the holdback value. Four types of Holdback are available:- 18.5.1 None Holdback is disabled for this segment. High Holdback is entered when the PV is greater than the Setpoint plus HBk Val. Low Holdback is entered when the PV is lower than the Setpoint minus HBk Val. Band Holdback is entered when the PV is either greater than the Setpoint plus HBk Val or lower than the Setpoint minus HBk Val Guaranteed Soak Guaranteed Soak (guaranteed time workpiece stays at SP within a specified tolerance) is achieved in the previous single programmer version by using Holdback Band during a dwell segment. Since only one holdback value per program is available, this imposes a limitation where different tolerance values are required to guarantee the soak. In 2.xx Mini8 Holdback Type in Dwell segments is replaced by a Guaranteed Soak Type (G.Soak) which can be set as Off, Lo, Hi or Band. A Guaranteed Soak Value (G.Soak Val) is available in Dwell segments and this provides the ability to set different values in any Dwell segment. Dwell starts when PV reaches correct value SP/PV PV lags SP. Holdback stops the ramp until SP catches up. Set Holdback Type to low 184 Dwell held if PV falls beyond limits Dwell extended by t1+t2 t2 t1 SP as set in the program PV SP as modified by holdback follows the rate at which the process is capable Part No HA028581 Time Issue 3 Sep-05 Mini8 Controller Engineering Handbook 18.6 PID Select It is possible to set up three sets of PID values, see Chapter 17.4. Any one of these sets may be activated in any segment of the program, except if the segment is configures as Wait, Goback or End. For this feature Programmer.n.Setup.EnablePIDSched must be set to ‘Yes’. The last PID set in the program (SET1 by default) will be applied during these segments. When reset the usual PID strategy for the loop takes over. In the following example the ramp uses PID set 1 and the dwell uses PID set 2. It also shows that the segment 2 dwell guarantees that the PV will be above 595 °C for the full 30 minutes. 18.7 Program Cycles If the Program Cycles parameter is chosen as greater than 1, the program will execute all its segments then repeat from the beginning. The number of cycles is determined by the parameter value. The Program Cycles parameter has a range of 0 to 999 where 0 is enumerated to CONTinuous. 18.7.1 Servo Servo can be set in configuration so that when a program is run the setpoint can start from the initial controller setpoint or from the current process value. Whichever it is, the starting point is called the servo point. This can be set in the program. Servo to PV will produce a smooth and bumpless start to the process. Servo to SP may be used in a Ramp Rate programmer to guarantee the time period of the first segment. (Note: in a Time to Target programmer the segment duration will always be determined by the setting of the Segment Duration parameter.) Part No HA028581 Issue 3 Sep-05 185 Engineering Handbook Mini8 Controller 18.8 Power Fail Recovery In the event of power fail to the Mini8, a strategy may be set in configuration level, which defines how the controller behaves on restoration of the power. The action on power failure is selecte3d using Programmer.n.Setup.PowerFailAct and offers: Ramp Reset Continue This will servo the program setpoint to the measured value (the PV Input parameter value), then return to the target setpoint at the current (or previous) ramp rate. (Default). The setpoint is not allowed to step change the program setpoint. The outputs will take the state of the segment which was active before power was interrupted. See examples below. The process is aborted by resetting the program. All event outputs will take the reset state. The program setpoint returns immediately to its last value prior to the power down. This may cause full power to be applied to the process for a short period to heat the process back to its value prior to the power failure. 18.8.1.1 Ramp (Power fail during Dwell segments.) If the interrupted segment was a Dwell, then the ramp rate will be determined by the previous ramp segment. Setpoint T1 + T2 = segment Dwell time T1 T2 On achieving the Dwell setpoint, the dwell will continue from the point at which the power was interrupted. Note: If a previous ramp segment does not exist, i.e. the first segment of a program is a dwell, then the Dwell will continue at the "servo to PV" setpoint. Power Off Seg n Time Seg n+1 Setpoint 18.8.1.2 Ramp (power fail during Ramp segments) Tgt Setpoint If the interrupted segment was a ramp, then the programmer will servo the program setpoint to the PV, then ramp towards the target setpoint at the previous ramp rate. Previous ramp rate is the ramp rate at power fail. Servo to new PV lev Power Off Time Setpoint 18.8.1.3 Ramp (power fail during Time-to-target segments) Ramp Rate preserved Tgt Setpoint If the programmer was defined as a Time-to-Target programmer then when the power is returned the previous ramp rate will be recovered. The Time remaining will be recalculated. The rule is to maintain RAMP RATE, but alter TIME REMAINING. Servo to PV level Power Off 186 Part No HA028581 Issue 3 Sep-05 Time Mini8 Controller Engineering Handbook 18.9 To Run, Hold or Reset a Program The program is operated via parameters found in the Program Setup lists, Programmer.n.Setup.ProgRun, .ProgReset, .ProgHold, .ProgRunReset and .ProgRunHold. These parameters can be wired to digital inputs or written to over comms. The status of the program is in Program.n.Run.ProgStatus 18.9.1 Run A program will always run – non configured programs will default to a single Dwell end segment. In run the programmer working setpoint varies in accordance with the profile set in the active program. Parameters are Programmer.n.Setup.ProgRun or Programmer.n.Setup.ProgRunReset. ProgRun runs the program when input goes from false to true. ProgRunReset runs the program if true, resets it if false. 18.9.2 Reset In reset the programmer is inactive and the controller behaves as a standard controller. It will:1. Continue to control with the setpoint determined by the next available source, SP1, SP2, Alternative Setpoint. 2. Allow edits to all segments 3. Return all controlled outputs to the configured reset state. Parameters are Programmer.n.Setup.ProgReset or Programmer.n.Setup.ProgRunReset. ProgReset resets the program when input goes from false to true. ProgRunReset resets the program if false, runs it if true. 18.9.3 Hold A programmer may only be placed in Hold from the Run or Holdback state. In hold the setpoint is frozen at the current programmer setpoint and the time remaining parameter frozen at its last value. In this state you can make temporary changes to program parameters such as a target setpoint, ramp rates and times. These changes will only remain effective until the end of the currently running segment, when they will be overwritten by the stored program values. Parameters are Programmer.n.Setup.ProgHold or Programmer.n.Setup.ProgRunHold. ProgHold holds the program when input goes from false to true. ProgRunHold runs the program if true, holds it if false. 18.9.4 Skip segment Skip jumps immediately to the beginning of next segment and starts that segment from the current setpoint value. Parameter is Programmer.n.Setup.SkipSeg and will skip to next segment when input goes from false to true. Part No HA028581 Issue 3 Sep-05 187 Engineering Handbook Mini8 Controller 18.9.5 Advance segment Advance sets the program setpoint equal to the target setpoint and moves to the next segment. Parameter is Programmer.n.Setup.AdvSeg and will advance to next segment when input goes from false to true. 18.9.6 Fast Executes the program at 10x the normal speed. It is provided so that programs can be tested but the process should not be run in this state. Parameter is Programmer.n.Run.FastRun . 18.10 PV Start When Run is initiated PV start (for each channel) allows the program to automatically advance to the correct point in the profile which corresponds to the current PV. For example, if the process is already at PV3 when run is initiated then the program will start from the third segment as shown in the diagram below. Initial PV PV3 Seg 2 PV2 Rising PV Seg 3 Rising PV Seg 1 Rising PV PV1 The user may specify the start point based on a Rising PV as shown in the diagram above or on a Falling PV as shown below depending on type of profile being run. Initial PV PV1 PV2 PV3 Falling PV Falling PV Falling PV When PV Start is used, the program always servos to PV (i.e. servo to SP will be ignored). PV Start is enabled by setting parameter Instrument.Options.ProgPVstart to ‘Yes’. 188 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 18.11 Configuring the Programmer Programmer.n.Setup contains the general configuration settings for the Programmer Block and the parameters used to operate the programmer. Programs are created and stored in the Program Folder. The Programmer status can be viewed using the parameters in the Programmer.n.Run folder. The program can also be operated by setting the Programmer.n.Run.ProgStatus parameter to the required state. Folder – Programmer.1 to .8 Sub-folder: Setup Name Parameter Description Value SyncIn 0 1 Units The synchronise input is a way of synchronising programs. At the end of a segment the programmer will inspect the sync. input, if it is True (1) then the programmer will advance to the next segment. It is typically wired from the end of segment output of another programmer. Only appears if ‘SyncMode’ = ‘Yes’ Units of the Output Resolution Programmer Output resolution RateResolution Default This will normally be wired to the ‘End of Seg’ parameter. Access Level Oper None Conf X to X.XXXX X Conf Ramp Rate Resolution X to X.XXXX X.X Conf PVIn The programmer uses the PV input for a number of functions In holdback, the PV is monitored against the setpoint, and if a deviation occurs the program is paused. The programmer can be configured to start its profile from the current PV value (servo to PV). The programmer monitors the PV value for Sensor Break. The programmer holds in sensor break. Conf SPIn The programmer needs to know the working setpoint of the loop it is trying to control. The SP input is used in the servo to setpoint start type. The transfer of program setpoint to PV Input (normally the Loop PV) or the SP Input (normally the Loop setpoint). Power fail recovery strategy The PV Input is normally wired from the loop TrackPV parameter. Note: This input is automatically wired when the programmer and loop are enabled and there are no existing wires to track interface parameters. Track interface parameters are Programmer.Setup, PVInput, SPInput, Loop.SP, AltSP, Loop.SP, AltSPSelect. SP Input is normally wired from the loop Track SP parameter as the PV input. PV SP See also section 18.1.5. Conf Ramp Reset Cont 1 to 8 See section 18.1.12. Conf Servo PowerFailAct Max Events EnablePVevent EnableTime Part No HA028581 To set the maximum number of output events required for the program. This is for convenience to avoid having to scroll through unwanted events when setting up each segment Enable PV Event provides an alarm facility on Programmer's PVInput. PV Event Type and Threshold are defined in each Segment. Enables the first Event Output to be configured Issue 3 Sep-05 No Yes No Conf Conf No PV Event parameters are listed in the Program Edit page. Conf No 189 Engineering Handbook Mini8 Controller Folder – Programmer.1 to .8 Sub-folder: Setup Name Parameter Description Value Event as a Time Event - each segment may then specify an on and an off time, with respect to the start of the segment, for the event. Yes EnableUserVal Enables a single analogue value to be set in every segment. It is only available if Ch1/Ch2Event = None in the Program Edit page. User Value Name No Yes EnableGsoak Enable Guaranteed soak ensures that the work piece remains at the specified dwell setpoint for a minimum of the specified duration. This parameter is only shown for SyncStart programmers No Yes Enable DelayedStart Enables a time period to be set between starting Run and the program actually running No UValName Yes Enable PID Set Enables PID set. The setting configured in each segment will automatically select the relevant PID Set for the loop wired to the Programmer. Upon completion of the program, PID setting of the loop will be reset to values prior to execution of the program EnableImmPSP Enable immediate PSP Prog Reset Resets program on transition to true No/Yes Prog Run Runs program on transition to true No/Yes Prog Hold Holds program on transition to true No/Yes ProgRunHold Program runs if true Program holds if false ProgRunReset AdvSeg No Default Time Event parameters are listed in the Program Edit page User value not shown User value shown in every segment No guaranteed Guaranteed soak parameters are listed in the Program Edit page for all Dwell segments. The program will run immediately Delayed start is listed in the Program Status page. It is also listed in the pop up associated with the RUN/HOLD key. Each segment uses the same PID values Access Level Conf No Conf UserVal Conf No Conf No Conf No Conf No Yes Oper No Oper No Oper No/Yes No Oper Program runs if true Program holds if false No/Yes No Oper No/Yes Oper No/Yes Oper EventOut1 to 8 Set output to target setpoint and advance to next segment Skip to the next setpoint and start the segment at the current output value. Programmer Digital Input 1 and 2 These are events and can be wired to any parameter. They are used in ‘wait’ segments to prevent the program continuing until the event becomes true Flags showing event states No/Yes R/O End of Seg Flag showing end of segment state No/Yes R/O ProgError Program Error 0 No error 1 Sensor Break 2 Empty Program 3 Overrange R/O SkipSeg PrgIn1 & 2 190 Off/On Can be wired from logic inputs to provide remote program control Used in Wait segment Part No HA028581 off Issue 3 Sep-05 Mini8 Controller Engineering Handbook 18.12 Programmer Run Status The ‘Run’ folder shows the current program status. The program can also be operated by setting the ProgStatus parameter to the required state. Folder – Programmer.1 to .8 Sub-folder: Run Name Parameter Description Value Default Access Level CurProg Current Program Number 1 1 R/O DelayedStart Time for Delayed start. Enabled in Programmer.n.Setup.EnableDelayedStart hh:mm:ss 0 Oper CurrSeg Current Running Segment 1 to 255 1 R/O ProgStatus Program Status Reset – Run – Hold – Holdback – End – End Rate Time Dwell Step Call CurSegType Current Segment type PSP Programmer Setpoint CyclesLeft Number of Cycles Remaining SegTimeLeft Segment Time Remaining Oper End R/O 0 R/O 0 to 1000 0 R/O Hr Min Sec Millisec 0 R/O SegDuration SegTarget Current Target Setpoint Value SegRate Segment Ramp Rate 0.1 to 9999.9 0 R/O ProgTimeLeft Program Time Remaining Hrs Min Sec Millisec 0 R/O Goback CyclesLeft FastRun Fast Run No Oper EndOutput End Output Off R/O EventsOut Event Outputs 0 R/O ResetEventOuts Reset Event Outputs No (0) Normal Yes (1) Program executes at 10 times real time Off (0) Program not in End On (1) Program at End 0 to 255, each bit represents an output. 0 to 255, each bit resets its corresponding output 0 Oper ResetUVal Reset User Value ImmSP Immediate Programmer SP R/O CyclesLeft Part No HA028581 Issue 3 Sep-05 191 Engineering Handbook Mini8 Controller 18.13 Creating a Program A folder exists for each Program containing a few key parameters listed below. This folder would normally be viewed via the iTools Program Editor under the Program Parameters tab. The Program Editor is used to create the segments of Program itself using the Segment Editor tab. Folder – Program Sub-folder: 1 to 50 Name Parameter Description Value Default Access Level Name Program Name Up to 8 characters Null Oper Holdback Value Minimum setting 0 0 Oper Ramp Units Deviation between SP and PV at which holdback is applied. This value applies to the whole program. Time units applied to the segments sec Oper Cycles Number of times the whole program repeats Sec Min Hour Cont (0) 1 to 999 1 Oper Seconds Minutes Hours Repeats continuously Program executes once to 999 times 18.14 Program Editor The Program Editor in iTools provides the method of entering and editing programs directly in the controller. Setpoint programs can be created graphically, stored and downloaded into the controller. From the iTools menu select ‘Program Editor OR Press Figure 18-4: Blank Programmer editor – use 192 to create/edit a Program. or Right Click to add segment Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 18.14.1 Analog View This view is used for editing the analogue setpoints. - 1 in this example. 1. Select a program number using 2. Double click and enter a name for the program - “Example” 3. Double click and enter a name for the TargetSP - “Temperature” 4. Right click in the blank area and choose ‘Add Segment’ Segment Type End Description Ends Program Parameters Reset Rate Ramp at a rate Time Ramp to a target over an interval Soak at a fixed SP Waits for an event Target SP Ramp rate Target SP Duration Duration Wait For Dwell Wait Values Reset – returns to Loop setpoint Dwell – remains at final setpoint SafeOP – goes to SafeOP value SP range 0.1 – 9999.9 SP range hh:mm:ss hh:mm:ss PrgIn1 In 1 PrgIn2 In 2 PrgIn1n2 In1 AND In PrgIn1or2 2 PVWaitIP In1 OR In 2 PV wait 5. Use the drop down to select segment type. Each segment type has the necessary parameters to suit. 6. Right click to insert more segments. End with an ‘End’ segment. Figure 18-5: Spreadsheet Editor with 4 different segment types Part No HA028581 Issue 3 Sep-05 193 Engineering Handbook Mini8 Controller Note PSP1 tab shown in Config mode. This tab displays all the parameters in Programmer.1.Setup folder. With 8 Programmers enabled 8 PSP tabs would be shown. Figure 18-6: PSP tabs 7. Click on ‘EventOuts’ to set up the event outputs for each segment. Note only 4 events have been enabled. Figure 18-7: EventOuts with Out 4 set In the Example program, the dots in EventOuts show which are on in each segment – O/P 1 in segment 1, O/P in segment 2 etc. 194 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 18.14.2 Digital View Alternatively click the icon and the Digital Editor is shown (or hit Cntrl D) Figure 18-8: Digital Editor showing event outputs 8. Once the program is complete it may be saved to file, or loaded to another programmer in this Mini8 or in any other Min8 also connected. 18.14.3 Saving & Loading Programs If you are online to an instrument the program is already ‘loaded’. Use to save it to file. This example would be saved as ‘Example.uip’ and the programs for ALL the enabled programmer blocks will be saved to this file. Part No HA028581 Issue 3 Sep-05 195 Engineering Handbook Use Mini8 Controller to load a set of programs from disk to ALL the programmer blocks. to copy a program from one programmer to another. For this to succeed the source and Use destination programmer blocks must have the same features enabled – i.e. EventsOut, UserVal etc. Firstly select the instrument on the network, COM1.ID001-Mini8 (or any other Mini8 on the network). Then set the target programmer number and click OK. In this case the program in Programmer 1 will be sent to Programmer 2. Note it could be sent to a programmer block in any instrument on the network. 18.14.4 Printing a Program ☺ If you select all segments, Cntrl A (or right click ‘Select All’) and copy spreadsheet cells they are put on the clipboard as tab separated values which can be pasted into Microsoft Excel. There is no direct printing support in the Programmer Editor, but you can generate a report using Microsoft Excel as follows: • Right click on the graph and choose 'Copy Chart'. • Open a new spreadsheet in Excel and paste the chart, position to taste. • Go back to the Programmer Editor and Choose 'Edit|Select All' followed by 'Edit|Copy'. • Switch to Excel, choose the top left cell for the segment data and then choose 'Edit|Paste'. • Optionally delete any columns that have no settings and format the cells. • Print the spreadsheet. The program is listed down rather than across the page so long programs can be printed. 196 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 18.15 Wiring the Programmer Function Block. The Programmer block is invariably used with the Loop blocks. When a programmer block is placed on the graphical wiring editor it will automatically make the essential connections between itself and its associated Loop block i.e. Programmer 1 with Loop1 etc. These connections ensure that the program setpoint goes to the loop and that ‘servo’ and other program options work correctly. Note that for 8 loops & 8 programmers at least 60 wires are required. Figure 18-9: Wiring Programmer to Loop Block When placing a loop block and a programmer block on the graphical wiring editor, if they are the same number (i.e. Loop.1 and Programmer.1), they will automatically wire themselves together as shown. Use this if you require up to 8 loops, each with their own programmer. In the situation where there are multiple programmer blocks, it is possible to synchronise the programmer blocks by wiring the AND of all the ‘Programmer.n.Setup.EndOfSeg’ outputs to all the ‘Programmer.n.Setup.SyncIn’ Inputs. Programmer 1 Programmer 2 Programmer 3 Sync Input Sync Input Sync Input End Of Segment End Of Segment End Of Segment Figure 18-10: Synchronisation of programmer blocks Part No HA028581 Issue 3 Sep-05 197 Engineering Handbook Mini8 Controller If a single programmer block is used, wired to several loops then a plan has to be made about the SP & PV feedback to the programmer block. In the design below the AVERAGE PV of the 3 loops has been used for the PV but for the Setpoint Loop1 has been selected as the ‘master’ and the programmer SP feedback just taken from Loop 1. Figure 18-11: Single Programmer with 3 loops. 198 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 19. Engineering Handbook CHAPTER 19 SWITCH OVER This facility is commonly used in temperature applications which operate over a wide temperature range. A thermocouple may be used to control at lower temperatures and a pyrometer then controls at very high temperatures. Alternatively two thermocouples of different types may be used. The diagram below shows a process heating over time with boundaries which define the switching points between the two devices. The higher boundary (2 to 3) is normally set towards the top end of the thermocouple range and this is determined by the ‘Switch High’ parameter. The lower boundary (1 to 2) is set towards the lower end of the pyrometer (or second thermocouple) range using the parameter ‘Switch Low’. The controller calculates a smooth transition between the two devices. Input 1 Low temperature thermocouple Mini8 Module Input 2 High temperature thermocouple ↑ Controller operates entirely on the higher temperature device ↑ Temperature Boundary 2/3 ←Controller operates on a combination of both devices Boundary 1/2 Controller operates entirely on the lower temperature device ↓ Time → Figure 19-1: Thermocouple to Pyrometer Switching 19.1.1 Example: To Set the Switch Over Levels Set Access to configuration level 1. Open the ‘SwitchOver’ Folder 2. Set ‘SwitchHigh’ to a value which is suitable for the pyrometer (or high temperature thermocouple) to take over the control of the process 3. Set ‘SwitchLow’ to a value which is suitable for the low temperature thermocouple to control the process Part No HA028581 Issue 3 Sep-05 199 Engineering Handbook Mini8 Controller 19.1.2 Switch Over Parameters Folder – SwitchOver Sub-folders: .1 Name Parameter Description Value InHigh Sets the high limit for the switch over block. It is the highest reading from input 2 since it is the high range input sensor. Sets the low limit for the switch over block. It is the lowest reading from input 1 since it is the low range input sensor Defines the high boundary of the switchover region Defines the low boundary of the switchover region. The first input value. This must be the low range sensor. Input range InLow Switch High Switch Low In1 In2 The second input value. This must be the high range sensor Fallback Value In the event of a bad status, the output may be configured to adopt the fallback value. This allows the strategy to dictate a safe output in the event of a fault being detected Fall back type Fallback Type Default Access Level Oper Oper Between Input Hi and Input Lo Oper Oper R/O if wired These will normally be wired to the thermocouple/pyrometer input sources via the PV Input or Analogue Input Module. The range will be the range of the input chosen. R/O if wired Between Input Hi and Input Lo 0.0 Oper Clip Bad Clip Bad Conf Clip Good Fall Bad Fall Good Upscale Downscale SelectIn Indicates which input is currently selected Input 1 0: Input 1 has been selected Input 2 1: Input 2 has been selected R/O 2: Both inputs are used to calculate the output ErrMode The action taken if the selected input is BAD UseGood 0: Assumes the value of a good input Use Conf Good If the currently selected input is BAD the output will assume the value of the other input if it is GOOD ShowBad Out Status Output produced from the 2 input measurements Status of the switchover block 1: If selected input is BAD the output is BAD R/O Good R/O Bad 200 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 20. Engineering Handbook CHAPTER 20 TRANSDUCER SCALING The Mini8 controller includes two transducer calibration function blocks. These are a software function blocks that provide a method of offsetting the calibration of the input when compared to a known input source. Transducer scaling is often performed as a routine operation on a machine to take out system errors. For this reason it can be carried out in operator mode. Transducer scaling can be applied to any TC8 input set up as a linear PV input. They can be wired to the transducer scaling inputs. Three types of calibration are explained in this chapter:• Auto-tare • Load Cell Calibration • Comparison Calibration 20.1 Auto-Tare Calibration The auto-tare function is used, for example, when it is required to weigh the contents of a container but not the container itself. The procedure is to place the empty container on the weigh bridge and ‘zero’ the controller. Since it is likely that following containers may have different tare weights the auto-tare feature is always available. Further parameters are available which are used to pre-configure the tare measurement or for interrogation purposes. Tare calibration may be carried out no matter what type of transducer is in use. New Scale High Tare offset Scale High New Scaling Tare value PV at tare point New Scale Low Scale Low Original Scaling Tare offset Tare offset Input Low Input at autotare point Input High Figure 20-1: Effect of Auto Tare Part No HA028581 Issue 3 Sep-05 201 Engineering Handbook Mini8 Controller 20.2 Load Cell A load cell provides a mV analogue output which may be connected to a linear TC8 input. When no load is placed on the cell the output is normally zero. However, in practice there may be a residual output and this can be calibrated out in the controller. The high end is calibrated by placing a reference weight on the load cell and performing a high end calibration in the controller. 20.3 Comparison Calibration Comparison calibration is used to calibrate the controller against a second reference instrument. The load is removed (or taken to a minimum) from the reference device. The controller low end calibration is done using the ‘Cal Enable’ parameter and entering the reading from the reference instrument. Add a weight and when the reading has become stable select the ‘Cal Hi Enable’ parameter then enter the new reading from the reference instrument. 20.4 Transducer Scaling Parameters Folder – Txdr Sub-folders: .1 or .2 Name Parameter Description Value Cal Type Used to select the type of transducer calibration to perform See descriptions at the beginning of this chapter. 1: Off Transducer type unconfigured 1: Shunt Shunt calibration 2: Load Cell Load Cell 3: Compare Comparison No Not ready Yes Ready Cal Enable Range Max Range Min Start Tare To make the transducer ready for calibration. Must be set to Yes to allow calibration to be done at L1. This includes Tare Cal. The maximum permissible range of the scaling block The minimum permissible range of the scaling block Begin tare calibration Default Access Level Off Conf No Conf Range min to 99999 1000 Conf -19999 to Range max 0 Conf No No Oper if ‘Cal Enable’ = ‘Yes’ No Oper if ‘Cal Enable’ = ‘Yes’ No Oper if ‘Cal Enable’ = ‘Yes’ No Oper Yes Start Cal Start HighCal Clear Cal Tare Value 202 Starts the Calibration process. Note: for Load Cell and Comparison calibration ‘Start Cal’ starts the first calibration point. No For Load Cell and Comparison calibration the ‘Start High Cal’ must be used to start the second calibration point. No Clears the current calibration constants. This returns the calibration to unity gain No Yes Yes Yes Start tare calibration Start calibration Start high calibration To delete previous calibration values Enter the tare value of the container Conf Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Folder – Txdr Sub-folders: .1 or .2 Name Parameter Description InHigh Sets the scaling input high point Oper InLow Sets the scaling input low point Oper Scale High Sets the scaling output high point. Usually the same as the ‘Input Lo’ Sets the scaling output low point. Usually 80% of ‘Input Hi’ The calibration algorithms use the threshold to determine if the value has settled. When switching in the shunt resistor, the algorithm waits for the value to settle to within the threshold before starting the high calibration point. The adjust is used in the Comparison Calibration method. Oper Scale Low Cal Band CalAdjust ShuntOut Cal Active Indicates when the internal shunt calibration resistor is switched in. Only appears if ‘Cal Type’ = ‘Shunt’ Indicates calibration taking place InVal The input value to be scaled. OutVal The Input Value is scaled by the block to produce the Output Value The status of the output accounting for sensor fail signals passed to the block and the state of the scaling. Indicates the progress of calibration Status Cal Status Part No HA028581 Issue 3 Sep-05 Value Default Access Level Oper Conf When edited, the Adjust parameter can be set to the desired value. On confirm, the new adjust value is used to set the scaling constants Oper Off Resistor not switched in Oper On Resistor switched in Off Inactive On Active -9999.9 to 9999.9 R/O Oper Oper Good Conf Bad 0: Idle No calibration in progress 1: Active Calibration in progress 2: Passed Calibration Passed 3: Failed Calibration Failed L1 R/O 203 Engineering Handbook Mini8 Controller 20.4.1 Parameter Notes Enable Cal This may be wired to a digital input for an external switch. If not wired, then the value may be changed. When enabled the transducer parameters may be altered as described in the previous sections. When the parameter has been turned On it will remain on until turned off manually even if the controller is powered cycled. This may be wired to a digital input for an external switch. If not wired, then the value may be changed. This may be wired to a digital input for an external switch. If not wired, then the value may be changed. It starts the calibration procedure for: Shunt Calibration The low point for Load Cell Calibration The low point for Comparison Calibration This may be wired to a digital input for an external switch. If not wired, then the value may be changed. It starts:The high point for Load Cell Calibration The high point for Comparison Calibration This may be wired to a digital input for an external switch. If not wired, then the value may be changed. When enabled the input will reset to default values. A new calibration will overwrite the previous calibration values if Clear Cal is not enabled between calibrations. Start Tare Start Cal Start Hi Cal Clear Cal 20.4.2 Tare Calibration The Mini8 controller has an auto-tare function that is used, for example, when it is required to weigh the contents of a container but not the container itself. The procedure is to place the empty container on the weighbridge and ‘zero’ the controller. The procedure is as follows:- 204 1. Place container on weighbridge 2. Go to Txdr.1 (or .2) Folder. 3. Transducer calibration Type must be ‘Load Cell’. 4. CalEnable must be set to ‘Yes’. 5. Set StartTare to ‘yes’ 6. The controller automatically calibrates the to the tare weight which is measured by the transducer and stores this value. 7. During this measurement Cal Status will show progress. If the cal fails it is probably an ‘out of range’ problem. Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 20.4.3 Load Cell A load cell output must be within the range 0 to 77 mV to go into a TC8 input. Use a shunt for mA inputs, mV can possibly go direct, Volt inputs must use a potential divider. To calibrate a load cell. 1. Remove all load from the transducer to establish a zero reference. 2. Go to Txdr.1 (or .2) Folder. 3. Transducer calibration Type must be ‘Load Cell’. 4. CalEnable must be set to ‘Yes’. 5. Set Start Cal to ‘yes’ 6. The controller will calibrate the low point. 7. Set StartHighCal to ‘yes’ 8. The controller will calibrate the high point. Cal Status advises progress and result. 20.4.4 Comparison Calibration Comparison calibration is used to calibrate the input against a second reference instrument. Typically this might be a local display on the weighing device itself. To calibrate against a known reference source:1. Add a load at the low end of the scale range 2. Go to Txdr.1 (or .2) Folder. 3. Transducer calibration Type must be ‘Comparision’. 4. CalEnable must be set to ‘Yes’. 5. Enter the reading from the reference instrument into ‘Cal Adjust’. 6. Add a load at the high end of the scale. 7. Set StartHighCal to ‘yes’ 8. The controller will calibrate the high point. Cal Status advises progress and result. Part No HA028581 Issue 3 Sep-05 205 Engineering Handbook 21. Mini8 Controller CHAPTER 21 USER VALUES User values are registers provided for use in calculations. They may be used as constants in equations or temporary storage in extended calculations. Up to 32 User Values are available. They are arranged in 4 groups of 8. Each User Value can then be set up in the ‘UserVal’ folder. 21.1 User Value Parameters Folder – UsrVal Sub-Folders: .1 to .32 Name Parameter Description Value Units Units assigned to the User Value None Abs Temp oC/oF/oK, V, mV, A, mA, PH, mmHg, psi, Bar, mBar, %RH, %, mmWG, inWG, inWW, Ohms, PSIG, %O2, PPM, %CO2, %CP, %/sec, RelTemp oC\oF\oK(rel), Custom 1, Custom 2, Custom 3, Custom 4, Custom 5, Custom 6, sec, min, hrs, Conf Resolution Resolution of the User Value XXXXX to X.XXXX Conf High Limit The high limit may be set for each user value to prevent the value being set to an out-ofbounds value. The low limit of the user value may be set to prevent the user value from being edited to an illegal value. This is important if the user value is to be used as a setpoint. To set the value within the range limits Can be used to force a good or bad status onto a user value. This is useful for testing status inheritance and fallback strategies. Low Limit Val Status Default Access Level Oper Oper See note 1 Good Oper See note 1 Oper Bad Note 1. If ‘Val’ is wired into but ‘Status’ is not, then, instead of being used to force the Status it will indicate the status of the value as inherited form the wired connection to ‘Val’. 206 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 22. Engineering Handbook CHAPTER 22 CALIBRATION In this chapter calibration refers to calibration of the inputs of the TC4 / TC8 modules and the RT4 module. Calibration is accessed using the ‘Cal State’ parameter that is only available in configuration level. Since the controller is calibrated during manufacture to traceable standards for every input range, it is not necessary to calibrate the controller when changing ranges. Furthermore, a continuous automatic check and correction of the calibration during the controllers’ normal operation means that it is calibrated for life. However, it is recognised that, for operational reasons, it may be a requirement to check or re-calibrate the controller. This new calibration is saved as a User Calibration. It is always possible to revert to the factory calibration if necessary. ☺ Tip: Consider using the ‘Offset’ parameter for User Cal (e.g. Mod.1.Offset). This can be set to correct any measured difference between the Mini8 given PV and a calibration value obtained from another source. This is useful where the process setpoint remains at about the same value during use. Alternatively, if the setpoint range is wide use the two point calibration with the ‘LoPoint’, ‘LoOffset’, and ‘HiPoint’, ‘HiOffset’ parameters. 22.1 TC4 / TC8 User calibration 22.1.1 Set Up No pre-calibration warm-up is required. As calibration is a single-point on 8 channels, quick enough (a few minutes) to avoid self-heating effects, there are no special environmental, mounting position or ventilation requirements for calibration. Calibration should be performed at a reasonable ambient temperature (15oC to 35oC). Calibration outside these limits will compromise the expected working accuracy. Every channel of every TC8 card must be individually connected to the calibrator source using thick copper wire (so the sensor-break voltage drop in the wires and source impedance is minimal). The voltage source, monitor DVM and the target Mini8 should be at the same temperature (to eliminate added series e.m.f. due to thermocouple effects). The Mini8 must be in Configuration Mode. 22.1.2 Zero Calibration No “zero” calibration point is required for TC4/TC8 input channels 22.1.3 Voltage Calibration 1. 2. 3. 4. Set the Calibrator voltage source to an accurate 50.005mV. (The extra 5uV is to compensate for selfheating tempco effect). Connect the 50mV to channel 1 Set Mod.1.CalState to HiCal (23) and then select ‘Confirm’ When complete set CalState to SaveUser(25) Exit configuration mode. 22.1.4 CJC Calibration No CJC calibration required; the sampled values are ratio metric, providing uncalibrated uncertainty of ±1oC. 22.1.5 Sensor-Break Limit Check Apply a 900Ω resistor to each channel in turn, Sensor Break Type to ‘Low’, filter to off (0). Verify the SBrkValue is greater than 24.0 and less than 61.0 Part No HA028581 Issue 3 Sep-05 207 Engineering Handbook Mini8 Controller 22.2 To Return to TC4/TC8 Factory Calibration To clear the User calibration and restore the calibration from the factory. 1. Put Mini8 into Configuration Mode 2. Set the ‘Mod.1.Calibration State’ to LoadFact (24). 3. Return Instrument to Operating Mode. 22.3 RT4 User calibration 22.3.1 Set Up No pre-calibration warm-up is required. There are no special environmental, mounting position or ventilation requirements for calibration. Calibration should be performed at a reasonable ambient temperature (15oC to 35oC). Calibration outside these limits will compromise the expected working accuracy. Each channel of the RT4 card must be individually connected to the calibrated resistance box using the 4 wire connection. The Mini8 must be in Configuration Mode. 22.3.2 Calibration 1. 2. 3. 4. 5. 6. 7. Wire the resistance box to channel 1 using the four wire connection. Set the Resistance box to 150.0 ohms ±0.02%. Set Mod.1.CalState to LoCal (42) and then select ‘Confirm’ When complete set CalState to SaveUser(45) Set the Resistance box to 400.0 ohms ±0.02%. Set Mod.1.CalState to HiCal (43) and then select ‘Confirm’ When complete set CalState to SaveUser(45) Exit configuration mode. 22.4 To Return to RT4 Factory Calibration To clear the User calibration and restore the calibration from the factory. 208 4. Put Mini8 into Configuration Mode 5. Set the ‘Mod.1.Calibration State’ to LoadFact (44). 6. Return Instrument to Operating Mode. Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 22.5 Calibration Parameters List Header - IO Sub-headers: Mod.1 to Mod.32 Name Parameter Description Value Cal State Calibration state of the input Idle Hi-50mV Load Fact Save User Confirm Go Busy Passed Failed Status PV Status The current status of the PV. 0 1 2 3 4 5 6 Normal operation High input calibration for mV ranges Restore factory calibration values Save the new calibration values To start the calibration procedure when one of the above has been selected Starting the automatic calibration procedure Calibration in progress Calibration successful Calibration unsuccessful Normal operation Initial startup mode Input in sensor break PV outside operating limits Saturated input Uncalibrated channel No Module Default Access Level Idle Conf R/O The above list shows the values of CalState, which appear during a normal calibration procedure. The full list of possible values follows – the number is the enumeration for the parameter. 1: Idle 2: Low calibration point for Volts range 3: High calibration point for Volts range 4: Calibration restored to factory default values 5: User calibration stored 6: Factory calibration stored 11: Idle 12: Low calibration point for HZ input 13: High calibration point for the HZ input 14: Calibration restored to factory default values 15: User calibration stored 16: Factory calibration stored 20: Calibration point for factory rough calibration 21: Idle 22: Low calibration point for the mV range 23: Hi calibration point for the mV range 24: Calibration restored to factory default values 25: User calibration stored 26: Factory calibration stored 30: Calibration point for factory rough calibration 31: Idle 32: Low calibration point for the mV range 33: High calibration point for the mV range 34: Calibration restored to factory default values Part No HA028581 Issue 3 Sep-05 35: User calibration stored 36: Factory calibration stored 41: Idle 42: Low calibration point for RTD calibration (150 ohms) 43: Low calibration point for RTD calibration (400 ohms) 44: Calibration restored to factory default values 45: User calibration stored 46: Factory calibration stored 51: Idle 52: CJC calibration used in conjunction with Term Temp parameter 54: Calibration restored to factory default values 55: User calibration stored 56: Factory calibration stored 200: Confirmation of request to calibrate 201: Used to start the calibration procedure 202: Used to abort the calibration procedure 210: Calibration point for factory rough calibration 212: Indication that calibration is in progress 213: Used to abort the calibration procedure 220: Indication that calibration completed successfully 221: Calibration accepted but not stored 222: Used to abort the calibration procedure 223: Indication that calibration failed 209 Engineering Handbook 23. Mini8 Controller APPENDIX A MODBUS SCADA TABLE These parameters are single register Modbus values for use with Third Party Modbus masters in SCADA packages or plcs. Scaling of the parameters has to be configured – the Modbus master scaling has to match the Mini8 parameter resolution to ensure the decimal point is in the correct position. 23.1 Comms Table The tables that follow do not include every parameter in the Mini8. The Comms Table is used to make most parameters available at any SCADA address. Folder – Commstab Sub-folders: .1 to .250 Name Parameter Description Value Default Access Level Destination Modbus Destination Not used Conf Source Source Parameter Not Used 1 to 16011 Taken from source parameter Native Native Data Format Integer Conf ReadOnly Read Only Read/Write only if source is R/W Minutes Units in which time is scaled. 0 Integer 1 Native (i.e. Float or long) 0 Read/Write 1 Read Only 0 Seconds 1 Minutes R/W Conf Seconds. Conf Minutes Conf Entering a value in the Source parameter may be done in two ways: 1 - drag the required parameter into the Source 2 - right click the Source parameter, select Edit Wire and browse to the required parameter. In the Example below the PV of Loop 1 would be available at addresses 200 and 201 as a two register floating point number - its native data type. There are 250 comms table entries available. 23.2 SCADA Table The parameters in the tables following are available in scaled integer format, accessed via their associated Modbus address. Wherever possible use an OPC client with the iTools OPCserver as the server. In this arrangement the parameters are all referenced by name and the values are floating point so the decimal point for all parameters is inherited. 210 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Parameter Description / Modbus address Access.CustomerID Access.InstrumentMode Alarm.1.Ack Alarm.1.Block Alarm.1.Delay Alarm.1.Hysteresis Alarm.1.Inhibit Alarm.1.Latch Alarm.1.Out Alarm.1.Reference Alarm.1.Threshold Alarm.1.Type Alarm.2.Ack Alarm.2.Block Alarm.2.Delay Alarm.2.Hysteresis Alarm.2.Inhibit Alarm.2.Latch Alarm.2.Out Alarm.2.Reference Alarm.2.Threshold Alarm.2.Type Alarm.3.Ack Alarm.3.Block Alarm.3.Delay Alarm.3.Hysteresis Alarm.3.Inhibit Alarm.3.Latch Alarm.3.Out Alarm.3.Reference Alarm.3.Threshold Alarm.3.Type Alarm.4.Ack Alarm.4.Block Alarm.4.Delay Alarm.4.Hysteresis Alarm.4.Inhibit Alarm.4.Latch Alarm.4.Out Alarm.4.Reference Alarm.4.Threshold Alarm.4.Type Alarm.5.Ack Alarm.5.Block Alarm.5.Delay Alarm.5.Hysteresis Alarm.5.Inhibit Alarm.5.Latch Alarm.5.Out Alarm.5.Reference Alarm.5.Threshold Alarm.5.Type Alarm.6.Ack Alarm.6.Block Alarm.6.Delay Alarm.6.Hysteresis Alarm.6.Inhibit Alarm.6.Latch Alarm.6.Out Alarm.6.Reference Alarm.6.Threshold Alarm.6.Type Alarm.7.Ack Part No HA028581 Issue 3 Sep-05 DEC 4739 199 10250 10246 10248 10242 10247 10244 10249 10243 10241 10240 10266 10262 10264 10258 10263 10260 10265 10259 10257 10256 10282 10278 10280 10274 10279 10276 10281 10275 10273 10272 10298 10294 10296 10290 10295 10292 10297 10291 10289 10288 10314 10310 10312 10306 10311 10308 10313 10307 10305 10304 10330 10326 10328 10322 10327 10324 10329 10323 10321 10320 10346 HEX 1283 00C7 280A 2806 2808 2802 2807 2804 2809 2803 2801 2800 281A 2816 2818 2812 2817 2814 2819 2813 2811 2810 282A 2826 2828 2822 2827 2824 2829 2823 2821 2820 283A 2836 2838 2832 2837 2834 2839 2833 2831 2830 284A 2846 2848 2842 2847 2844 2849 2843 2841 2840 285A 2856 2858 2852 2857 2854 2859 2853 2851 2850 286A Parameter Description / Modbus address Alarm.7.Block Alarm.7.Delay Alarm.7.Hysteresis Alarm.7.Inhibit Alarm.7.Latch Alarm.7.Out Alarm.7.Reference Alarm.7.Threshold Alarm.7.Type Alarm.8.Ack Alarm.8.Block Alarm.8.Delay Alarm.8.Hysteresis Alarm.8.Inhibit Alarm.8.Latch Alarm.8.Out Alarm.8.Reference Alarm.8.Threshold Alarm.8.Type Alarm.9.Ack Alarm.9.Block Alarm.9.Delay Alarm.9.Hysteresis Alarm.9.Inhibit Alarm.9.Latch Alarm.9.Out Alarm.9.Reference Alarm.9.Threshold Alarm.9.Type Alarm.10.Ack Alarm.10.Block Alarm.10.Delay Alarm.10.Hysteresis Alarm.10.Inhibit Alarm.10.Latch Alarm.10.Out Alarm.10.Reference Alarm.10.Threshold Alarm.10.Type Alarm.11.Ack Alarm.11.Block Alarm.11.Delay Alarm.11.Hysteresis Alarm.11.Inhibit Alarm.11.Latch Alarm.11.Out Alarm.11.Reference Alarm.11.Threshold Alarm.11.Type Alarm.12.Ack Alarm.12.Block Alarm.12.Delay Alarm.12.Hysteresis Alarm.12.Inhibit Alarm.12.Latch Alarm.12.Out Alarm.12.Reference Alarm.12.Threshold Alarm.12.Type Alarm.13.Ack Alarm.13.Block Alarm.13.Delay Alarm.13.Hysteresis DEC 10342 10344 10338 10343 10340 10345 10339 10337 10336 10362 10358 10360 10354 10359 10356 10361 10355 10353 10352 10378 10374 10376 10370 10375 10372 10377 10371 10369 10368 10394 10390 10392 10386 10391 10388 10393 10387 10385 10384 10410 10406 10408 10402 10407 10404 10409 10403 10401 10400 10426 10422 10424 10418 10423 10420 10425 10419 10417 10416 10442 10438 10440 10434 211 HEX 2866 2868 2862 2867 2864 2869 2863 2861 2860 287A 2876 2878 2872 2877 2874 2879 2873 2871 2870 288A 2886 2888 2882 2887 2884 2889 2883 2881 2880 289A 2896 2898 2892 2897 2894 2899 2893 2891 2890 28AA 28A6 28A8 28A2 28A7 28A4 28A9 28A3 28A1 28A0 28BA 28B6 28B8 28B2 28B7 28B4 28B9 28B3 28B1 28B0 28CA 28C6 28C8 28C2 Engineering Handbook Parameter Description / Modbus address Alarm.13.Inhibit Alarm.13.Latch Alarm.13.Out Alarm.13.Reference Alarm.13.Threshold Alarm.13.Type Alarm.14.Ack Alarm.14.Block Alarm.14.Delay Alarm.14.Hysteresis Alarm.14.Inhibit Alarm.14.Latch Alarm.14.Out Alarm.14.Reference Alarm.14.Threshold Alarm.14.Type Alarm.15.Ack Alarm.15.Block Alarm.15.Delay Alarm.15.Hysteresis Alarm.15.Inhibit Alarm.15.Latch Alarm.15.Out Alarm.15.Reference Alarm.15.Threshold Alarm.15.Type Alarm.16.Ack Alarm.16.Block Alarm.16.Delay Alarm.16.Hysteresis Alarm.16.Inhibit Alarm.16.Latch Alarm.16.Out Alarm.16.Reference Alarm.16.Threshold Alarm.16.Type Alarm.17.Ack Alarm.17.Block Alarm.17.Delay Alarm.17.Hysteresis Alarm.17.Inhibit Alarm.17.Latch Alarm.17.Out Alarm.17.Reference Alarm.17.Threshold Alarm.17.Type Alarm.18.Ack Alarm.18.Block Alarm.18.Delay Alarm.18.Hysteresis Alarm.18.Inhibit Alarm.18.Latch Alarm.18.Out Alarm.18.Reference Alarm.18.Threshold Alarm.18.Type Alarm.19.Ack Alarm.19.Block Alarm.19.Delay Alarm.19.Hysteresis Alarm.19.Inhibit Alarm.19.Latch Alarm.19.Out 212 Mini8 Controller DEC 10439 10436 10441 10435 10433 10432 10458 10454 10456 10450 10455 10452 10457 10451 10449 10448 10474 10470 10472 10466 10471 10468 10473 10467 10465 10464 10490 10486 10488 10482 10487 10484 10489 10483 10481 10480 10506 10502 10504 10498 10503 10500 10505 10499 10497 10496 10522 10518 10520 10514 10519 10516 10521 10515 10513 10512 10538 10534 10536 10530 10535 10532 10537 HEX 28C7 28C4 28C9 28C3 28C1 28C0 28DA 28D6 28D8 28D2 28D7 28D4 28D9 28D3 28D1 28D0 28EA 28E6 28E8 28E2 28E7 28E4 28E9 28E3 28E1 28E0 28FA 28F6 28F8 28F2 28F7 28F4 28F9 28F3 28F1 28F0 290A 2906 2908 2902 2907 2904 2909 2903 2901 2900 291A 2916 2918 2912 2917 2914 2919 2913 2911 2910 292A 2926 2928 2922 2927 2924 2929 Parameter Description / Modbus address Alarm.19.Reference Alarm.19.Threshold Alarm.19.Type Alarm.20.Ack Alarm.20.Block Alarm.20.Delay Alarm.20.Hysteresis Alarm.20.Inhibit Alarm.20.Latch Alarm.20.Out Alarm.20.Reference Alarm.20.Threshold Alarm.20.Type Alarm.21.Ack Alarm.21.Block Alarm.21.Delay Alarm.21.Hysteresis Alarm.21.Inhibit Alarm.21.Latch Alarm.21.Out Alarm.21.Reference Alarm.21.Threshold Alarm.21.Type Alarm.22.Ack Alarm.22.Block Alarm.22.Delay Alarm.22.Hysteresis Alarm.22.Inhibit Alarm.22.Latch Alarm.22.Out Alarm.22.Reference Alarm.22.Threshold Alarm.22.Type Alarm.23.Ack Alarm.23.Block Alarm.23.Delay Alarm.23.Hysteresis Alarm.23.Inhibit Alarm.23.Latch Alarm.23.Out Alarm.23.Reference Alarm.23.Threshold Alarm.23.Type Alarm.24.Ack Alarm.24.Block Alarm.24.Delay Alarm.24.Hysteresis Alarm.24.Inhibit Alarm.24.Latch Alarm.24.Out Alarm.24.Reference Alarm.24.Threshold Alarm.24.Type Alarm.25.Ack Alarm.25.Block Alarm.25.Delay Alarm.25.Hysteresis Alarm.25.Inhibit Alarm.25.Latch Alarm.25.Out Alarm.25.Reference Alarm.25.Threshold Alarm.25.Type Part No HA028581 Issue 3 DEC 10531 10529 10528 10554 10550 10552 10546 10551 10548 10553 10547 10545 10544 10570 10566 10568 10562 10567 10564 10569 10563 10561 10560 10586 10582 10584 10578 10583 10580 10585 10579 10577 10576 10602 10598 10600 10594 10599 10596 10601 10595 10593 10592 10618 10614 10616 10610 10615 10612 10617 10611 10609 10608 10634 10630 10632 10626 10631 10628 10633 10627 10625 10624 Sep-05 HEX 2923 2921 2920 293A 2936 2938 2932 2937 2934 2939 2933 2931 2930 294A 2946 2948 2942 2947 2944 2949 2943 2941 2940 295A 2956 2958 2952 2957 2954 2959 2953 2951 2950 296A 2966 2968 2962 2967 2964 2969 2963 2961 2960 297A 2976 2978 2972 2977 2974 2979 2973 2971 2970 298A 2986 2988 2982 2987 2984 2989 2983 2981 2980 Mini8 Controller Engineering Handbook Parameter Description / Modbus address Alarm.26.Ack Alarm.26.Block Alarm.26.Delay Alarm.26.Hysteresis Alarm.26.Inhibit Alarm.26.Latch Alarm.26.Out Alarm.26.Reference Alarm.26.Threshold Alarm.26.Type Alarm.27.Ack Alarm.27.Block Alarm.27.Delay Alarm.27.Hysteresis Alarm.27.Inhibit Alarm.27.Latch Alarm.27.Out Alarm.27.Reference Alarm.27.Threshold Alarm.27.Type Alarm.28.Ack Alarm.28.Block Alarm.28.Delay Alarm.28.Hysteresis Alarm.28.Inhibit Alarm.28.Latch Alarm.28.Out Alarm.28.Reference Alarm.28.Threshold Alarm.28.Type Alarm.29.Ack Alarm.29.Block Alarm.29.Delay Alarm.29.Hysteresis Alarm.29.Inhibit Alarm.29.Latch Alarm.29.Out Alarm.29.Reference Alarm.29.Threshold Alarm.29.Type Alarm.30.Ack Alarm.30.Block Alarm.30.Delay Alarm.30.Hysteresis Alarm.30.Inhibit Alarm.30.Latch Alarm.30.Out Alarm.30.Reference Alarm.30.Threshold Alarm.30.Type Alarm.31.Ack Alarm.31.Block Alarm.31.Delay Alarm.31.Hysteresis Alarm.31.Inhibit Alarm.31.Latch Alarm.31.Out Alarm.31.Reference Alarm.31.Threshold Alarm.31.Type Alarm.32.Ack Alarm.32.Block Alarm.32.Delay Part No HA028581 Issue 3 Sep-05 DEC 10650 10646 10648 10642 10647 10644 10649 10643 10641 10640 10666 10662 10664 10658 10663 10660 10665 10659 10657 10656 10682 10678 10680 10674 10679 10676 10681 10675 10673 10672 10698 10694 10696 10690 10695 10692 10697 10691 10689 10688 10714 10710 10712 10706 10711 10708 10713 10707 10705 10704 10730 10726 10728 10722 10727 10724 10729 10723 10721 10720 10746 10742 10744 HEX 299A 2996 2998 2992 2997 2994 2999 2993 2991 2990 29AA 29A6 29A8 29A2 29A7 29A4 29A9 29A3 29A1 29A0 29BA 29B6 29B8 29B2 29B7 29B4 29B9 29B3 29B1 29B0 29CA 29C6 29C8 29C2 29C7 29C4 29C9 29C3 29C1 29C0 29DA 29D6 29D8 29D2 29D7 29D4 29D9 29D3 29D1 29D0 29EA 29E6 29E8 29E2 29E7 29E4 29E9 29E3 29E1 29E0 29FA 29F6 29F8 Parameter Description / Modbus address Alarm.32.Hysteresis Alarm.32.Inhibit Alarm.32.Latch Alarm.32.Out Alarm.32.Reference Alarm.32.Threshold Alarm.32.Type AlmSummary.General.AnAlarmStatus1 AlmSummary.General.AnAlarmStatus2 AlmSummary.General.AnAlarmStatus3 AlmSummary.General.AnAlarmStatus4 AlmSummary.General.AnyAlarm AlmSummary.General.CTAlarmStatus1 AlmSummary.General.CTAlarmStatus2 AlmSummary.General.CTAlarmStatus3 AlmSummary.General.CTAlarmStatus4 AlmSummary.General.DigAlarmStatus1 AlmSummary.General.DigAlarmStatus2 AlmSummary.General.DigAlarmStatus3 AlmSummary.General.DigAlarmStatus4 AlmSummary.General.GlobalAck AlmSummary.General.NewAlarm AlmSummary.General.NewCTAlarm AlmSummary.General.RstNewAlarm AlmSummary.General.RstNewCTAlarm AlmSummary.General.SBrkAlarmStatus1 AlmSummary.General.SBrkAlarmStatus2 AlmSummary.General.SBrkAlarmStatus3 AlmSummary.General.SBrkAlarmStatus4 Comms.FC.Ident DigAlarm.1.Ack DigAlarm.1.Block DigAlarm.1.Delay DigAlarm.1.Inhibit DigAlarm.1.Latch DigAlarm.1.Out DigAlarm.1.Type DigAlarm.2.Ack DigAlarm.2.Block DigAlarm.2.Delay DigAlarm.2.Inhibit DigAlarm.2.Latch DigAlarm.2.Out DigAlarm.2.Type DigAlarm.3.Ack DigAlarm.3.Block DigAlarm.3.Delay DigAlarm.3.Inhibit DigAlarm.3.Latch DigAlarm.3.Out DigAlarm.3.Type DigAlarm.4.Ack DigAlarm.4.Block DigAlarm.4.Delay DigAlarm.4.Inhibit DigAlarm.4.Latch DigAlarm.4.Out DigAlarm.4.Type DigAlarm.5.Ack DigAlarm.5.Block DigAlarm.5.Delay DigAlarm.5.Inhibit DigAlarm.5.Latch DEC HEX 10738 29F2 10743 29F7 10740 29F4 10745 29F9 10739 29F3 10737 29F1 10736 29F0 10176 27C0 10177 27C1 10178 27C2 10179 27C3 10213 27E5 4192 1060 4193 1061 4194 1062 4195 1063 10188 27CC 10189 27CD 10190 27CE 10191 27CF 10214 27E6 10212 27E4 4196 1064 10215 27E7 4197 1065 10200 27D8 10201 27D9 10202 27DA 10203 27DB 12963 32A3 11274 2C0A 11270 2C06 11272 2C08 11271 2C07 11268 2C04 11273 2C09 11264 2C00 11290 2C1A 11286 2C16 11288 2C18 11287 2C17 11284 2C14 11289 2C19 11280 2C10 11306 2C2A 11302 2C26 11304 2C28 11303 2C27 11300 2C24 11305 2C29 11296 2C20 11322 2C3A 11318 2C36 11320 2C38 11319 2C37 11316 2C34 11321 2C39 11312 2C30 11338 2C4A 11334 2C46 11336 2C48 11335 2C47 11332 2C44 213 Engineering Handbook Parameter Description / Modbus address DigAlarm.5.Out DigAlarm.5.Type DigAlarm.6.Ack DigAlarm.6.Block DigAlarm.6.Delay DigAlarm.6.Inhibit DigAlarm.6.Latch DigAlarm.6.Out DigAlarm.6.Type DigAlarm.7.Ack DigAlarm.7.Block DigAlarm.7.Delay DigAlarm.7.Inhibit DigAlarm.7.Latch DigAlarm.7.Out DigAlarm.7.Type DigAlarm.8.Ack DigAlarm.8.Block DigAlarm.8.Delay DigAlarm.8.Inhibit DigAlarm.8.Latch DigAlarm.8.Out DigAlarm.8.Type DigAlarm.9.Ack DigAlarm.9.Block DigAlarm.9.Delay DigAlarm.9.Inhibit DigAlarm.9.Latch DigAlarm.9.Out DigAlarm.9.Type DigAlarm.10.Ack DigAlarm.10.Block DigAlarm.10.Delay DigAlarm.10.Inhibit DigAlarm.10.Latch DigAlarm.10.Out DigAlarm.10.Type DigAlarm.11.Ack DigAlarm.11.Block DigAlarm.11.Delay DigAlarm.11.Inhibit DigAlarm.11.Latch DigAlarm.11.Out DigAlarm.11.Type DigAlarm.12.Ack DigAlarm.12.Block DigAlarm.12.Delay DigAlarm.12.Inhibit DigAlarm.12.Latch DigAlarm.12.Out DigAlarm.12.Type DigAlarm.13.Ack DigAlarm.13.Block DigAlarm.13.Delay DigAlarm.13.Inhibit DigAlarm.13.Latch DigAlarm.13.Out DigAlarm.13.Type DigAlarm.14.Ack DigAlarm.14.Block DigAlarm.14.Delay DigAlarm.14.Inhibit DigAlarm.14.Latch 214 Mini8 Controller DEC 11337 11328 11354 11350 11352 11351 11348 11353 11344 11370 11366 11368 11367 11364 11369 11360 11386 11382 11384 11383 11380 11385 11376 11402 11398 11400 11399 11396 11401 11392 11418 11414 11416 11415 11412 11417 11408 11434 11430 11432 11431 11428 11433 11424 11450 11446 11448 11447 11444 11449 11440 11466 11462 11464 11463 11460 11465 11456 11482 11478 11480 11479 11476 HEX 2C49 2C40 2C5A 2C56 2C58 2C57 2C54 2C59 2C50 2C6A 2C66 2C68 2C67 2C64 2C69 2C60 2C7A 2C76 2C78 2C77 2C74 2C79 2C70 2C8A 2C86 2C88 2C87 2C84 2C89 2C80 2C9A 2C96 2C98 2C97 2C94 2C99 2C90 2CAA 2CA6 2CA8 2CA7 2CA4 2CA9 2CA0 2CBA 2CB6 2CB8 2CB7 2CB4 2CB9 2CB0 2CCA 2CC6 2CC8 2CC7 2CC4 2CC9 2CC0 2CDA 2CD6 2CD8 2CD7 2CD4 Parameter Description / Modbus address DigAlarm.14.Out DigAlarm.14.Type DigAlarm.15.Ack DigAlarm.15.Block DigAlarm.15.Delay DigAlarm.15.Inhibit DigAlarm.15.Latch DigAlarm.15.Out DigAlarm.15.Type DigAlarm.16.Ack DigAlarm.16.Block DigAlarm.16.Delay DigAlarm.16.Inhibit DigAlarm.16.Latch DigAlarm.16.Out DigAlarm.16.Type DigAlarm.17.Ack DigAlarm.17.Block DigAlarm.17.Delay DigAlarm.17.Inhibit DigAlarm.17.Latch DigAlarm.17.Out DigAlarm.17.Type DigAlarm.18.Ack DigAlarm.18.Block DigAlarm.18.Delay DigAlarm.18.Inhibit DigAlarm.18.Latch DigAlarm.18.Out DigAlarm.18.Type DigAlarm.19.Ack DigAlarm.19.Block DigAlarm.19.Delay DigAlarm.19.Inhibit DigAlarm.19.Latch DigAlarm.19.Out DigAlarm.19.Type DigAlarm.20.Ack DigAlarm.20.Block DigAlarm.20.Delay DigAlarm.20.Inhibit DigAlarm.20.Latch DigAlarm.20.Out DigAlarm.20.Type DigAlarm.21.Ack DigAlarm.21.Block DigAlarm.21.Delay DigAlarm.21.Inhibit DigAlarm.21.Latch DigAlarm.21.Out DigAlarm.21.Type DigAlarm.22.Ack DigAlarm.22.Block DigAlarm.22.Delay DigAlarm.22.Inhibit DigAlarm.22.Latch DigAlarm.22.Out DigAlarm.22.Type DigAlarm.23.Ack DigAlarm.23.Block DigAlarm.23.Delay DigAlarm.23.Inhibit DigAlarm.23.Latch Part No HA028581 Issue 3 DEC 11481 11472 11498 11494 11496 11495 11492 11497 11488 11514 11510 11512 11511 11508 11513 11504 11530 11526 11528 11527 11524 11529 11520 11546 11542 11544 11543 11540 11545 11536 11562 11558 11560 11559 11556 11561 11552 11578 11574 11576 11575 11572 11577 11568 11594 11590 11592 11591 11588 11593 11584 11610 11606 11608 11607 11604 11609 11600 11626 11622 11624 11623 11620 Sep-05 HEX 2CD9 2CD0 2CEA 2CE6 2CE8 2CE7 2CE4 2CE9 2CE0 2CFA 2CF6 2CF8 2CF7 2CF4 2CF9 2CF0 2D0A 2D06 2D08 2D07 2D04 2D09 2D00 2D1A 2D16 2D18 2D17 2D14 2D19 2D10 2D2A 2D26 2D28 2D27 2D24 2D29 2D20 2D3A 2D36 2D38 2D37 2D34 2D39 2D30 2D4A 2D46 2D48 2D47 2D44 2D49 2D40 2D5A 2D56 2D58 2D57 2D54 2D59 2D50 2D6A 2D66 2D68 2D67 2D64 Mini8 Controller Engineering Handbook Parameter Description / Modbus address DigAlarm.23.Out DigAlarm.23.Type DigAlarm.24.Ack DigAlarm.24.Block DigAlarm.24.Delay DigAlarm.24.Inhibit DigAlarm.24.Latch DigAlarm.24.Out DigAlarm.24.Type DigAlarm.25.Ack DigAlarm.25.Block DigAlarm.25.Delay DigAlarm.25.Inhibit DigAlarm.25.Latch DigAlarm.25.Out DigAlarm.25.Type DigAlarm.26.Ack DigAlarm.26.Block DigAlarm.26.Delay DigAlarm.26.Inhibit DigAlarm.26.Latch DigAlarm.26.Out DigAlarm.26.Type DigAlarm.27.Ack DigAlarm.27.Block DigAlarm.27.Delay DigAlarm.27.Inhibit DigAlarm.27.Latch DigAlarm.27.Out DigAlarm.27.Type DigAlarm.28.Ack DigAlarm.28.Block DigAlarm.28.Delay DigAlarm.28.Inhibit DigAlarm.28.Latch DigAlarm.28.Out DigAlarm.28.Type DigAlarm.29.Ack DigAlarm.29.Block DigAlarm.29.Delay DigAlarm.29.Inhibit DigAlarm.29.Latch DigAlarm.29.Out DigAlarm.29.Type DigAlarm.30.Ack DigAlarm.30.Block DigAlarm.30.Delay DigAlarm.30.Inhibit DigAlarm.30.Latch DigAlarm.30.Out DigAlarm.30.Type DigAlarm.31.Ack DigAlarm.31.Block DigAlarm.31.Delay DigAlarm.31.Inhibit DigAlarm.31.Latch DigAlarm.31.Out DigAlarm.31.Type DigAlarm.32.Ack DigAlarm.32.Block DigAlarm.32.Delay DigAlarm.32.Inhibit DigAlarm.32.Latch Part No HA028581 Issue 3 Sep-05 DEC 11625 11616 11642 11638 11640 11639 11636 11641 11632 11658 11654 11656 11655 11652 11657 11648 11674 11670 11672 11671 11668 11673 11664 11690 11686 11688 11687 11684 11689 11680 11706 11702 11704 11703 11700 11705 11696 11722 11718 11720 11719 11716 11721 11712 11738 11734 11736 11735 11732 11737 11728 11754 11750 11752 11751 11748 11753 11744 11770 11766 11768 11767 11764 HEX 2D69 2D60 2D7A 2D76 2D78 2D77 2D74 2D79 2D70 2D8A 2D86 2D88 2D87 2D84 2D89 2D80 2D9A 2D96 2D98 2D97 2D94 2D99 2D90 2DAA 2DA6 2DA8 2DA7 2DA4 2DA9 2DA0 2DBA 2DB6 2DB8 2DB7 2DB4 2DB9 2DB0 2DCA 2DC6 2DC8 2DC7 2DC4 2DC9 2DC0 2DDA 2DD6 2DD8 2DD7 2DD4 2DD9 2DD0 2DEA 2DE6 2DE8 2DE7 2DE4 2DE9 2DE0 2DFA 2DF6 2DF8 2DF7 2DF4 Parameter Description / Modbus address DigAlarm.32.Out DigAlarm.32.Type Humidity.DewPoint Humidity.DryTemp Humidity.Pressure Humidity.PsychroConst Humidity.RelHumid Humidity.Resolution Humidity.SBrk Humidity.WetOffset Humidity.WetTemp Instrument.Diagnostics.CntrlOverrun Instrument.Diagnostics.ErrCount Instrument.Diagnostics.PSUident Instrument.InstInfo.CompanyID Instrument.InstInfo.InstType Instrument.InstInfo.Version Instrument.Options.Units IO.CurrentMonitor.Config.CalibrateCT1 IO.CurrentMonitor.Config.CalibrateCT2 IO.CurrentMonitor.Config.CalibrateCT3 IO.CurrentMonitor.Config.Commission IO.CurrentMonitor.Config.CommissionStatus IO.CurrentMonitor.Config.CT1Range IO.CurrentMonitor.Config.CT1Resolution IO.CurrentMonitor.Config.CT2Range IO.CurrentMonitor.Config.CT2Resolution IO.CurrentMonitor.Config.CT3Range IO.CurrentMonitor.Config.CT3Resolution IO.CurrentMonitor.Config.Inhibit IO.CurrentMonitor.Config.Interval IO.CurrentMonitor.Config.Load1CTInput IO.CurrentMonitor.Config.Load1DrivenBy IO.CurrentMonitor.Config.Load1OCFthreshold IO.CurrentMonitor.Config.Load1PLFthreshold IO.CurrentMonitor.Config.Load1Resolution IO.CurrentMonitor.Config.Load2CTInput IO.CurrentMonitor.Config.Load2DrivenBy IO.CurrentMonitor.Config.Load2OCFthreshold IO.CurrentMonitor.Config.Load2PLFthreshold IO.CurrentMonitor.Config.Load2Resolution IO.CurrentMonitor.Config.Load3CTInput IO.CurrentMonitor.Config.Load3DrivenBy IO.CurrentMonitor.Config.Load3OCFthreshold IO.CurrentMonitor.Config.Load3PLFthreshold IO.CurrentMonitor.Config.Load3Resolution IO.CurrentMonitor.Config.Load4CTInput IO.CurrentMonitor.Config.Load4DrivenBy IO.CurrentMonitor.Config.Load4OCFthreshold IO.CurrentMonitor.Config.Load4PLFthreshold IO.CurrentMonitor.Config.Load4Resolution IO.CurrentMonitor.Config.Load5CTInput IO.CurrentMonitor.Config.Load5DrivenBy IO.CurrentMonitor.Config.Load5OCFthreshold IO.CurrentMonitor.Config.Load5PLFthreshold IO.CurrentMonitor.Config.Load5Resolution IO.CurrentMonitor.Config.Load6CTInput IO.CurrentMonitor.Config.Load6DrivenBy IO.CurrentMonitor.Config.Load6OCFthreshold IO.CurrentMonitor.Config.Load6PLFthreshold IO.CurrentMonitor.Config.Load6Resolution IO.CurrentMonitor.Config.Load7CTInput IO.CurrentMonitor.Config.Load7DrivenBy DEC 11769 11760 13317 13318 13313 13315 13316 13320 13314 13312 13319 4737 4736 13027 121 122 107 4738 4170 4171 4172 4096 4097 4103 4198 4104 4199 4105 4200 4099 4098 4107 4106 4109 4108 4201 4111 4110 4113 4112 4202 4115 4114 4117 4116 4203 4119 4118 4121 4120 4204 4123 4122 4125 4124 4205 4127 4126 4129 4128 4206 4131 4130 215 HEX 2DF9 2DF0 3405 3406 3401 3403 3404 3408 3402 3400 3407 1281 1280 32E3 0079 007A 006B 1282 104A 104B 104C 1000 1001 1007 1066 1008 1067 1009 1068 1003 1002 100B 100A 100D 100C 1069 100F 100E 1011 1010 106A 1013 1012 1015 1014 106B 1017 1016 1019 1018 106C 101B 101A 101D 101C 106D 101F 101E 1021 1020 106E 1023 1022 Engineering Handbook Parameter Description / Modbus address IO.CurrentMonitor.Config.Load7OCFthreshold IO.CurrentMonitor.Config.Load7PLFthreshold IO.CurrentMonitor.Config.Load7Resolution IO.CurrentMonitor.Config.Load8CTInput IO.CurrentMonitor.Config.Load8DrivenBy IO.CurrentMonitor.Config.Load8OCFthreshold IO.CurrentMonitor.Config.Load8PLFthreshold IO.CurrentMonitor.Config.Load8Resolution IO.CurrentMonitor.Config.Load9CTInput IO.CurrentMonitor.Config.Load9DrivenBy IO.CurrentMonitor.Config.Load9OCFthreshold IO.CurrentMonitor.Config.Load9PLFthreshold IO.CurrentMonitor.Config.Load9Resolution IO.CurrentMonitor.Config.Load10CTInput IO.CurrentMonitor.Config.Load10DrivenBy IO.CurrentMonitor.Config.Load10OCFthreshold IO.CurrentMonitor.Config.Load10PLFthreshold IO.CurrentMonitor.Config.Load10Resolution IO.CurrentMonitor.Config.Load11CTInput IO.CurrentMonitor.Config.Load11DrivenBy IO.CurrentMonitor.Config.Load11OCFthreshold IO.CurrentMonitor.Config.Load11PLFthreshold IO.CurrentMonitor.Config.Load11Resolution IO.CurrentMonitor.Config.Load12CTInput IO.CurrentMonitor.Config.Load12DrivenBy IO.CurrentMonitor.Config.Load12OCFthreshold IO.CurrentMonitor.Config.Load12PLFthreshold IO.CurrentMonitor.Config.Load12Resolution IO.CurrentMonitor.Config.Load13CTInput IO.CurrentMonitor.Config.Load13DrivenBy IO.CurrentMonitor.Config.Load13OCFthreshold IO.CurrentMonitor.Config.Load13PLFthreshold IO.CurrentMonitor.Config.Load13Resolution IO.CurrentMonitor.Config.Load14CTInput IO.CurrentMonitor.Config.Load14DrivenBy IO.CurrentMonitor.Config.Load14OCFthreshold IO.CurrentMonitor.Config.Load14PLFthreshold IO.CurrentMonitor.Config.Load14Resolution IO.CurrentMonitor.Config.Load15CTInput IO.CurrentMonitor.Config.Load15DrivenBy IO.CurrentMonitor.Config.Load15OCFthreshold IO.CurrentMonitor.Config.Load15PLFthreshold IO.CurrentMonitor.Config.Load15Resolution IO.CurrentMonitor.Config.Load16CTInput IO.CurrentMonitor.Config.Load16DrivenBy IO.CurrentMonitor.Config.Load16OCFthreshold IO.CurrentMonitor.Config.Load16PLFthreshold IO.CurrentMonitor.Config.Load16Resolution IO.CurrentMonitor.Config.MaxLeakPh1 IO.CurrentMonitor.Config.MaxLeakPh2 IO.CurrentMonitor.Config.MaxLeakPh3 IO.CurrentMonitor.Status.Load1Current IO.CurrentMonitor.Status.Load2Current IO.CurrentMonitor.Status.Load3Current IO.CurrentMonitor.Status.Load4Current IO.CurrentMonitor.Status.Load5Current IO.CurrentMonitor.Status.Load6Current IO.CurrentMonitor.Status.Load7Current IO.CurrentMonitor.Status.Load8Current IO.CurrentMonitor.Status.Load9Current IO.CurrentMonitor.Status.Load10Current IO.CurrentMonitor.Status.Load11Current IO.CurrentMonitor.Status.Load12Current 216 Mini8 Controller DEC 4133 4132 4207 4135 4134 4137 4136 4208 4139 4138 4141 4140 4209 4143 4142 4145 4144 4210 4147 4146 4149 4148 4211 4151 4150 4153 4152 4212 4155 4154 4157 4156 4213 4159 4158 4161 4160 4214 4163 4162 4165 4164 4215 4167 4166 4169 4168 4216 4100 4101 4102 4173 4174 4175 4176 4177 4178 4179 4180 4181 4182 4183 4184 HEX 1025 1024 106F 1027 1026 1029 1028 1070 102B 102A 102D 102C 1071 102F 102E 1031 1030 1072 1033 1032 1035 1034 1073 1037 1036 1039 1038 1074 103B 103A 103D 103C 1075 103F 103E 1041 1040 1076 1043 1042 1045 1044 1077 1047 1046 1049 1048 1078 1004 1005 1006 104D 104E 104F 1050 1051 1052 1053 1054 1055 1056 1057 1058 Parameter Description / Modbus address IO.CurrentMonitor.Status.Load13Current IO.CurrentMonitor.Status.Load14Current IO.CurrentMonitor.Status.Load15Current IO.CurrentMonitor.Status.Load16Current IO.CurrentMonitor.Status.Ph1AllOff IO.CurrentMonitor.Status.Ph2AllOff IO.CurrentMonitor.Status.Ph3AllOff IO.Mod.1.AlarmAck IO.Mod.1.HiOffset IO.Mod.1.HiPoint IO.Mod.1.LoOffset IO.Mod.1.LoPoint IO.Mod.1.MinOnTime IO.Mod.1.PV IO.Mod.2.AlarmAck IO.Mod.2.HiOffset IO.Mod.2.HiPoint IO.Mod.2.LoOffset IO.Mod.2.LoPoint IO.Mod.2.MinOnTime IO.Mod.2.PV IO.Mod.3.AlarmAck IO.Mod.3.HiOffset IO.Mod.3.HiPoint IO.Mod.3.LoOffset IO.Mod.3.LoPoint IO.Mod.3.MinOnTime IO.Mod.3.PV IO.Mod.4.AlarmAck IO.Mod.4.HiOffset IO.Mod.4.HiPoint IO.Mod.4.LoOffset IO.Mod.4.LoPoint IO.Mod.4.MinOnTime IO.Mod.4.PV IO.Mod.5.AlarmAck IO.Mod.5.HiOffset IO.Mod.5.HiPoint IO.Mod.5.LoOffset IO.Mod.5.LoPoint IO.Mod.5.MinOnTime IO.Mod.5.PV IO.Mod.6.AlarmAck IO.Mod.6.HiOffset IO.Mod.6.HiPoint IO.Mod.6.LoOffset IO.Mod.6.LoPoint IO.Mod.6.MinOnTime IO.Mod.6.PV IO.Mod.7.AlarmAck IO.Mod.7.HiOffset IO.Mod.7.HiPoint IO.Mod.7.LoOffset IO.Mod.7.LoPoint IO.Mod.7.MinOnTime IO.Mod.7.PV IO.Mod.8.AlarmAck IO.Mod.8.HiOffset IO.Mod.8.HiPoint IO.Mod.8.LoOffset IO.Mod.8.LoPoint IO.Mod.8.MinOnTime IO.Mod.8.PV IO.Mod.9.AlarmAck IO.Mod.9.HiOffset IO.Mod.9.HiPoint IO.Mod.9.LoOffset IO.Mod.9.LoPoint Part No HA028581 Issue 3 DEC 4185 4186 4187 4188 4189 4190 4191 426 442 438 435 432 429 422 426 442 438 435 432 429 422 426 442 439 435 432 429 423 426 442 439 435 432 429 423 426 442 439 436 432 429 423 426 442 439 436 432 429 423 426 442 439 436 433 429 423 426 442 439 436 433 429 423 426 442 439 436 433 Sep-05 HEX 1059 105A 105B 105C 105D 105E 105F 10a 114 112 110 10e 10c4 108 10a 114 112 110 10e 10c5 108 10a 114 112 110 10e 10c6 108 10a 114 112 110 10e 10c7 108 10a 114 112 110 10e 10c8 108 10a 114 112 110 10e 10c9 108 10a 114 112 110 10e 10ca 108 10a 114 112 110 10e 10cb 108 10ac 114c 112c 110c 10ec Mini8 Controller Engineering Handbook Parameter Description / Modbus address IO.Mod.9.MinOnTime IO.Mod.9.PV IO.Mod.10.AlarmAck IO.Mod.10.HiOffset IO.Mod.10.HiPoint IO.Mod.10.LoOffset IO.Mod.10.LoPoint IO.Mod.10.MinOnTime IO.Mod.10.PV IO.Mod.11.AlarmAck IO.Mod.11.HiOffset IO.Mod.11.HiPoint IO.Mod.11.LoOffset IO.Mod.11.LoPoint IO.Mod.11.MinOnTime IO.Mod.11.PV IO.Mod.12.AlarmAck IO.Mod.12.HiOffset IO.Mod.12.HiPoint IO.Mod.12.LoOffset IO.Mod.12.LoPoint IO.Mod.12.MinOnTime IO.Mod.12.PV IO.Mod.13.AlarmAck IO.Mod.13.HiOffset IO.Mod.13.HiPoint IO.Mod.13.LoOffset IO.Mod.13.LoPoint IO.Mod.13.MinOnTime IO.Mod.13.PV IO.Mod.14.AlarmAck IO.Mod.14.HiOffset IO.Mod.14.HiPoint IO.Mod.14.LoOffset IO.Mod.14.LoPoint IO.Mod.14.MinOnTime IO.Mod.14.PV IO.Mod.15.AlarmAck IO.Mod.15.HiOffset IO.Mod.15.HiPoint IO.Mod.15.LoOffset IO.Mod.15.LoPoint IO.Mod.15.MinOnTime IO.Mod.15.PV IO.Mod.16.AlarmAck IO.Mod.16.HiOffset IO.Mod.16.HiPoint IO.Mod.16.LoOffset IO.Mod.16.LoPoint IO.Mod.16.MinOnTime IO.Mod.16.PV IO.Mod.17.AlarmAck IO.Mod.17.HiOffset IO.Mod.17.HiPoint IO.Mod.17.LoOffset IO.Mod.17.LoPoint IO.Mod.17.MinOnTime IO.Mod.17.PV IO.Mod.18.AlarmAck IO.Mod.18.HiOffset IO.Mod.18.HiPoint IO.Mod.18.LoOffset IO.Mod.18.LoPoint IO.Mod.18.MinOnTime IO.Mod.18.PV IO.Mod.19.AlarmAck IO.Mod.19.HiOffset IO.Mod.19.HiPoint IO.Mod.19.LoOffset Part No HA028581 Issue 3 Sep-05 DEC 430 423 426 442 439 436 433 430 423 427 443 439 436 433 430 423 427 443 439 436 433 430 423 427 443 440 436 433 430 424 427 443 440 436 433 430 424 427 443 440 437 433 430 424 427 443 440 437 433 430 424 427 443 440 437 434 430 424 427 443 440 437 434 430 424 427 443 440 437 HEX 10cc 108c 10a 114 112 110 10e 10cd 108 10a 114 112 110 10e 10ce 108 10af 114f 112f 110f 10ef 10cf 108f 10b 115 113 111 10f0 10d 109 10b 115 113 111 10f1 10d 109 10b 115 113 111 10f2 10d 109 10b 115 113 111 10f3 10d 109 10b 115 113 111 10f4 10d 109 10b 115 113 111 10f5 10d 109 10b 115 113 111 Parameter Description / Modbus address IO.Mod.19.LoPoint IO.Mod.19.MinOnTime IO.Mod.19.PV IO.Mod.20.AlarmAck IO.Mod.20.HiOffset IO.Mod.20.HiPoint IO.Mod.20.LoOffset IO.Mod.20.LoPoint IO.Mod.20.MinOnTime IO.Mod.20.PV IO.Mod.21.AlarmAck IO.Mod.21.HiOffset IO.Mod.21.HiPoint IO.Mod.21.LoOffset IO.Mod.21.LoPoint IO.Mod.21.MinOnTime IO.Mod.21.PV IO.Mod.22.AlarmAck IO.Mod.22.HiOffset IO.Mod.22.HiPoint IO.Mod.22.LoOffset IO.Mod.22.LoPoint IO.Mod.22.MinOnTime IO.Mod.22.PV IO.Mod.23.AlarmAck IO.Mod.23.HiOffset IO.Mod.23.HiPoint IO.Mod.23.LoOffset IO.Mod.23.LoPoint IO.Mod.23.MinOnTime IO.Mod.23.PV IO.Mod.24.AlarmAck IO.Mod.24.HiOffset IO.Mod.24.HiPoint IO.Mod.24.LoOffset IO.Mod.24.LoPoint IO.Mod.24.MinOnTime IO.Mod.24.PV IO.Mod.25.AlarmAck IO.Mod.25.HiOffset IO.Mod.25.HiPoint IO.Mod.25.LoOffset IO.Mod.25.LoPoint IO.Mod.25.MinOnTime IO.Mod.25.PV IO.Mod.26.AlarmAck IO.Mod.26.HiOffset IO.Mod.26.HiPoint IO.Mod.26.LoOffset IO.Mod.26.LoPoint IO.Mod.26.MinOnTime IO.Mod.26.PV IO.Mod.27.AlarmAck IO.Mod.27.HiOffset IO.Mod.27.HiPoint IO.Mod.27.LoOffset IO.Mod.27.LoPoint IO.Mod.27.MinOnTime IO.Mod.27.PV IO.Mod.28.AlarmAck IO.Mod.28.HiOffset IO.Mod.28.HiPoint IO.Mod.28.LoOffset IO.Mod.28.LoPoint IO.Mod.28.MinOnTime IO.Mod.28.PV IO.Mod.29.AlarmAck IO.Mod.29.HiOffset IO.Mod.29.HiPoint DEC 434 431 424 427 443 440 437 434 431 424 428 444 444 437 434 431 424 428 444 440 437 434 431 424 428 444 441 437 434 431 425 428 444 441 437 434 431 425 428 444 441 438 434 431 425 428 444 441 438 434 431 425 428 444 441 438 435 431 425 428 444 441 438 435 431 425 428 444 441 217 HEX 10f6 10d 109 10b 115 113 111 10f7 10d 109 10b 115 113 111 10f8 10d 109 10b 115 113 111 10f9 10d 109 10b 115 113 111 10fa 10d 109 10b 115 113 111 10fb 10d 109 10bc 115c 113c 111c 10fc 10dc 109c 10b 115 113 111 10fd 10d 109 10b 115 113 111 10fe 10d 109 10bf 115f 113f 111f 10ff 10df 109f 10c0 116 114 Engineering Handbook Parameter Description / Modbus address IO.Mod.29.LoOffset IO.Mod.29.LoPoint IO.Mod.29.MinOnTime IO.Mod.29.PV IO.Mod.30.AlarmAck IO.Mod.30.HiOffset IO.Mod.30.HiPoint IO.Mod.30.LoOffset IO.Mod.30.LoPoint IO.Mod.30.MinOnTime IO.Mod.30.PV IO.Mod.31.AlarmAck IO.Mod.31.HiOffset IO.Mod.31.HiPoint IO.Mod.31.LoOffset IO.Mod.31.LoPoint IO.Mod.31.MinOnTime IO.Mod.31.PV IO.Mod.32.AlarmAck IO.Mod.32.HiOffset IO.Mod.32.HiPoint IO.Mod.32.LoOffset IO.Mod.32.LoPoint IO.Mod.32.MinOnTime IO.Mod.32.PV IO.ModIDs.Module1 IO.ModIDs.Module2 IO.ModIDs.Module3 IO.ModIDs.Module4 IPMonitor.1.Max IPMonitor.1.Min IPMonitor.1.Reset IPMonitor.1.Threshold IPMonitor.1.TimeAbove IPMonitor.2.Max IPMonitor.2.Min IPMonitor.2.Reset IPMonitor.2.Threshold IPMonitor.2.TimeAbove Lgc2.1.In1 Lgc2.1.In2 Lgc2.1.Out Lgc2.2.In1 Lgc2.2.In2 Lgc2.2.Out Lgc2.3.In1 Lgc2.3.In2 Lgc2.3.Out Lgc2.4.In1 Lgc2.4.In2 Lgc2.4.Out Lgc2.5.In1 Lgc2.5.In2 Lgc2.5.Out Lgc2.6.In1 Lgc2.6.In2 Lgc2.6.Out Lgc2.7.In1 Lgc2.7.In2 Lgc2.7.Out Lgc2.8.In1 Lgc2.8.In2 Lgc2.8.Out Lgc2.9.In1 Lgc2.9.In2 218 Mini8 Controller DEC 438 435 432 425 428 444 441 438 435 432 425 429 445 441 438 435 432 425 429 445 441 438 435 432 425 12707 12771 12835 12899 4915 4916 4919 4917 4918 4920 4921 4924 4922 4923 4822 4823 4824 4825 4826 4827 4828 4829 4830 4831 4832 4833 4834 4835 4836 4837 4838 4839 4840 4841 4842 4843 4844 4845 4846 4847 HEX 112 110 10e 10a 10c1 116 114 112 110 10e 10a 10c2 116 114 112 110 10e 10a 10c3 116 114 112 110 10e 10a 31A3 31E3 3223 3263 1333 1334 1337 1335 1336 1338 1339 133C 133A 133B 12D6 12D7 12D8 12D9 12DA 12DB 12DC 12DD 12DE 12DF 12E0 12E1 12E2 12E3 12E4 12E5 12E6 12E7 12E8 12E9 12EA 12EB 12EC 12ED 12EE 12EF Parameter Description / Modbus address Lgc2.9.Out Lgc2.10.In1 Lgc2.10.In2 Lgc2.10.Out Lgc2.11.In1 Lgc2.11.In2 Lgc2.11.Out Lgc2.12.In1 Lgc2.12.In2 Lgc2.12.Out Lgc2.13.In1 Lgc2.13.In2 Lgc2.13.Out Lgc2.14.In1 Lgc2.14.In2 Lgc2.14.Out Lgc2.15.In1 Lgc2.15.In2 Lgc2.15.Out Lgc2.16.In1 Lgc2.16.In2 Lgc2.16.Out Lgc2.17.In1 Lgc2.17.In2 Lgc2.17.Out Lgc2.18.In1 Lgc2.18.In2 Lgc2.18.Out Lgc2.19.In1 Lgc2.19.In2 Lgc2.19.Out Lgc2.20.In1 Lgc2.20.In2 Lgc2.20.Out Lgc2.21.In1 Lgc2.21.In2 Lgc2.21.Out Lgc2.22.In1 Lgc2.22.In2 Lgc2.22.Out Lgc2.23.In1 Lgc2.23.In2 Lgc2.23.Out Lgc2.24.In1 Lgc2.24.In2 Lgc2.24.Out Lgc8.1.In1 Lgc8.1.In2 Lgc8.1.In3 Lgc8.1.In4 Lgc8.1.In5 Lgc8.1.In6 Lgc8.1.In7 Lgc8.1.In8 Lgc8.1.Out Lgc8.2.In1 Lgc8.2.In2 Lgc8.2.In3 Lgc8.2.In4 Lgc8.2.In5 Lgc8.2.In6 Lgc8.2.In7 Lgc8.2.In8 Part No HA028581 Issue 3 DEC 4848 4849 4850 4851 4852 4853 4854 4855 4856 4857 4858 4859 4860 4861 4862 4863 4864 4865 4866 4867 4868 4869 4870 4871 4872 4873 4874 4875 4876 4877 4878 4879 4880 4881 4882 4883 4884 4885 4886 4887 4888 4889 4890 4891 4892 4893 4894 4895 4896 4897 4898 4899 4900 4901 4902 4903 4904 4905 4906 4907 4908 4909 4910 Sep-05 HEX 12F0 12F1 12F2 12F3 12F4 12F5 12F6 12F7 12F8 12F9 12FA 12FB 12FC 12FD 12FE 12FF 1300 1301 1302 1303 1304 1305 1306 1307 1308 1309 130A 130B 130C 130D 130E 130F 1310 1311 1312 1313 1314 1315 1316 1317 1318 1319 131A 131B 131C 131D 131E 131F 1320 1321 1322 1323 1324 1325 1326 1327 1328 1329 132A 132B 132C 132D 132E Mini8 Controller Engineering Handbook Parameter Description / Modbus address Lgc8.2.Out Lin16.In Lin16.In1 Lin16.In2 Lin16.In3 Lin16.In4 Lin16.In5 Lin16.In6 Lin16.In7 Lin16.In8 Lin16.In9 Lin16.In10 Lin16.In11 Lin16.In12 Lin16.In13 Lin16.In14 Lin16.InHighLimit Lin16.InLowLimit Lin16.Out Lin16.Out1 Lin16.Out2 Lin16.Out3 Lin16.Out4 Lin16.Out5 Lin16.Out6 Lin16.Out7 Lin16.Out8 Lin16.Out9 Lin16.Out10 Lin16.Out11 Lin16.Out12 Lin16.Out13 Lin16.Out14 Lin16.OutHighLimit Lin16.OutLowLimit Loop.1.Diag.DerivativeOutContrib Loop.1.Diag.Error Loop.1.Diag.IntegralOutContrib Loop.1.Diag.LoopBreakAlarm Loop.1.Diag.LoopMode Loop.1.Diag.PropOutContrib Loop.1.Diag.SBrk Loop.1.Diag.SchedCBH Loop.1.Diag.SchedCBL Loop.1.Diag.SchedLPBrk Loop.1.Diag.SchedMR Loop.1.Diag.SchedOPHi Loop.1.Diag.SchedOPLo Loop.1.Diag.SchedPB Loop.1.Diag.SchedR2G Loop.1.Diag.SchedTd Loop.1.Diag.SchedTi Loop.1.Diag.TargetOutVal Loop.1.Main.ActiveOut Loop.1.Main.AutoMan Loop.1.Main.Inhibit Loop.1.Main.PV Loop.1.Main.TargetSP Loop.1.Main.WorkingSP Loop.1.OP.Ch1OnOffHysteresis Loop.1.OP.Ch1Out Loop.1.OP.Ch2Deadband Loop.1.OP.Ch2OnOffHysteresis Part No HA028581 Issue 3 Sep-05 DEC 4911 4960 4929 4930 4931 4932 4933 4934 4935 4936 4937 4938 4939 4940 4941 4942 4943 4928 4961 4945 4946 4947 4948 4949 4950 4951 4952 4953 4954 4955 4956 4957 4958 4959 4944 119 113 118 116 114 117 120 32 33 35 34 37 38 29 36 31 30 115 4 10 20 1 2 5 84 82 16 85 HEX 132F 1360 1341 1342 1343 1344 1345 1346 1347 1348 1349 134A 134B 134C 134D 134E 134F 1340 1361 1351 1352 1353 1354 1355 1356 1357 1358 1359 135A 135B 135C 135D 135E 135F 1350 0077 0071 0076 0074 0072 0075 0078 0020 0021 0023 0022 0025 0026 001D 0024 001F 001E 0073 0004 000A 0014 0001 0002 0005 0054 0052 0010 0055 Parameter Description / Modbus address Loop.1.OP.Ch2Out Loop.1.OP.CoolType Loop.1.OP.EnablePowerFeedforward Loop.1.OP.FeedForwardGain Loop.1.OP.FeedForwardOffset Loop.1.OP.FeedForwardTrimLimit Loop.1.OP.FeedForwardType Loop.1.OP.FeedForwardVal Loop.1.OP.FF_Rem Loop.1.OP.ManualMode Loop.1.OP.ManualOutVal Loop.1.OP.MeasuredPower Loop.1.OP.OutputHighLimit Loop.1.OP.OutputLowLimit Loop.1.OP.Rate Loop.1.OP.RateDisable Loop.1.OP.RemOPH Loop.1.OP.RemOPL Loop.1.OP.SafeOutVal Loop.1.OP.SensorBreakMode Loop.1.OP.TrackEnable Loop.1.OP.TrackOutVal Loop.1.PID.ActiveSet Loop.1.PID.Boundary1-2 Loop.1.PID.Boundary2-3 Loop.1.PID.CutbackHigh Loop.1.PID.CutbackHigh2 Loop.1.PID.CutbackHigh3 Loop.1.PID.CutbackLow Loop.1.PID.CutbackLow2 Loop.1.PID.CutbackLow3 Loop.1.PID.DerivativeTime Loop.1.PID.DerivativeTime2 Loop.1.PID.DerivativeTime3 Loop.1.PID.IntegralTime Loop.1.PID.IntegralTime2 Loop.1.PID.IntegralTime3 Loop.1.PID.LoopBreakTime Loop.1.PID.LoopBreakTime2 Loop.1.PID.LoopBreakTime3 Loop.1.PID.ManualReset Loop.1.PID.ManualReset2 Loop.1.PID.ManualReset3 Loop.1.PID.NumSets Loop.1.PID.OutputHi Loop.1.PID.OutputHi2 Loop.1.PID.OutputHi3 Loop.1.PID.OutputLo Loop.1.PID.OutputLo2 Loop.1.PID.OutputLo3 Loop.1.PID.ProportionalBand Loop.1.PID.ProportionalBand2 Loop.1.PID.ProportionalBand3 Loop.1.PID.RelCh2Gain Loop.1.PID.RelCh2Gain2 Loop.1.PID.RelCh2Gain3 Loop.1.PID.SchedulerRemoteInput Loop.1.PID.SchedulerType Loop.1.Setup.CH1ControlType Loop.1.Setup.CH2ControlType Loop.1.Setup.ControlAction Loop.1.Setup.DerivativeType Loop.1.Setup.LoopType DEC 83 93 91 95 96 97 94 98 103 90 3 92 80 81 86 87 102 101 89 88 100 99 28 26 27 18 46 56 17 47 57 9 45 55 8 44 54 40 49 59 39 48 58 64 41 51 61 42 52 62 6 43 53 19 50 60 65 63 22 23 7 25 21 219 HEX 0053 005D 005B 005F 0060 0061 005E 0062 0067 005A 0003 005C 0050 0051 0056 0057 0066 0065 0059 0058 0064 0063 001C 001A 001B 0012 002E 0038 0011 002F 0039 0009 002D 0037 0008 002C 0036 0028 0031 003B 0027 0030 003A 0040 0029 0033 003D 002A 0034 003E 0006 002B 0035 0013 0032 003C 0041 003F 0016 0017 0007 0019 0015 Engineering Handbook Parameter Description / Modbus address Loop.1.Setup.PBUnits Loop.1.SP.AltSP Loop.1.SP.AltSPSelect Loop.1.SP.ManualTrack Loop.1.SP.RangeHigh Loop.1.SP.RangeLow Loop.1.SP.Rate Loop.1.SP.RateDisable Loop.1.SP.RateDone Loop.1.SP.SP1 Loop.1.SP.SP2 Loop.1.SP.SPHighLimit Loop.1.SP.SPLowLimit Loop.1.SP.SPSelect Loop.1.SP.SPTrack Loop.1.SP.SPTrim Loop.1.SP.SPTrimHighLimit Loop.1.SP.SPTrimLowLimit Loop.1.SP.TrackPV Loop.1.SP.TrackSP Loop.1.Tune.AutotuneEnable Loop.1.Tune.OutputHighLimit Loop.1.Tune.OutputLowLimit Loop.1.Tune.Stage Loop.1.Tune.StageTime Loop.1.Tune.State Loop.1.Tune.StepSize Loop.1.Tune.Type Loop.2.Diag.DerivativeOutContrib Loop.2.Diag.Error Loop.2.Diag.IntegralOutContrib Loop.2.Diag.LoopBreakAlarm Loop.2.Diag.LoopMode Loop.2.Diag.PropOutContrib Loop.2.Diag.SBrk Loop.2.Diag.SchedCBH Loop.2.Diag.SchedCBL Loop.2.Diag.SchedLPBrk Loop.2.Diag.SchedMR Loop.2.Diag.SchedOPHi Loop.2.Diag.SchedOPLo Loop.2.Diag.SchedPB Loop.2.Diag.SchedR2G Loop.2.Diag.SchedTd Loop.2.Diag.SchedTi Loop.2.Diag.TargetOutVal Loop.2.Main.ActiveOut Loop.2.Main.AutoMan Loop.2.Main.Inhibit Loop.2.Main.PV Loop.2.Main.TargetSP Loop.2.Main.WorkingSP Loop.2.OP.Ch1OnOffHysteresis Loop.2.OP.Ch1Out Loop.2.OP.Ch2Deadband Loop.2.OP.Ch2OnOffHysteresis Loop.2.OP.Ch2Out Loop.2.OP.CoolType Loop.2.OP.EnablePowerFeedforward Loop.2.OP.FeedForwardGain Loop.2.OP.FeedForwardOffset Loop.2.OP.FeedForwardTrimLimit Loop.2.OP.FeedForwardType 220 Mini8 Controller DEC 24 68 69 75 12 11 70 71 79 13 14 66 67 15 76 72 73 74 77 78 108 105 106 111 112 110 109 104 375 369 374 372 370 373 376 288 289 291 290 293 294 285 292 287 286 371 260 266 276 257 258 261 340 338 272 341 339 349 347 351 352 353 350 HEX 0018 0044 0045 004B 000C 000B 0046 0047 004F 000D 000E 0042 0043 000F 004C 0048 0049 004A 004D 004E 006C 0069 006A 006F 0070 006E 006D 0068 0177 0171 0176 0174 0172 0175 0178 0120 0121 0123 0122 0125 0126 011D 0124 011F 011E 0173 0104 010A 0114 0101 0102 0105 0154 0152 0110 0155 0153 015D 015B 015F 0160 0161 015E Parameter Description / Modbus address Loop.2.OP.FeedForwardVal Loop.2.OP.FF_Rem Loop.2.OP.ManualMode Loop.2.OP.ManualOutVal Loop.2.OP.MeasuredPower Loop.2.OP.OutputHighLimit Loop.2.OP.OutputLowLimit Loop.2.OP.Rate Loop.2.OP.RateDisable Loop.2.OP.RemOPH Loop.2.OP.RemOPL Loop.2.OP.SafeOutVal Loop.2.OP.SensorBreakMode Loop.2.OP.TrackEnable Loop.2.OP.TrackOutVal Loop.2.PID.ActiveSet Loop.2.PID.Boundary1-2 Loop.2.PID.Boundary2-3 Loop.2.PID.CutbackHigh Loop.2.PID.CutbackHigh2 Loop.2.PID.CutbackHigh3 Loop.2.PID.CutbackLow Loop.2.PID.CutbackLow2 Loop.2.PID.CutbackLow3 Loop.2.PID.DerivativeTime Loop.2.PID.DerivativeTime2 Loop.2.PID.DerivativeTime3 Loop.2.PID.IntegralTime Loop.2.PID.IntegralTime2 Loop.2.PID.IntegralTime3 Loop.2.PID.LoopBreakTime Loop.2.PID.LoopBreakTime2 Loop.2.PID.LoopBreakTime3 Loop.2.PID.ManualReset Loop.2.PID.ManualReset2 Loop.2.PID.ManualReset3 Loop.2.PID.NumSets Loop.2.PID.OutputHi Loop.2.PID.OutputHi2 Loop.2.PID.OutputHi3 Loop.2.PID.OutputLo Loop.2.PID.OutputLo2 Loop.2.PID.OutputLo3 Loop.2.PID.ProportionalBand Loop.2.PID.ProportionalBand2 Loop.2.PID.ProportionalBand3 Loop.2.PID.RelCh2Gain Loop.2.PID.RelCh2Gain2 Loop.2.PID.RelCh2Gain3 Loop.2.PID.SchedulerRemoteInput Loop.2.PID.SchedulerType Loop.2.Setup.CH1ControlType Loop.2.Setup.CH2ControlType Loop.2.Setup.ControlAction Loop.2.Setup.DerivativeType Loop.2.Setup.LoopType Loop.2.Setup.PBUnits Loop.2.SP.AltSP Loop.2.SP.AltSPSelect Loop.2.SP.ManualTrack Loop.2.SP.RangeHigh Loop.2.SP.RangeLow Loop.2.SP.Rate Part No HA028581 Issue 3 DEC 354 359 346 259 348 336 337 342 343 358 357 345 344 356 355 284 282 283 274 302 312 273 303 313 265 301 311 264 300 310 296 305 315 295 304 314 320 297 307 317 298 308 318 262 299 309 275 306 316 321 319 278 279 263 281 277 280 324 325 331 268 267 326 Sep-05 HEX 0162 0167 015A 0103 015C 0150 0151 0156 0157 0166 0165 0159 0158 0164 0163 011C 011A 011B 0112 012E 0138 0111 012F 0139 0109 012D 0137 0108 012C 0136 0128 0131 013B 0127 0130 013A 0140 0129 0133 013D 012A 0134 013E 0106 012B 0135 0113 0132 013C 0141 013F 0116 0117 0107 0119 0115 0118 0144 0145 014B 010C 010B 0146 Mini8 Controller Engineering Handbook Parameter Description / Modbus address Loop.2.SP.RateDisable Loop.2.SP.RateDone Loop.2.SP.SP1 Loop.2.SP.SP2 Loop.2.SP.SPHighLimit Loop.2.SP.SPLowLimit Loop.2.SP.SPSelect Loop.2.SP.SPTrack Loop.2.SP.SPTrim Loop.2.SP.SPTrimHighLimit Loop.2.SP.SPTrimLowLimit Loop.2.SP.TrackPV Loop.2.SP.TrackSP Loop.2.Tune.AutotuneEnable Loop.2.Tune.OutputHighLimit Loop.2.Tune.OutputLowLimit Loop.2.Tune.Stage Loop.2.Tune.StageTime Loop.2.Tune.State Loop.2.Tune.StepSize Loop.2.Tune.Type Loop.3.Diag.DerivativeOutContrib Loop.3.Diag.Error Loop.3.Diag.IntegralOutContrib Loop.3.Diag.LoopBreakAlarm Loop.3.Diag.LoopMode Loop.3.Diag.PropOutContrib Loop.3.Diag.SBrk Loop.3.Diag.SchedCBH Loop.3.Diag.SchedCBL Loop.3.Diag.SchedLPBrk Loop.3.Diag.SchedMR Loop.3.Diag.SchedOPHi Loop.3.Diag.SchedOPLo Loop.3.Diag.SchedPB Loop.3.Diag.SchedR2G Loop.3.Diag.SchedTd Loop.3.Diag.SchedTi Loop.3.Diag.TargetOutVal Loop.3.Main.ActiveOut Loop.3.Main.AutoMan Loop.3.Main.Inhibit Loop.3.Main.PV Loop.3.Main.TargetSP Loop.3.Main.WorkingSP Loop.3.OP.Ch1OnOffHysteresis Loop.3.OP.Ch1Out Loop.3.OP.Ch2Deadband Loop.3.OP.Ch2OnOffHysteresis Loop.3.OP.Ch2Out Loop.3.OP.CoolType Loop.3.OP.EnablePowerFeedforward Loop.3.OP.FeedForwardGain Loop.3.OP.FeedForwardOffset Loop.3.OP.FeedForwardTrimLimit Loop.3.OP.FeedForwardType Loop.3.OP.FeedForwardVal Loop.3.OP.FF_Rem Loop.3.OP.ManualMode Loop.3.OP.ManualOutVal Loop.3.OP.MeasuredPower Loop.3.OP.OutputHighLimit Loop.3.OP.OutputLowLimit Part No HA028581 Issue 3 Sep-05 DEC 327 335 269 270 322 323 271 332 328 329 330 333 334 364 361 362 367 368 366 365 360 631 625 630 628 626 629 632 544 545 547 546 549 550 541 548 543 542 627 516 522 532 513 514 517 596 594 528 597 595 605 603 607 608 609 606 610 615 602 515 604 592 593 HEX 0147 014F 010D 010E 0142 0143 010F 014C 0148 0149 014A 014D 014E 016C 0169 016A 016F 0170 016E 016D 0168 0277 0271 0276 0274 0272 0275 0278 0220 0221 0223 0222 0225 0226 021D 0224 021F 021E 0273 0204 020A 0214 0201 0202 0205 0254 0252 0210 0255 0253 025D 025B 025F 0260 0261 025E 0262 0267 025A 0203 025C 0250 0251 Parameter Description / Modbus address Loop.3.OP.Rate Loop.3.OP.RateDisable Loop.3.OP.RemOPH Loop.3.OP.RemOPL Loop.3.OP.SafeOutVal Loop.3.OP.SensorBreakMode Loop.3.OP.TrackEnable Loop.3.OP.TrackOutVal Loop.3.PID.ActiveSet Loop.3.PID.Boundary1-2 Loop.3.PID.Boundary2-3 Loop.3.PID.CutbackHigh Loop.3.PID.CutbackHigh2 Loop.3.PID.CutbackHigh3 Loop.3.PID.CutbackLow Loop.3.PID.CutbackLow2 Loop.3.PID.CutbackLow3 Loop.3.PID.DerivativeTime Loop.3.PID.DerivativeTime2 Loop.3.PID.DerivativeTime3 Loop.3.PID.IntegralTime Loop.3.PID.IntegralTime2 Loop.3.PID.IntegralTime3 Loop.3.PID.LoopBreakTime Loop.3.PID.LoopBreakTime2 Loop.3.PID.LoopBreakTime3 Loop.3.PID.ManualReset Loop.3.PID.ManualReset2 Loop.3.PID.ManualReset3 Loop.3.PID.NumSets Loop.3.PID.OutputHi Loop.3.PID.OutputHi2 Loop.3.PID.OutputHi3 Loop.3.PID.OutputLo Loop.3.PID.OutputLo2 Loop.3.PID.OutputLo3 Loop.3.PID.ProportionalBand Loop.3.PID.ProportionalBand2 Loop.3.PID.ProportionalBand3 Loop.3.PID.RelCh2Gain Loop.3.PID.RelCh2Gain2 Loop.3.PID.RelCh2Gain3 Loop.3.PID.SchedulerRemoteInput Loop.3.PID.SchedulerType Loop.3.Setup.CH1ControlType Loop.3.Setup.CH2ControlType Loop.3.Setup.ControlAction Loop.3.Setup.DerivativeType Loop.3.Setup.LoopType Loop.3.Setup.PBUnits Loop.3.SP.AltSP Loop.3.SP.AltSPSelect Loop.3.SP.ManualTrack Loop.3.SP.RangeHigh Loop.3.SP.RangeLow Loop.3.SP.Rate Loop.3.SP.RateDisable Loop.3.SP.RateDone Loop.3.SP.SP1 Loop.3.SP.SP2 Loop.3.SP.SPHighLimit Loop.3.SP.SPLowLimit Loop.3.SP.SPSelect DEC 598 599 614 613 601 600 612 611 540 538 539 530 558 568 529 559 569 521 557 567 520 556 566 552 561 571 551 560 570 576 553 563 573 554 564 574 518 555 565 531 562 572 577 575 534 535 519 537 533 536 580 581 587 524 523 582 583 591 525 526 578 579 527 221 HEX 0256 0257 0266 0265 0259 0258 0264 0263 021C 021A 021B 0212 022E 0238 0211 022F 0239 0209 022D 0237 0208 022C 0236 0228 0231 023B 0227 0230 023A 0240 0229 0233 023D 022A 0234 023E 0206 022B 0235 0213 0232 023C 0241 023F 0216 0217 0207 0219 0215 0218 0244 0245 024B 020C 020B 0246 0247 024F 020D 020E 0242 0243 020F Engineering Handbook Parameter Description / Modbus address Loop.3.SP.SPTrack Loop.3.SP.SPTrim Loop.3.SP.SPTrimHighLimit Loop.3.SP.SPTrimLowLimit Loop.3.SP.TrackPV Loop.3.SP.TrackSP Loop.3.Tune.AutotuneEnable Loop.3.Tune.OutputHighLimit Loop.3.Tune.OutputLowLimit Loop.3.Tune.Stage Loop.3.Tune.StageTime Loop.3.Tune.State Loop.3.Tune.StepSize Loop.3.Tune.Type Loop.4.Diag.DerivativeOutContrib Loop.4.Diag.Error Loop.4.Diag.IntegralOutContrib Loop.4.Diag.LoopBreakAlarm Loop.4.Diag.LoopMode Loop.4.Diag.PropOutContrib Loop.4.Diag.SBrk Loop.4.Diag.SchedCBH Loop.4.Diag.SchedCBL Loop.4.Diag.SchedLPBrk Loop.4.Diag.SchedMR Loop.4.Diag.SchedOPHi Loop.4.Diag.SchedOPLo Loop.4.Diag.SchedPB Loop.4.Diag.SchedR2G Loop.4.Diag.SchedTd Loop.4.Diag.SchedTi Loop.4.Diag.TargetOutVal Loop.4.Main.ActiveOut Loop.4.Main.AutoMan Loop.4.Main.Inhibit Loop.4.Main.PV Loop.4.Main.TargetSP Loop.4.Main.WorkingSP Loop.4.OP.Ch1OnOffHysteresis Loop.4.OP.Ch1Out Loop.4.OP.Ch2Deadband Loop.4.OP.Ch2OnOffHysteresis Loop.4.OP.Ch2Out Loop.4.OP.CoolType Loop.4.OP.EnablePowerFeedforward Loop.4.OP.FeedForwardGain Loop.4.OP.FeedForwardOffset Loop.4.OP.FeedForwardTrimLimit Loop.4.OP.FeedForwardType Loop.4.OP.FeedForwardVal Loop.4.OP.FF_Rem Loop.4.OP.ManualMode Loop.4.OP.ManualOutVal Loop.4.OP.MeasuredPower Loop.4.OP.OutputHighLimit Loop.4.OP.OutputLowLimit Loop.4.OP.Rate Loop.4.OP.RateDisable Loop.4.OP.RemOPH Loop.4.OP.RemOPL Loop.4.OP.SafeOutVal Loop.4.OP.SensorBreakMode Loop.4.OP.TrackEnable 222 Mini8 Controller DEC 588 584 585 586 589 590 620 617 618 623 624 622 621 616 887 881 886 884 882 885 888 800 801 803 802 805 806 797 804 799 798 883 772 778 788 769 770 773 852 850 784 853 851 861 859 863 864 865 862 866 871 858 771 860 848 849 854 855 870 869 857 856 868 HEX 024C 0248 0249 024A 024D 024E 026C 0269 026A 026F 0270 026E 026D 0268 0377 0371 0376 0374 0372 0375 0378 0320 0321 0323 0322 0325 0326 031D 0324 031F 031E 0373 0304 030A 0314 0301 0302 0305 0354 0352 0310 0355 0353 035D 035B 035F 0360 0361 035E 0362 0367 035A 0303 035C 0350 0351 0356 0357 0366 0365 0359 0358 0364 Parameter Description / Modbus address Loop.4.OP.TrackOutVal Loop.4.PID.ActiveSet Loop.4.PID.Boundary1-2 Loop.4.PID.Boundary2-3 Loop.4.PID.CutbackHigh Loop.4.PID.CutbackHigh2 Loop.4.PID.CutbackHigh3 Loop.4.PID.CutbackLow Loop.4.PID.CutbackLow2 Loop.4.PID.CutbackLow3 Loop.4.PID.DerivativeTime Loop.4.PID.DerivativeTime2 Loop.4.PID.DerivativeTime3 Loop.4.PID.IntegralTime Loop.4.PID.IntegralTime2 Loop.4.PID.IntegralTime3 Loop.4.PID.LoopBreakTime Loop.4.PID.LoopBreakTime2 Loop.4.PID.LoopBreakTime3 Loop.4.PID.ManualReset Loop.4.PID.ManualReset2 Loop.4.PID.ManualReset3 Loop.4.PID.NumSets Loop.4.PID.OutputHi Loop.4.PID.OutputHi2 Loop.4.PID.OutputHi3 Loop.4.PID.OutputLo Loop.4.PID.OutputLo2 Loop.4.PID.OutputLo3 Loop.4.PID.ProportionalBand Loop.4.PID.ProportionalBand2 Loop.4.PID.ProportionalBand3 Loop.4.PID.RelCh2Gain Loop.4.PID.RelCh2Gain2 Loop.4.PID.RelCh2Gain3 Loop.4.PID.SchedulerRemoteInput Loop.4.PID.SchedulerType Loop.4.Setup.CH1ControlType Loop.4.Setup.CH2ControlType Loop.4.Setup.ControlAction Loop.4.Setup.DerivativeType Loop.4.Setup.LoopType Loop.4.Setup.PBUnits Loop.4.SP.AltSP Loop.4.SP.AltSPSelect Loop.4.SP.ManualTrack Loop.4.SP.RangeHigh Loop.4.SP.RangeLow Loop.4.SP.Rate Loop.4.SP.RateDisable Loop.4.SP.RateDone Loop.4.SP.SP1 Loop.4.SP.SP2 Loop.4.SP.SPHighLimit Loop.4.SP.SPLowLimit Loop.4.SP.SPSelect Loop.4.SP.SPTrack Loop.4.SP.SPTrim Loop.4.SP.SPTrimHighLimit Loop.4.SP.SPTrimLowLimit Loop.4.SP.TrackPV Loop.4.SP.TrackSP Loop.4.Tune.AutotuneEnable Part No HA028581 Issue 3 DEC 867 796 794 795 786 814 824 785 815 825 777 813 823 776 812 822 808 817 827 807 816 826 832 809 819 829 810 820 830 774 811 821 787 818 828 833 831 790 791 775 793 789 792 836 837 843 780 779 838 839 847 781 782 834 835 783 844 840 841 842 845 846 876 Sep-05 HEX 0363 031C 031A 031B 0312 032E 0338 0311 032F 0339 0309 032D 0337 0308 032C 0336 0328 0331 033B 0327 0330 033A 0340 0329 0333 033D 032A 0334 033E 0306 032B 0335 0313 0332 033C 0341 033F 0316 0317 0307 0319 0315 0318 0344 0345 034B 030C 030B 0346 0347 034F 030D 030E 0342 0343 030F 034C 0348 0349 034A 034D 034E 036C Mini8 Controller Engineering Handbook Parameter Description / Modbus address Loop.4.Tune.OutputHighLimit Loop.4.Tune.OutputLowLimit Loop.4.Tune.Stage Loop.4.Tune.StageTime Loop.4.Tune.State Loop.4.Tune.StepSize Loop.4.Tune.Type Loop.5.Diag.DerivativeOutContrib Loop.5.Diag.Error Loop.5.Diag.IntegralOutContrib Loop.5.Diag.LoopBreakAlarm Loop.5.Diag.LoopMode Loop.5.Diag.PropOutContrib Loop.5.Diag.SBrk Loop.5.Diag.SchedCBH Loop.5.Diag.SchedCBL Loop.5.Diag.SchedLPBrk Loop.5.Diag.SchedMR Loop.5.Diag.SchedOPHi Loop.5.Diag.SchedOPLo Loop.5.Diag.SchedPB Loop.5.Diag.SchedR2G Loop.5.Diag.SchedTd Loop.5.Diag.SchedTi Loop.5.Diag.TargetOutVal Loop.5.Main.ActiveOut Loop.5.Main.AutoMan Loop.5.Main.Inhibit Loop.5.Main.PV Loop.5.Main.TargetSP Loop.5.Main.WorkingSP Loop.5.OP.Ch1OnOffHysteresis Loop.5.OP.Ch1Out Loop.5.OP.Ch2Deadband Loop.5.OP.Ch2OnOffHysteresis Loop.5.OP.Ch2Out Loop.5.OP.CoolType Loop.5.OP.EnablePowerFeedforward Loop.5.OP.FeedForwardGain Loop.5.OP.FeedForwardOffset Loop.5.OP.FeedForwardTrimLimit Loop.5.OP.FeedForwardType Loop.5.OP.FeedForwardVal Loop.5.OP.FF_Rem Loop.5.OP.ManualMode Loop.5.OP.ManualOutVal Loop.5.OP.MeasuredPower Loop.5.OP.OutputHighLimit Loop.5.OP.OutputLowLimit Loop.5.OP.Rate Loop.5.OP.RateDisable Loop.5.OP.RemOPH Loop.5.OP.RemOPL Loop.5.OP.SafeOutVal Loop.5.OP.SensorBreakMode Loop.5.OP.TrackEnable Loop.5.OP.TrackOutVal Loop.5.PID.ActiveSet Loop.5.PID.Boundary1-2 Loop.5.PID.Boundary2-3 Loop.5.PID.CutbackHigh Loop.5.PID.CutbackHigh2 Loop.5.PID.CutbackHigh3 Part No HA028581 Issue 3 Sep-05 DEC 873 874 879 880 878 877 872 1143 1137 1142 1140 1138 1141 1144 1056 1057 1059 1058 1061 1062 1053 1060 1055 1054 1139 1028 1034 1044 1025 1026 1029 1108 1106 1040 1109 1107 1117 1115 1119 1120 1121 1118 1122 1127 1114 1027 1116 1104 1105 1110 1111 1126 1125 1113 1112 1124 1123 1052 1050 1051 1042 1070 1080 HEX 0369 036A 036F 0370 036E 036D 0368 0477 0471 0476 0474 0472 0475 0478 0420 0421 0423 0422 0425 0426 041D 0424 041F 041E 0473 0404 040A 0414 0401 0402 0405 0454 0452 0410 0455 0453 045D 045B 045F 0460 0461 045E 0462 0467 045A 0403 045C 0450 0451 0456 0457 0466 0465 0459 0458 0464 0463 041C 041A 041B 0412 042E 0438 Parameter Description / Modbus address Loop.5.PID.CutbackLow Loop.5.PID.CutbackLow2 Loop.5.PID.CutbackLow3 Loop.5.PID.DerivativeTime Loop.5.PID.DerivativeTime2 Loop.5.PID.DerivativeTime3 Loop.5.PID.IntegralTime Loop.5.PID.IntegralTime2 Loop.5.PID.IntegralTime3 Loop.5.PID.LoopBreakTime Loop.5.PID.LoopBreakTime2 Loop.5.PID.LoopBreakTime3 Loop.5.PID.ManualReset Loop.5.PID.ManualReset2 Loop.5.PID.ManualReset3 Loop.5.PID.NumSets Loop.5.PID.OutputHi Loop.5.PID.OutputHi2 Loop.5.PID.OutputHi3 Loop.5.PID.OutputLo Loop.5.PID.OutputLo2 Loop.5.PID.OutputLo3 Loop.5.PID.ProportionalBand Loop.5.PID.ProportionalBand2 Loop.5.PID.ProportionalBand3 Loop.5.PID.RelCh2Gain Loop.5.PID.RelCh2Gain2 Loop.5.PID.RelCh2Gain3 Loop.5.PID.SchedulerRemoteInput Loop.5.PID.SchedulerType Loop.5.Setup.CH1ControlType Loop.5.Setup.CH2ControlType Loop.5.Setup.ControlAction Loop.5.Setup.DerivativeType Loop.5.Setup.LoopType Loop.5.Setup.PBUnits Loop.5.SP.AltSP Loop.5.SP.AltSPSelect Loop.5.SP.ManualTrack Loop.5.SP.RangeHigh Loop.5.SP.RangeLow Loop.5.SP.Rate Loop.5.SP.RateDisable Loop.5.SP.RateDone Loop.5.SP.SP1 Loop.5.SP.SP2 Loop.5.SP.SPHighLimit Loop.5.SP.SPLowLimit Loop.5.SP.SPSelect Loop.5.SP.SPTrack Loop.5.SP.SPTrim Loop.5.SP.SPTrimHighLimit Loop.5.SP.SPTrimLowLimit Loop.5.SP.TrackPV Loop.5.SP.TrackSP Loop.5.Tune.AutotuneEnable Loop.5.Tune.OutputHighLimit Loop.5.Tune.OutputLowLimit Loop.5.Tune.Stage Loop.5.Tune.StageTime Loop.5.Tune.State Loop.5.Tune.StepSize Loop.5.Tune.Type DEC 1041 1071 1081 1033 1069 1079 1032 1068 1078 1064 1073 1083 1063 1072 1082 1088 1065 1075 1085 1066 1076 1086 1030 1067 1077 1043 1074 1084 1089 1087 1046 1047 1031 1049 1045 1048 1092 1093 1099 1036 1035 1094 1095 1103 1037 1038 1090 1091 1039 1100 1096 1097 1098 1101 1102 1132 1129 1130 1135 1136 1134 1133 1128 223 HEX 0411 042F 0439 0409 042D 0437 0408 042C 0436 0428 0431 043B 0427 0430 043A 0440 0429 0433 043D 042A 0434 043E 0406 042B 0435 0413 0432 043C 0441 043F 0416 0417 0407 0419 0415 0418 0444 0445 044B 040C 040B 0446 0447 044F 040D 040E 0442 0443 040F 044C 0448 0449 044A 044D 044E 046C 0469 046A 046F 0470 046E 046D 0468 Engineering Handbook Parameter Description / Modbus address Loop.6.Diag.DerivativeOutContrib Loop.6.Diag.Error Loop.6.Diag.IntegralOutContrib Loop.6.Diag.LoopBreakAlarm Loop.6.Diag.LoopMode Loop.6.Diag.PropOutContrib Loop.6.Diag.SBrk Loop.6.Diag.SchedCBH Loop.6.Diag.SchedCBL Loop.6.Diag.SchedLPBrk Loop.6.Diag.SchedMR Loop.6.Diag.SchedOPHi Loop.6.Diag.SchedOPLo Loop.6.Diag.SchedPB Loop.6.Diag.SchedR2G Loop.6.Diag.SchedTd Loop.6.Diag.SchedTi Loop.6.Diag.TargetOutVal Loop.6.Main.ActiveOut Loop.6.Main.AutoMan Loop.6.Main.Inhibit Loop.6.Main.PV Loop.6.Main.TargetSP Loop.6.Main.WorkingSP Loop.6.OP.Ch1OnOffHysteresis Loop.6.OP.Ch1Out Loop.6.OP.Ch2Deadband Loop.6.OP.Ch2OnOffHysteresis Loop.6.OP.Ch2Out Loop.6.OP.CoolType Loop.6.OP.EnablePowerFeedforward Loop.6.OP.FeedForwardGain Loop.6.OP.FeedForwardOffset Loop.6.OP.FeedForwardTrimLimit Loop.6.OP.FeedForwardType Loop.6.OP.FeedForwardVal Loop.6.OP.FF_Rem Loop.6.OP.ManualMode Loop.6.OP.ManualOutVal Loop.6.OP.MeasuredPower Loop.6.OP.OutputHighLimit Loop.6.OP.OutputLowLimit Loop.6.OP.Rate Loop.6.OP.RateDisable Loop.6.OP.RemOPH Loop.6.OP.RemOPL Loop.6.OP.SafeOutVal Loop.6.OP.SensorBreakMode Loop.6.OP.TrackEnable Loop.6.OP.TrackOutVal Loop.6.PID.ActiveSet Loop.6.PID.Boundary1-2 Loop.6.PID.Boundary2-3 Loop.6.PID.CutbackHigh Loop.6.PID.CutbackHigh2 Loop.6.PID.CutbackHigh3 Loop.6.PID.CutbackLow Loop.6.PID.CutbackLow2 Loop.6.PID.CutbackLow3 Loop.6.PID.DerivativeTime Loop.6.PID.DerivativeTime2 Loop.6.PID.DerivativeTime3 Loop.6.PID.IntegralTime 224 Mini8 Controller DEC 1399 1393 1398 1396 1394 1397 1400 1312 1313 1315 1314 1317 1318 1309 1316 1311 1310 1395 1284 1290 1300 1281 1282 1285 1364 1362 1296 1365 1363 1373 1371 1375 1376 1377 1374 1378 1383 1370 1283 1372 1360 1361 1366 1367 1382 1381 1369 1368 1380 1379 1308 1306 1307 1298 1326 1336 1297 1327 1337 1289 1325 1335 1288 HEX 0577 0571 0576 0574 0572 0575 0578 0520 0521 0523 0522 0525 0526 051D 0524 051F 051E 0573 0504 050A 0514 0501 0502 0505 0554 0552 0510 0555 0553 055D 055B 055F 0560 0561 055E 0562 0567 055A 0503 055C 0550 0551 0556 0557 0566 0565 0559 0558 0564 0563 051C 051A 051B 0512 052E 0538 0511 052F 0539 0509 052D 0537 0508 Parameter Description / Modbus address Loop.6.PID.IntegralTime2 Loop.6.PID.IntegralTime3 Loop.6.PID.LoopBreakTime Loop.6.PID.LoopBreakTime2 Loop.6.PID.LoopBreakTime3 Loop.6.PID.ManualReset Loop.6.PID.ManualReset2 Loop.6.PID.ManualReset3 Loop.6.PID.NumSets Loop.6.PID.OutputHi Loop.6.PID.OutputHi2 Loop.6.PID.OutputHi3 Loop.6.PID.OutputLo Loop.6.PID.OutputLo2 Loop.6.PID.OutputLo3 Loop.6.PID.ProportionalBand Loop.6.PID.ProportionalBand2 Loop.6.PID.ProportionalBand3 Loop.6.PID.RelCh2Gain Loop.6.PID.RelCh2Gain2 Loop.6.PID.RelCh2Gain3 Loop.6.PID.SchedulerRemoteInput Loop.6.PID.SchedulerType Loop.6.Setup.CH1ControlType Loop.6.Setup.CH2ControlType Loop.6.Setup.ControlAction Loop.6.Setup.DerivativeType Loop.6.Setup.LoopType Loop.6.Setup.PBUnits Loop.6.SP.AltSP Loop.6.SP.AltSPSelect Loop.6.SP.ManualTrack Loop.6.SP.RangeHigh Loop.6.SP.RangeLow Loop.6.SP.Rate Loop.6.SP.RateDisable Loop.6.SP.RateDone Loop.6.SP.SP1 Loop.6.SP.SP2 Loop.6.SP.SPHighLimit Loop.6.SP.SPLowLimit Loop.6.SP.SPSelect Loop.6.SP.SPTrack Loop.6.SP.SPTrim Loop.6.SP.SPTrimHighLimit Loop.6.SP.SPTrimLowLimit Loop.6.SP.TrackPV Loop.6.SP.TrackSP Loop.6.Tune.AutotuneEnable Loop.6.Tune.OutputHighLimit Loop.6.Tune.OutputLowLimit Loop.6.Tune.Stage Loop.6.Tune.StageTime Loop.6.Tune.State Loop.6.Tune.StepSize Loop.6.Tune.Type Loop.7.Diag.DerivativeOutContrib Loop.7.Diag.Error Loop.7.Diag.IntegralOutContrib Loop.7.Diag.LoopBreakAlarm Loop.7.Diag.LoopMode Loop.7.Diag.PropOutContrib Loop.7.Diag.SBrk Part No HA028581 Issue 3 DEC 1324 1334 1320 1329 1339 1319 1328 1338 1344 1321 1331 1341 1322 1332 1342 1286 1323 1333 1299 1330 1340 1345 1343 1302 1303 1287 1305 1301 1304 1348 1349 1355 1292 1291 1350 1351 1359 1293 1294 1346 1347 1295 1356 1352 1353 1354 1357 1358 1388 1385 1386 1391 1392 1390 1389 1384 1655 1649 1654 1652 1650 1653 1656 Sep-05 HEX 052C 0536 0528 0531 053B 0527 0530 053A 0540 0529 0533 053D 052A 0534 053E 0506 052B 0535 0513 0532 053C 0541 053F 0516 0517 0507 0519 0515 0518 0544 0545 054B 050C 050B 0546 0547 054F 050D 050E 0542 0543 050F 054C 0548 0549 054A 054D 054E 056C 0569 056A 056F 0570 056E 056D 0568 0677 0671 0676 0674 0672 0675 0678 Mini8 Controller Engineering Handbook Parameter Description / Modbus address Loop.7.Diag.SchedCBH Loop.7.Diag.SchedCBL Loop.7.Diag.SchedLPBrk Loop.7.Diag.SchedMR Loop.7.Diag.SchedOPHi Loop.7.Diag.SchedOPLo Loop.7.Diag.SchedPB Loop.7.Diag.SchedR2G Loop.7.Diag.SchedTd Loop.7.Diag.SchedTi Loop.7.Diag.TargetOutVal Loop.7.Main.ActiveOut Loop.7.Main.AutoMan Loop.7.Main.Inhibit Loop.7.Main.PV Loop.7.Main.TargetSP Loop.7.Main.WorkingSP Loop.7.OP.Ch1OnOffHysteresis Loop.7.OP.Ch1Out Loop.7.OP.Ch2Deadband Loop.7.OP.Ch2OnOffHysteresis Loop.7.OP.Ch2Out Loop.7.OP.CoolType Loop.7.OP.EnablePowerFeedforward Loop.7.OP.FeedForwardGain Loop.7.OP.FeedForwardOffset Loop.7.OP.FeedForwardTrimLimit Loop.7.OP.FeedForwardType Loop.7.OP.FeedForwardVal Loop.7.OP.FF_Rem Loop.7.OP.ManualMode Loop.7.OP.ManualOutVal Loop.7.OP.MeasuredPower Loop.7.OP.OutputHighLimit Loop.7.OP.OutputLowLimit Loop.7.OP.Rate Loop.7.OP.RateDisable Loop.7.OP.RemOPH Loop.7.OP.RemOPL Loop.7.OP.SafeOutVal Loop.7.OP.SensorBreakMode Loop.7.OP.TrackEnable Loop.7.OP.TrackOutVal Loop.7.PID.ActiveSet Loop.7.PID.Boundary1-2 Loop.7.PID.Boundary2-3 Loop.7.PID.CutbackHigh Loop.7.PID.CutbackHigh2 Loop.7.PID.CutbackHigh3 Loop.7.PID.CutbackLow Loop.7.PID.CutbackLow2 Loop.7.PID.CutbackLow3 Loop.7.PID.DerivativeTime Loop.7.PID.DerivativeTime2 Loop.7.PID.DerivativeTime3 Loop.7.PID.IntegralTime Loop.7.PID.IntegralTime2 Loop.7.PID.IntegralTime3 Loop.7.PID.LoopBreakTime Loop.7.PID.LoopBreakTime2 Loop.7.PID.LoopBreakTime3 Loop.7.PID.ManualReset Loop.7.PID.ManualReset2 Part No HA028581 Issue 3 Sep-05 DEC 1568 1569 1571 1570 1573 1574 1565 1572 1567 1566 1651 1540 1546 1556 1537 1538 1541 1620 1618 1552 1621 1619 1629 1627 1631 1632 1633 1630 1634 1639 1626 1539 1628 1616 1617 1622 1623 1638 1637 1625 1624 1636 1635 1564 1562 1563 1554 1582 1592 1553 1583 1593 1545 1581 1591 1544 1580 1590 1576 1585 1595 1575 1584 HEX 0620 0621 0623 0622 0625 0626 061D 0624 061F 061E 0673 0604 060A 0614 0601 0602 0605 0654 0652 0610 0655 0653 065D 065B 065F 0660 0661 065E 0662 0667 065A 0603 065C 0650 0651 0656 0657 0666 0665 0659 0658 0664 0663 061C 061A 061B 0612 062E 0638 0611 062F 0639 0609 062D 0637 0608 062C 0636 0628 0631 063B 0627 0630 Parameter Description / Modbus address Loop.7.PID.ManualReset3 Loop.7.PID.NumSets Loop.7.PID.OutputHi Loop.7.PID.OutputHi2 Loop.7.PID.OutputHi3 Loop.7.PID.OutputLo Loop.7.PID.OutputLo2 Loop.7.PID.OutputLo3 Loop.7.PID.ProportionalBand Loop.7.PID.ProportionalBand2 Loop.7.PID.ProportionalBand3 Loop.7.PID.RelCh2Gain Loop.7.PID.RelCh2Gain2 Loop.7.PID.RelCh2Gain3 Loop.7.PID.SchedulerRemoteInput Loop.7.PID.SchedulerType Loop.7.Setup.CH1ControlType Loop.7.Setup.CH2ControlType Loop.7.Setup.ControlAction Loop.7.Setup.DerivativeType Loop.7.Setup.LoopType Loop.7.Setup.PBUnits Loop.7.SP.AltSP Loop.7.SP.AltSPSelect Loop.7.SP.ManualTrack Loop.7.SP.RangeHigh Loop.7.SP.RangeLow Loop.7.SP.Rate Loop.7.SP.RateDisable Loop.7.SP.RateDone Loop.7.SP.SP1 Loop.7.SP.SP2 Loop.7.SP.SPHighLimit Loop.7.SP.SPLowLimit Loop.7.SP.SPSelect Loop.7.SP.SPTrack Loop.7.SP.SPTrim Loop.7.SP.SPTrimHighLimit Loop.7.SP.SPTrimLowLimit Loop.7.SP.TrackPV Loop.7.SP.TrackSP Loop.7.Tune.AutotuneEnable Loop.7.Tune.OutputHighLimit Loop.7.Tune.OutputLowLimit Loop.7.Tune.Stage Loop.7.Tune.StageTime Loop.7.Tune.State Loop.7.Tune.StepSize Loop.7.Tune.Type Loop.8.Diag.DerivativeOutContrib Loop.8.Diag.Error Loop.8.Diag.IntegralOutContrib Loop.8.Diag.LoopBreakAlarm Loop.8.Diag.LoopMode Loop.8.Diag.PropOutContrib Loop.8.Diag.SBrk Loop.8.Diag.SchedCBH Loop.8.Diag.SchedCBL Loop.8.Diag.SchedLPBrk Loop.8.Diag.SchedMR Loop.8.Diag.SchedOPHi Loop.8.Diag.SchedOPLo Loop.8.Diag.SchedPB DEC 1594 1600 1577 1587 1597 1578 1588 1598 1542 1579 1589 1555 1586 1596 1601 1599 1558 1559 1543 1561 1557 1560 1604 1605 1611 1548 1547 1606 1607 1615 1549 1550 1602 1603 1551 1612 1608 1609 1610 1613 1614 1644 1641 1642 1647 1648 1646 1645 1640 1911 1905 1910 1908 1906 1909 1912 1824 1825 1827 1826 1829 1830 1821 225 HEX 063A 0640 0629 0633 063D 062A 0634 063E 0606 062B 0635 0613 0632 063C 0641 063F 0616 0617 0607 0619 0615 0618 0644 0645 064B 060C 060B 0646 0647 064F 060D 060E 0642 0643 060F 064C 0648 0649 064A 064D 064E 066C 0669 066A 066F 0670 066E 066D 0668 0777 0771 0776 0774 0772 0775 0778 0720 0721 0723 0722 0725 0726 071D Engineering Handbook Parameter Description / Modbus address Loop.8.Diag.SchedR2G Loop.8.Diag.SchedTd Loop.8.Diag.SchedTi Loop.8.Diag.TargetOutVal Loop.8.Main.ActiveOut Loop.8.Main.AutoMan Loop.8.Main.Inhibit Loop.8.Main.PV Loop.8.Main.TargetSP Loop.8.Main.WorkingSP Loop.8.OP.Ch1OnOffHysteresis Loop.8.OP.Ch1Out Loop.8.OP.Ch2Deadband Loop.8.OP.Ch2OnOffHysteresis Loop.8.OP.Ch2Out Loop.8.OP.CoolType Loop.8.OP.EnablePowerFeedforward Loop.8.OP.FeedForwardGain Loop.8.OP.FeedForwardOffset Loop.8.OP.FeedForwardTrimLimit Loop.8.OP.FeedForwardType Loop.8.OP.FeedForwardVal Loop.8.OP.FF_Rem Loop.8.OP.ManualMode Loop.8.OP.ManualOutVal Loop.8.OP.MeasuredPower Loop.8.OP.OutputHighLimit Loop.8.OP.OutputLowLimit Loop.8.OP.Rate Loop.8.OP.RateDisable Loop.8.OP.RemOPH Loop.8.OP.RemOPL Loop.8.OP.SafeOutVal Loop.8.OP.SensorBreakMode Loop.8.OP.TrackEnable Loop.8.OP.TrackOutVal Loop.8.PID.ActiveSet Loop.8.PID.Boundary1-2 Loop.8.PID.Boundary2-3 Loop.8.PID.CutbackHigh Loop.8.PID.CutbackHigh2 Loop.8.PID.CutbackHigh3 Loop.8.PID.CutbackLow Loop.8.PID.CutbackLow2 Loop.8.PID.CutbackLow3 Loop.8.PID.DerivativeTime Loop.8.PID.DerivativeTime2 Loop.8.PID.DerivativeTime3 Loop.8.PID.IntegralTime Loop.8.PID.IntegralTime2 Loop.8.PID.IntegralTime3 Loop.8.PID.LoopBreakTime Loop.8.PID.LoopBreakTime2 Loop.8.PID.LoopBreakTime3 Loop.8.PID.ManualReset Loop.8.PID.ManualReset2 Loop.8.PID.ManualReset3 Loop.8.PID.NumSets Loop.8.PID.OutputHi Loop.8.PID.OutputHi2 Loop.8.PID.OutputHi3 Loop.8.PID.OutputLo Loop.8.PID.OutputLo2 226 Mini8 Controller DEC 1828 1823 1822 1907 1796 1802 1812 1793 1794 1797 1876 1874 1808 1877 1875 1885 1883 1887 1888 1889 1886 1890 1895 1882 1795 1884 1872 1873 1878 1879 1894 1893 1881 1880 1892 1891 1820 1818 1819 1810 1838 1848 1809 1839 1849 1801 1837 1847 1800 1836 1846 1832 1841 1851 1831 1840 1850 1856 1833 1843 1853 1834 1844 HEX 0724 071F 071E 0773 0704 070A 0714 0701 0702 0705 0754 0752 0710 0755 0753 075D 075B 075F 0760 0761 075E 0762 0767 075A 0703 075C 0750 0751 0756 0757 0766 0765 0759 0758 0764 0763 071C 071A 071B 0712 072E 0738 0711 072F 0739 0709 072D 0737 0708 072C 0736 0728 0731 073B 0727 0730 073A 0740 0729 0733 073D 072A 0734 Parameter Description / Modbus address Loop.8.PID.OutputLo3 Loop.8.PID.ProportionalBand Loop.8.PID.ProportionalBand2 Loop.8.PID.ProportionalBand3 Loop.8.PID.RelCh2Gain Loop.8.PID.RelCh2Gain2 Loop.8.PID.RelCh2Gain3 Loop.8.PID.SchedulerRemoteInput Loop.8.PID.SchedulerType Loop.8.Setup.CH1ControlType Loop.8.Setup.CH2ControlType Loop.8.Setup.ControlAction Loop.8.Setup.DerivativeType Loop.8.Setup.LoopType Loop.8.Setup.PBUnits Loop.8.SP.AltSP Loop.8.SP.AltSPSelect Loop.8.SP.ManualTrack Loop.8.SP.RangeHigh Loop.8.SP.RangeLow Loop.8.SP.Rate Loop.8.SP.RateDisable Loop.8.SP.RateDone Loop.8.SP.SP1 Loop.8.SP.SP2 Loop.8.SP.SPHighLimit Loop.8.SP.SPLowLimit Loop.8.SP.SPSelect Loop.8.SP.SPTrack Loop.8.SP.SPTrim Loop.8.SP.SPTrimHighLimit Loop.8.SP.SPTrimLowLimit Loop.8.SP.TrackPV Loop.8.SP.TrackSP Loop.8.Tune.AutotuneEnable Loop.8.Tune.OutputHighLimit Loop.8.Tune.OutputLowLimit Loop.8.Tune.Stage Loop.8.Tune.StageTime Loop.8.Tune.State Loop.8.Tune.StepSize Loop.8.Tune.Type Loop.9.Diag.DerivativeOutContrib Loop.9.Diag.Error Loop.9.Diag.IntegralOutContrib Loop.9.Diag.LoopBreakAlarm Loop.9.Diag.LoopMode Loop.9.Diag.PropOutContrib Loop.9.Diag.SBrk Loop.9.Diag.SchedCBH Loop.9.Diag.SchedCBL Loop.9.Diag.SchedLPBrk Loop.9.Diag.SchedMR Loop.9.Diag.SchedOPHi Loop.9.Diag.SchedOPLo Loop.9.Diag.SchedPB Loop.9.Diag.SchedR2G Loop.9.Diag.SchedTd Loop.9.Diag.SchedTi Loop.9.Diag.TargetOutVal Loop.9.Main.ActiveOut Loop.9.Main.AutoMan Loop.9.Main.Inhibit Part No HA028581 Issue 3 DEC 1854 1798 1835 1845 1811 1842 1852 1857 1855 1814 1815 1799 1817 1813 1816 1860 1861 1867 1804 1803 1862 1863 1871 1805 1806 1858 1859 1807 1868 1864 1865 1866 1869 1870 1900 1897 1898 1903 1904 1902 1901 1896 2167 2161 2166 2164 2162 2165 2168 2080 2081 2083 2082 2085 2086 2077 2084 2079 2078 2163 2052 2058 2068 Sep-05 HEX 073E 0706 072B 0735 0713 0732 073C 0741 073F 0716 0717 0707 0719 0715 0718 0744 0745 074B 070C 070B 0746 0747 074F 070D 070E 0742 0743 070F 074C 0748 0749 074A 074D 074E 076C 0769 076A 076F 0770 076E 076D 0768 0877 0871 0876 0874 0872 0875 0878 0820 0821 0823 0822 0825 0826 081D 0824 081F 081E 0873 0804 080A 0814 Mini8 Controller Engineering Handbook Parameter Description / Modbus address Loop.9.Main.PV Loop.9.Main.TargetSP Loop.9.Main.WorkingSP Loop.9.OP.Ch1OnOffHysteresis Loop.9.OP.Ch1Out Loop.9.OP.Ch2Deadband Loop.9.OP.Ch2OnOffHysteresis Loop.9.OP.Ch2Out Loop.9.OP.CoolType Loop.9.OP.EnablePowerFeedforward Loop.9.OP.FeedForwardGain Loop.9.OP.FeedForwardOffset Loop.9.OP.FeedForwardTrimLimit Loop.9.OP.FeedForwardType Loop.9.OP.FeedForwardVal Loop.9.OP.FF_Rem Loop.9.OP.ManualMode Loop.9.OP.ManualOutVal Loop.9.OP.MeasuredPower Loop.9.OP.OutputHighLimit Loop.9.OP.OutputLowLimit Loop.9.OP.Rate Loop.9.OP.RateDisable Loop.9.OP.RemOPH Loop.9.OP.RemOPL Loop.9.OP.SafeOutVal Loop.9.OP.SensorBreakMode Loop.9.OP.TrackEnable Loop.9.OP.TrackOutVal Loop.9.PID.ActiveSet Loop.9.PID.Boundary1-2 Loop.9.PID.Boundary2-3 Loop.9.PID.CutbackHigh Loop.9.PID.CutbackHigh2 Loop.9.PID.CutbackHigh3 Loop.9.PID.CutbackLow Loop.9.PID.CutbackLow2 Loop.9.PID.CutbackLow3 Loop.9.PID.DerivativeTime Loop.9.PID.DerivativeTime2 Loop.9.PID.DerivativeTime3 Loop.9.PID.IntegralTime Loop.9.PID.IntegralTime2 Loop.9.PID.IntegralTime3 Loop.9.PID.LoopBreakTime Loop.9.PID.LoopBreakTime2 Loop.9.PID.LoopBreakTime3 Loop.9.PID.ManualReset Loop.9.PID.ManualReset2 Loop.9.PID.ManualReset3 Loop.9.PID.NumSets Loop.9.PID.OutputHi Loop.9.PID.OutputHi2 Loop.9.PID.OutputHi3 Loop.9.PID.OutputLo Loop.9.PID.OutputLo2 Loop.9.PID.OutputLo3 Loop.9.PID.ProportionalBand Loop.9.PID.ProportionalBand2 Loop.9.PID.ProportionalBand3 Loop.9.PID.RelCh2Gain Loop.9.PID.RelCh2Gain2 Loop.9.PID.RelCh2Gain3 Part No HA028581 Issue 3 Sep-05 DEC 2049 2050 2053 2132 2130 2064 2133 2131 2141 2139 2143 2144 2145 2142 2146 2151 2138 2051 2140 2128 2129 2134 2135 2150 2149 2137 2136 2148 2147 2076 2074 2075 2066 2094 2104 2065 2095 2105 2057 2093 2103 2056 2092 2102 2088 2097 2107 2087 2096 2106 2112 2089 2099 2109 2090 2100 2110 2054 2091 2101 2067 2098 2108 HEX 0801 0802 0805 0854 0852 0810 0855 0853 085D 085B 085F 0860 0861 085E 0862 0867 085A 0803 085C 0850 0851 0856 0857 0866 0865 0859 0858 0864 0863 081C 081A 081B 0812 082E 0838 0811 082F 0839 0809 082D 0837 0808 082C 0836 0828 0831 083B 0827 0830 083A 0840 0829 0833 083D 082A 0834 083E 0806 082B 0835 0813 0832 083C Parameter Description / Modbus address Loop.9.PID.SchedulerRemoteInput Loop.9.PID.SchedulerType Loop.9.Setup.CH1ControlType Loop.9.Setup.CH2ControlType Loop.9.Setup.ControlAction Loop.9.Setup.DerivativeType Loop.9.Setup.LoopType Loop.9.Setup.PBUnits Loop.9.SP.AltSP Loop.9.SP.AltSPSelect Loop.9.SP.ManualTrack Loop.9.SP.RangeHigh Loop.9.SP.RangeLow Loop.9.SP.Rate Loop.9.SP.RateDisable Loop.9.SP.RateDone Loop.9.SP.SP1 Loop.9.SP.SP2 Loop.9.SP.SPHighLimit Loop.9.SP.SPLowLimit Loop.9.SP.SPSelect Loop.9.SP.SPTrack Loop.9.SP.SPTrim Loop.9.SP.SPTrimHighLimit Loop.9.SP.SPTrimLowLimit Loop.9.SP.TrackPV Loop.9.SP.TrackSP Loop.9.Tune.AutotuneEnable Loop.9.Tune.OutputHighLimit Loop.9.Tune.OutputLowLimit Loop.9.Tune.Stage Loop.9.Tune.StageTime Loop.9.Tune.State Loop.9.Tune.StepSize Loop.9.Tune.Type Loop.10.Diag.DerivativeOutContrib Loop.10.Diag.Error Loop.10.Diag.IntegralOutContrib Loop.10.Diag.LoopBreakAlarm Loop.10.Diag.LoopMode Loop.10.Diag.PropOutContrib Loop.10.Diag.SBrk Loop.10.Diag.SchedCBH Loop.10.Diag.SchedCBL Loop.10.Diag.SchedLPBrk Loop.10.Diag.SchedMR Loop.10.Diag.SchedOPHi Loop.10.Diag.SchedOPLo Loop.10.Diag.SchedPB Loop.10.Diag.SchedR2G Loop.10.Diag.SchedTd Loop.10.Diag.SchedTi Loop.10.Diag.TargetOutVal Loop.10.Main.ActiveOut Loop.10.Main.AutoMan Loop.10.Main.Inhibit Loop.10.Main.PV Loop.10.Main.TargetSP Loop.10.Main.WorkingSP Loop.10.OP.Ch1OnOffHysteresis Loop.10.OP.Ch1Out Loop.10.OP.Ch2Deadband Loop.10.OP.Ch2OnOffHysteresis DEC 2113 2111 2070 2071 2055 2073 2069 2072 2116 2117 2123 2060 2059 2118 2119 2127 2061 2062 2114 2115 2063 2124 2120 2121 2122 2125 2126 2156 2153 2154 2159 2160 2158 2157 2152 2423 2417 2422 2420 2418 2421 2424 2336 2337 2339 2338 2341 2342 2333 2340 2335 2334 2419 2308 2314 2324 2305 2306 2309 2388 2386 2320 2389 227 HEX 0841 083F 0816 0817 0807 0819 0815 0818 0844 0845 084B 080C 080B 0846 0847 084F 080D 080E 0842 0843 080F 084C 0848 0849 084A 084D 084E 086C 0869 086A 086F 0870 086E 086D 0868 0977 0971 0976 0974 0972 0975 0978 0920 0921 0923 0922 0925 0926 091D 0924 091F 091E 0973 0904 090A 0914 0901 0902 0905 0954 0952 0910 0955 Engineering Handbook Parameter Description / Modbus address Loop.10.OP.Ch2Out Loop.10.OP.CoolType Loop.10.OP.EnablePowerFeedforward Loop.10.OP.FeedForwardGain Loop.10.OP.FeedForwardOffset Loop.10.OP.FeedForwardTrimLimit Loop.10.OP.FeedForwardType Loop.10.OP.FeedForwardVal Loop.10.OP.FF_Rem Loop.10.OP.ManualMode Loop.10.OP.ManualOutVal Loop.10.OP.MeasuredPower Loop.10.OP.OutputHighLimit Loop.10.OP.OutputLowLimit Loop.10.OP.Rate Loop.10.OP.RateDisable Loop.10.OP.RemOPH Loop.10.OP.RemOPL Loop.10.OP.SafeOutVal Loop.10.OP.SensorBreakMode Loop.10.OP.TrackEnable Loop.10.OP.TrackOutVal Loop.10.PID.ActiveSet Loop.10.PID.Boundary1-2 Loop.10.PID.Boundary2-3 Loop.10.PID.CutbackHigh Loop.10.PID.CutbackHigh2 Loop.10.PID.CutbackHigh3 Loop.10.PID.CutbackLow Loop.10.PID.CutbackLow2 Loop.10.PID.CutbackLow3 Loop.10.PID.DerivativeTime Loop.10.PID.DerivativeTime2 Loop.10.PID.DerivativeTime3 Loop.10.PID.IntegralTime Loop.10.PID.IntegralTime2 Loop.10.PID.IntegralTime3 Loop.10.PID.LoopBreakTime Loop.10.PID.LoopBreakTime2 Loop.10.PID.LoopBreakTime3 Loop.10.PID.ManualReset Loop.10.PID.ManualReset2 Loop.10.PID.ManualReset3 Loop.10.PID.NumSets Loop.10.PID.OutputHi Loop.10.PID.OutputHi2 Loop.10.PID.OutputHi3 Loop.10.PID.OutputLo Loop.10.PID.OutputLo2 Loop.10.PID.OutputLo3 Loop.10.PID.ProportionalBand Loop.10.PID.ProportionalBand2 Loop.10.PID.ProportionalBand3 Loop.10.PID.RelCh2Gain Loop.10.PID.RelCh2Gain2 Loop.10.PID.RelCh2Gain3 Loop.10.PID.SchedulerRemoteInput Loop.10.PID.SchedulerType Loop.10.Setup.CH1ControlType Loop.10.Setup.CH2ControlType Loop.10.Setup.ControlAction Loop.10.Setup.DerivativeType Loop.10.Setup.LoopType 228 Mini8 Controller DEC 2387 2397 2395 2399 2400 2401 2398 2402 2407 2394 2307 2396 2384 2385 2390 2391 2406 2405 2393 2392 2404 2403 2332 2330 2331 2322 2350 2360 2321 2351 2361 2313 2349 2359 2312 2348 2358 2344 2353 2363 2343 2352 2362 2368 2345 2355 2365 2346 2356 2366 2310 2347 2357 2323 2354 2364 2369 2367 2326 2327 2311 2329 2325 HEX 0953 095D 095B 095F 0960 0961 095E 0962 0967 095A 0903 095C 0950 0951 0956 0957 0966 0965 0959 0958 0964 0963 091C 091A 091B 0912 092E 0938 0911 092F 0939 0909 092D 0937 0908 092C 0936 0928 0931 093B 0927 0930 093A 0940 0929 0933 093D 092A 0934 093E 0906 092B 0935 0913 0932 093C 0941 093F 0916 0917 0907 0919 0915 Parameter Description / Modbus address Loop.10.Setup.PBUnits Loop.10.SP.AltSP Loop.10.SP.AltSPSelect Loop.10.SP.ManualTrack Loop.10.SP.RangeHigh Loop.10.SP.RangeLow Loop.10.SP.Rate Loop.10.SP.RateDisable Loop.10.SP.RateDone Loop.10.SP.SP1 Loop.10.SP.SP2 Loop.10.SP.SPHighLimit Loop.10.SP.SPLowLimit Loop.10.SP.SPSelect Loop.10.SP.SPTrack Loop.10.SP.SPTrim Loop.10.SP.SPTrimHighLimit Loop.10.SP.SPTrimLowLimit Loop.10.SP.TrackPV Loop.10.SP.TrackSP Loop.10.Tune.AutotuneEnable Loop.10.Tune.OutputHighLimit Loop.10.Tune.OutputLowLimit Loop.10.Tune.Stage Loop.10.Tune.StageTime Loop.10.Tune.State Loop.10.Tune.StepSize Loop.10.Tune.Type Loop.11.Diag.DerivativeOutContrib Loop.11.Diag.Error Loop.11.Diag.IntegralOutContrib Loop.11.Diag.LoopBreakAlarm Loop.11.Diag.LoopMode Loop.11.Diag.PropOutContrib Loop.11.Diag.SBrk Loop.11.Diag.SchedCBH Loop.11.Diag.SchedCBL Loop.11.Diag.SchedLPBrk Loop.11.Diag.SchedMR Loop.11.Diag.SchedOPHi Loop.11.Diag.SchedOPLo Loop.11.Diag.SchedPB Loop.11.Diag.SchedR2G Loop.11.Diag.SchedTd Loop.11.Diag.SchedTi Loop.11.Diag.TargetOutVal Loop.11.Main.ActiveOut Loop.11.Main.AutoMan Loop.11.Main.Inhibit Loop.11.Main.PV Loop.11.Main.TargetSP Loop.11.Main.WorkingSP Loop.11.OP.Ch1OnOffHysteresis Loop.11.OP.Ch1Out Loop.11.OP.Ch2Deadband Loop.11.OP.Ch2OnOffHysteresis Loop.11.OP.Ch2Out Loop.11.OP.CoolType Loop.11.OP.EnablePowerFeedforward Loop.11.OP.FeedForwardGain Loop.11.OP.FeedForwardOffset Loop.11.OP.FeedForwardTrimLimit Loop.11.OP.FeedForwardType Part No HA028581 Issue 3 DEC 2328 2372 2373 2379 2316 2315 2374 2375 2383 2317 2318 2370 2371 2319 2380 2376 2377 2378 2381 2382 2412 2409 2410 2415 2416 2414 2413 2408 2679 2673 2678 2676 2674 2677 2680 2592 2593 2595 2594 2597 2598 2589 2596 2591 2590 2675 2564 2570 2580 2561 2562 2565 2644 2642 2576 2645 2643 2653 2651 2655 2656 2657 2654 Sep-05 HEX 0918 0944 0945 094B 090C 090B 0946 0947 094F 090D 090E 0942 0943 090F 094C 0948 0949 094A 094D 094E 096C 0969 096A 96F 0970 096E 096D 0968 0A77 0A71 0A76 0A74 0A72 0A75 0A78 0A20 0A21 0A23 0A22 0A25 0A26 0A1D 0A24 0A1F 0A1E 0A73 0A04 0A0A 0A14 0A01 0A02 0A05 0A54 0A52 0A10 0A55 0A53 0A5D 0A5B 0A5F 0A60 0A61 0A5E Mini8 Controller Engineering Handbook Parameter Description / Modbus address Loop.11.OP.FeedForwardVal Loop.11.OP.FF_Rem Loop.11.OP.ManualMode Loop.11.OP.ManualOutVal Loop.11.OP.MeasuredPower Loop.11.OP.OutputHighLimit Loop.11.OP.OutputLowLimit Loop.11.OP.Rate Loop.11.OP.RateDisable Loop.11.OP.RemOPH Loop.11.OP.RemOPL Loop.11.OP.SafeOutVal Loop.11.OP.SensorBreakMode Loop.11.OP.TrackEnable Loop.11.OP.TrackOutVal Loop.11.PID.ActiveSet Loop.11.PID.Boundary1-2 Loop.11.PID.Boundary2-3 Loop.11.PID.CutbackHigh Loop.11.PID.CutbackHigh2 Loop.11.PID.CutbackHigh3 Loop.11.PID.CutbackLow Loop.11.PID.CutbackLow2 Loop.11.PID.CutbackLow3 Loop.11.PID.DerivativeTime Loop.11.PID.DerivativeTime2 Loop.11.PID.DerivativeTime3 Loop.11.PID.IntegralTime Loop.11.PID.IntegralTime2 Loop.11.PID.IntegralTime3 Loop.11.PID.LoopBreakTime Loop.11.PID.LoopBreakTime2 Loop.11.PID.LoopBreakTime3 Loop.11.PID.ManualReset Loop.11.PID.ManualReset2 Loop.11.PID.ManualReset3 Loop.11.PID.NumSets Loop.11.PID.OutputHi Loop.11.PID.OutputHi2 Loop.11.PID.OutputHi3 Loop.11.PID.OutputLo Loop.11.PID.OutputLo2 Loop.11.PID.OutputLo3 Loop.11.PID.ProportionalBand Loop.11.PID.ProportionalBand2 Loop.11.PID.ProportionalBand3 Loop.11.PID.RelCh2Gain Loop.11.PID.RelCh2Gain2 Loop.11.PID.RelCh2Gain3 Loop.11.PID.SchedulerRemoteInput Loop.11.PID.SchedulerType Loop.11.Setup.CH1ControlType Loop.11.Setup.CH2ControlType Loop.11.Setup.ControlAction Loop.11.Setup.DerivativeType Loop.11.Setup.LoopType Loop.11.Setup.PBUnits Loop.11.SP.AltSP Loop.11.SP.AltSPSelect Loop.11.SP.ManualTrack Loop.11.SP.RangeHigh Loop.11.SP.RangeLow Loop.11.SP.Rate Part No HA028581 Issue 3 Sep-05 DEC 2658 2663 2650 2563 2652 2640 2641 2646 2647 2662 2661 2649 2648 2660 2659 2588 2586 2587 2578 2606 2616 2577 2607 2617 2569 2605 2615 2568 2604 2614 2600 2609 2619 2599 2608 2618 2624 2601 2611 2621 2602 2612 2622 2566 2603 2613 2579 2610 2620 2625 2623 2582 2583 2567 2585 2581 2584 2628 2629 2635 2572 2571 2630 HEX 0A62 0A67 0A5A 0A03 0A5C 0A50 0A51 0A56 0A57 0A66 0A65 0A59 0A58 0A64 0A63 0A1C 0A1A 0A1B 0A12 0A2E 0A38 0A11 0A2F 0A39 0A09 0A2D 0A37 0A08 0A2C 0A36 0A28 0A31 0A3B 0A27 0A30 0A3A 0A40 0A29 0A33 0A3D 0A2A 0A34 0A3E 0A06 0A2B 0A35 0A13 0A32 0A3C 0A41 0A3F 0A16 0A17 0A07 0A19 0A15 0A18 0A44 0A45 0A4B 0A0C 0A0B 0A46 Parameter Description / Modbus address Loop.11.SP.RateDisable Loop.11.SP.RateDone Loop.11.SP.SP1 Loop.11.SP.SP2 Loop.11.SP.SPHighLimit Loop.11.SP.SPLowLimit Loop.11.SP.SPSelect Loop.11.SP.SPTrack Loop.11.SP.SPTrim Loop.11.SP.SPTrimHighLimit Loop.11.SP.SPTrimLowLimit Loop.11.SP.TrackPV Loop.11.SP.TrackSP Loop.11.Tune.AutotuneEnable Loop.11.Tune.OutputHighLimit Loop.11.Tune.OutputLowLimit Loop.11.Tune.Stage Loop.11.Tune.StageTime Loop.11.Tune.State Loop.11.Tune.StepSize Loop.11.Tune.Type Loop.12.Diag.DerivativeOutContrib Loop.12.Diag.Error Loop.12.Diag.IntegralOutContrib Loop.12.Diag.LoopBreakAlarm Loop.12.Diag.LoopMode Loop.12.Diag.PropOutContrib Loop.12.Diag.SBrk Loop.12.Diag.SchedCBH Loop.12.Diag.SchedCBL Loop.12.Diag.SchedLPBrk Loop.12.Diag.SchedMR Loop.12.Diag.SchedOPHi Loop.12.Diag.SchedOPLo Loop.12.Diag.SchedPB Loop.12.Diag.SchedR2G Loop.12.Diag.SchedTd Loop.12.Diag.SchedTi Loop.12.Diag.TargetOutVal Loop.12.Main.ActiveOut Loop.12.Main.AutoMan Loop.12.Main.Inhibit Loop.12.Main.PV Loop.12.Main.TargetSP Loop.12.Main.WorkingSP Loop.12.OP.Ch1OnOffHysteresis Loop.12.OP.Ch1Out Loop.12.OP.Ch2Deadband Loop.12.OP.Ch2OnOffHysteresis Loop.12.OP.Ch2Out Loop.12.OP.CoolType Loop.12.OP.EnablePowerFeedforward Loop.12.OP.FeedForwardGain Loop.12.OP.FeedForwardOffset Loop.12.OP.FeedForwardTrimLimit Loop.12.OP.FeedForwardType Loop.12.OP.FeedForwardVal Loop.12.OP.FF_Rem Loop.12.OP.ManualMode Loop.12.OP.ManualOutVal Loop.12.OP.MeasuredPower Loop.12.OP.OutputHighLimit Loop.12.OP.OutputLowLimit DEC 2631 2639 2573 2574 2626 2627 2575 2636 2632 2633 2634 2637 2638 2668 2665 2666 2671 2672 2670 2669 2664 2935 2929 2934 2932 2930 2933 2936 2848 2849 2851 2850 2853 2854 2845 2852 2847 2846 2931 2820 2826 2836 2817 2818 2821 2900 2898 2832 2901 2899 2909 2907 2911 2912 2913 2910 2914 2919 2906 2819 2908 2896 2897 229 HEX 0A47 0A4F 0A0D 0A0E 0A42 0A43 0A0F 0A4C 0A48 0A49 0A4A 0A4D 0A4E 0A6C 0A69 0A6A 0A6F 0A70 0A6E 0A6D 0A68 0B77 0B71 0B76 0B74 0B72 0B75 0B78 0B20 0B21 0B23 0B22 0B25 0B26 0B1D 0B24 0B1F 0B1E 0B73 0B04 0B0A 0B14 0B01 0B02 0B05 0B54 0B52 0B10 0B55 0B53 0B5D 0B5B 0B5F 0B60 0B61 0B5E 0B62 0B67 0B5A 0B03 0B5C 0B50 0B51 Engineering Handbook Parameter Description / Modbus address Loop.12.OP.Rate Loop.12.OP.RateDisable Loop.12.OP.RemOPH Loop.12.OP.RemOPL Loop.12.OP.SafeOutVal Loop.12.OP.SensorBreakMode Loop.12.OP.TrackEnable Loop.12.OP.TrackOutVal Loop.12.PID.ActiveSet Loop.12.PID.Boundary1-2 Loop.12.PID.Boundary2-3 Loop.12.PID.CutbackHigh Loop.12.PID.CutbackHigh2 Loop.12.PID.CutbackHigh3 Loop.12.PID.CutbackLow Loop.12.PID.CutbackLow2 Loop.12.PID.CutbackLow3 Loop.12.PID.DerivativeTime Loop.12.PID.DerivativeTime2 Loop.12.PID.DerivativeTime3 Loop.12.PID.IntegralTime Loop.12.PID.IntegralTime2 Loop.12.PID.IntegralTime3 Loop.12.PID.LoopBreakTime Loop.12.PID.LoopBreakTime2 Loop.12.PID.LoopBreakTime3 Loop.12.PID.ManualReset Loop.12.PID.ManualReset2 Loop.12.PID.ManualReset3 Loop.12.PID.NumSets Loop.12.PID.OutputHi Loop.12.PID.OutputHi2 Loop.12.PID.OutputHi3 Loop.12.PID.OutputLo Loop.12.PID.OutputLo2 Loop.12.PID.OutputLo3 Loop.12.PID.ProportionalBand Loop.12.PID.ProportionalBand2 Loop.12.PID.ProportionalBand3 Loop.12.PID.RelCh2Gain Loop.12.PID.RelCh2Gain2 Loop.12.PID.RelCh2Gain3 Loop.12.PID.SchedulerRemoteInput Loop.12.PID.SchedulerType Loop.12.Setup.CH1ControlType Loop.12.Setup.CH2ControlType Loop.12.Setup.ControlAction Loop.12.Setup.DerivativeType Loop.12.Setup.LoopType Loop.12.Setup.PBUnits Loop.12.SP.AltSP Loop.12.SP.AltSPSelect Loop.12.SP.ManualTrack Loop.12.SP.RangeHigh Loop.12.SP.RangeLow Loop.12.SP.Rate Loop.12.SP.RateDisable Loop.12.SP.RateDone Loop.12.SP.SP1 Loop.12.SP.SP2 Loop.12.SP.SPHighLimit Loop.12.SP.SPLowLimit Loop.12.SP.SPSelect 230 Mini8 Controller DEC 2902 2903 2918 2917 2905 2904 2916 2915 2844 2842 2843 2834 2862 2872 2833 2863 2873 2825 2861 2871 2824 2860 2870 2856 2865 2875 2855 2864 2874 2880 2857 2867 2877 2858 2868 2878 2822 2859 2869 2835 2866 2876 2881 2879 2838 2839 2823 2841 2837 2840 2884 2885 2891 2828 2827 2886 2887 2895 2829 2830 2882 2883 2831 HEX 0B56 0B57 0B66 0B65 0B59 0B58 0B64 0B63 0B1C 0B1A 0B1B 0B12 0B2E 0B38 0B11 0B2F 0B39 0B09 0B2D 0B37 0B08 0B2C 0B36 0B28 0B31 0B3B 0B27 0B30 0B3A 0B40 0B29 0B33 0B3D 0B2A 0B34 0B3E 0B06 0B2B 0B35 0B13 0B32 0B3C 0B41 0B3F 0B16 0B17 0B07 0B19 0B15 0B18 0B44 0B45 0B4B 0B0C 0B0B 0B46 0B47 0B4F 0B0D 0B0E 0B42 0B43 0B0F Parameter Description / Modbus address Loop.12.SP.SPTrack Loop.12.SP.SPTrim Loop.12.SP.SPTrimHighLimit Loop.12.SP.SPTrimLowLimit Loop.12.SP.TrackPV Loop.12.SP.TrackSP Loop.12.Tune.AutotuneEnable Loop.12.Tune.OutputHighLimit Loop.12.Tune.OutputLowLimit Loop.12.Tune.Stage Loop.12.Tune.StageTime Loop.12.Tune.State Loop.12.Tune.StepSize Loop.12.Tune.Type Loop.13.Diag.DerivativeOutContrib Loop.13.Diag.Error Loop.13.Diag.IntegralOutContrib Loop.13.Diag.LoopBreakAlarm Loop.13.Diag.LoopMode Loop.13.Diag.PropOutContrib Loop.13.Diag.SBrk Loop.13.Diag.SchedCBH Loop.13.Diag.SchedCBL Loop.13.Diag.SchedLPBrk Loop.13.Diag.SchedMR Loop.13.Diag.SchedOPHi Loop.13.Diag.SchedOPLo Loop.13.Diag.SchedPB Loop.13.Diag.SchedR2G Loop.13.Diag.SchedTd Loop.13.Diag.SchedTi Loop.13.Diag.TargetOutVal Loop.13.Main.ActiveOut Loop.13.Main.AutoMan Loop.13.Main.Inhibit Loop.13.Main.PV Loop.13.Main.TargetSP Loop.13.Main.WorkingSP Loop.13.OP.Ch1OnOffHysteresis Loop.13.OP.Ch1Out Loop.13.OP.Ch2Deadband Loop.13.OP.Ch2OnOffHysteresis Loop.13.OP.Ch2Out Loop.13.OP.CoolType Loop.13.OP.EnablePowerFeedforward Loop.13.OP.FeedForwardGain Loop.13.OP.FeedForwardOffset Loop.13.OP.FeedForwardTrimLimit Loop.13.OP.FeedForwardType Loop.13.OP.FeedForwardVal Loop.13.OP.FF_Rem Loop.13.OP.ManualMode Loop.13.OP.ManualOutVal Loop.13.OP.MeasuredPower Loop.13.OP.OutputHighLimit Loop.13.OP.OutputLowLimit Loop.13.OP.Rate Loop.13.OP.RateDisable Loop.13.OP.RemOPH Loop.13.OP.RemOPL Loop.13.OP.SafeOutVal Loop.13.OP.SensorBreakMode Loop.13.OP.TrackEnable Part No HA028581 Issue 3 DEC 2892 2888 2889 2890 2893 2894 2924 2921 2922 2927 2928 2926 2925 2920 3191 3185 3190 3188 3186 3189 3192 3104 3105 3107 3106 3109 3110 3101 3108 3103 3102 3187 3076 3082 3092 3073 3074 3077 3156 3154 3088 3157 3155 3165 3163 3167 3168 3169 3166 3170 3175 3162 3075 3164 3152 3153 3158 3159 3174 3173 3161 3160 3172 Sep-05 HEX 0B4C 0B48 0B49 0B4A 0B4D 0B4E 0B6C 0B69 0B6A 0B6F 0B70 0B6E 0B6D 0B68 0C77 0C71 0C76 0C74 0C72 0C75 0C78 0C20 0C21 0C23 0C22 0C25> 0C26 0C1D 0C24 0C1F 0C1E 0C73 0C04 0C0A 0C14 0C01 0C02 0C05 0C54 0C52 0C10 0C55 0C53 0C5D 0C5B 0C5F 0C60 0C61 0C5E 0C62 0C67 0C5A 0C03 0C5C 0C50 0C51 0C56 0C57 0C66 0C65 0C59 0C58 0C64 Mini8 Controller Engineering Handbook Parameter Description / Modbus address Loop.13.OP.TrackOutVal Loop.13.PID.ActiveSet Loop.13.PID.Boundary1-2 Loop.13.PID.Boundary2-3 Loop.13.PID.CutbackHigh Loop.13.PID.CutbackHigh2 Loop.13.PID.CutbackHigh3 Loop.13.PID.CutbackLow Loop.13.PID.CutbackLow2 Loop.13.PID.CutbackLow3 Loop.13.PID.DerivativeTime Loop.13.PID.DerivativeTime2 Loop.13.PID.DerivativeTime3 Loop.13.PID.IntegralTime Loop.13.PID.IntegralTime2 Loop.13.PID.IntegralTime3 Loop.13.PID.LoopBreakTime Loop.13.PID.LoopBreakTime2 Loop.13.PID.LoopBreakTime3 Loop.13.PID.ManualReset Loop.13.PID.ManualReset2 Loop.13.PID.ManualReset3 Loop.13.PID.NumSets Loop.13.PID.OutputHi Loop.13.PID.OutputHi2 Loop.13.PID.OutputHi3 Loop.13.PID.OutputLo Loop.13.PID.OutputLo2 Loop.13.PID.OutputLo3 Loop.13.PID.ProportionalBand Loop.13.PID.ProportionalBand2 Loop.13.PID.ProportionalBand3 Loop.13.PID.RelCh2Gain Loop.13.PID.RelCh2Gain2 Loop.13.PID.RelCh2Gain3 Loop.13.PID.SchedulerRemoteInput Loop.13.PID.SchedulerType Loop.13.Setup.CH1ControlType Loop.13.Setup.CH2ControlType Loop.13.Setup.ControlAction Loop.13.Setup.DerivativeType Loop.13.Setup.LoopType Loop.13.Setup.PBUnits Loop.13.SP.AltSP Loop.13.SP.AltSPSelect Loop.13.SP.ManualTrack Loop.13.SP.RangeHigh Loop.13.SP.RangeLow Loop.13.SP.Rate Loop.13.SP.RateDisable Loop.13.SP.RateDone Loop.13.SP.SP1 Loop.13.SP.SP2 Loop.13.SP.SPHighLimit Loop.13.SP.SPLowLimit Loop.13.SP.SPSelect Loop.13.SP.SPTrack Loop.13.SP.SPTrim Loop.13.SP.SPTrimHighLimit Loop.13.SP.SPTrimLowLimit Loop.13.SP.TrackPV Loop.13.SP.TrackSP Loop.13.Tune.AutotuneEnable Part No HA028581 Issue 3 Sep-05 DEC 3171 3100 3098 3099 3090 3118 3128 3089 3119 3129 3081 3117 3127 3080 3116 3126 3112 3121 3131 3111 3120 3130 3136 3113 3123 3133 3114 3124 3134 3078 3115 3125 3091 3122 3132 3137 3135 3094 3095 3079 3097 3093 3096 3140 3141 3147 3084 3083 3142 3143 3151 3085 3086 3138 3139 3087 3148 3144 3145 3146 3149 3150 3180 HEX 0C63 0C1C 0C1A 0C1B 0C12 0C2E 0C38 0C11 0C2F 0C39 0C09 0C2D 0C37 0C08 0C2C 0C36 0C28 0C31 0C3B 0C27 0C30 0C3A 0C40 0C29 0C33 0C3D 0C2A 0C34 0C3E 0C06 0C2B 0C35 0C13 0C32 0C3C 0C41 0C3F 0C16 0C17 0C07 0C19 0C15 0C18 0C44 0C45 0C4B 0C0C 0C0B 0C46 0C47 0C4F 0C0D 0C0E 0C42 0C43 0C0F 0C4C 0C48 0C49 0C4A 0C4D 0C4E 0C6C Parameter Description / Modbus address Loop.13.Tune.OutputHighLimit Loop.13.Tune.OutputLowLimit Loop.13.Tune.Stage Loop.13.Tune.StageTime Loop.13.Tune.State Loop.13.Tune.StepSize Loop.13.Tune.Type Loop.14.Diag.DerivativeOutContrib Loop.14.Diag.Error Loop.14.Diag.IntegralOutContrib Loop.14.Diag.LoopBreakAlarm Loop.14.Diag.LoopMode Loop.14.Diag.PropOutContrib Loop.14.Diag.SBrk Loop.14.Diag.SchedCBH Loop.14.Diag.SchedCBL Loop.14.Diag.SchedLPBrk Loop.14.Diag.SchedMR Loop.14.Diag.SchedOPHi Loop.14.Diag.SchedOPLo Loop.14.Diag.SchedPB Loop.14.Diag.SchedR2G Loop.14.Diag.SchedTd Loop.14.Diag.SchedTi Loop.14.Diag.TargetOutVal Loop.14.Main.ActiveOut Loop.14.Main.AutoMan Loop.14.Main.Inhibit Loop.14.Main.PV Loop.14.Main.TargetSP Loop.14.Main.WorkingSP Loop.14.OP.Ch1OnOffHysteresis Loop.14.OP.Ch1Out Loop.14.OP.Ch2Deadband Loop.14.OP.Ch2OnOffHysteresis Loop.14.OP.Ch2Out Loop.14.OP.CoolType Loop.14.OP.EnablePowerFeedforward Loop.14.OP.FeedForwardGain Loop.14.OP.FeedForwardOffset Loop.14.OP.FeedForwardTrimLimit Loop.14.OP.FeedForwardType Loop.14.OP.FeedForwardVal Loop.14.OP.FF_Rem Loop.14.OP.ManualMode Loop.14.OP.ManualOutVal Loop.14.OP.MeasuredPower Loop.14.OP.OutputHighLimit Loop.14.OP.OutputLowLimit Loop.14.OP.Rate Loop.14.OP.RateDisable Loop.14.OP.RemOPH Loop.14.OP.RemOPL Loop.14.OP.SafeOutVal Loop.14.OP.SensorBreakMode Loop.14.OP.TrackEnable Loop.14.OP.TrackOutVal Loop.14.PID.ActiveSet Loop.14.PID.Boundary1-2 Loop.14.PID.Boundary2-3 Loop.14.PID.CutbackHigh Loop.14.PID.CutbackHigh2 Loop.14.PID.CutbackHigh3 DEC 3177 3178 3183 3184 3182 3181 3176 3447 3441 3446 3444 3442 3445 3448 3360 3361 3363 3362 3365 3366 3357 3364 3359 3358 3443 3332 3338 3348 3329 3330 3333 3412 3410 3344 3413 3411 3421 3419 3423 3424 3425 3422 3426 3431 3418 3331 3420 3408 3409 3414 3415 3430 3429 3417 3416 3428 3427 3356 3354 3355 3346 3374 3384 231 HEX 0C69 0C6A 0C6F 0C70 0C6E 0C6D 0C68 0D77 0D71 0D76 0D74 0D72 0D75 0D78 0D20 0D21 0D23 0D22 0D25 0D26 0D1D 0D24 0D1F 0D1E 0D73 0D04 0D0A 0D14 0D01 0D02 0D05 0D54 0D52 0D10 0D55 0D53 0D5D 0D5B 0D5F 0D60 0D61 0D5E 0D62 0D67 0D5A 0D03 0D5C 0D50 0D51 0D56 0D57 0D66 0D65 0D59 0D58 0D64 0D63 0D1C 0D1A 0D1B 0D12 0D2E 0D38 Engineering Handbook Parameter Description / Modbus address Loop.14.PID.CutbackLow Loop.14.PID.CutbackLow2 Loop.14.PID.CutbackLow3 Loop.14.PID.DerivativeTime Loop.14.PID.DerivativeTime2 Loop.14.PID.DerivativeTime3 Loop.14.PID.IntegralTime Loop.14.PID.IntegralTime2 Loop.14.PID.IntegralTime3 Loop.14.PID.LoopBreakTime Loop.14.PID.LoopBreakTime2 Loop.14.PID.LoopBreakTime3 Loop.14.PID.ManualReset Loop.14.PID.ManualReset2 Loop.14.PID.ManualReset3 Loop.14.PID.NumSets Loop.14.PID.OutputHi Loop.14.PID.OutputHi2 Loop.14.PID.OutputHi3 Loop.14.PID.OutputLo Loop.14.PID.OutputLo2 Loop.14.PID.OutputLo3 Loop.14.PID.ProportionalBand Loop.14.PID.ProportionalBand2 Loop.14.PID.ProportionalBand3 Loop.14.PID.RelCh2Gain Loop.14.PID.RelCh2Gain2 Loop.14.PID.RelCh2Gain3 Loop.14.PID.SchedulerRemoteInput Loop.14.PID.SchedulerType Loop.14.Setup.CH1ControlType Loop.14.Setup.CH2ControlType Loop.14.Setup.ControlAction Loop.14.Setup.DerivativeType Loop.14.Setup.LoopType Loop.14.Setup.PBUnits Loop.14.SP.AltSP Loop.14.SP.AltSPSelect Loop.14.SP.ManualTrack Loop.14.SP.RangeHigh Loop.14.SP.RangeLow Loop.14.SP.Rate Loop.14.SP.RateDisable Loop.14.SP.RateDone Loop.14.SP.SP1 Loop.14.SP.SP2 Loop.14.SP.SPHighLimit Loop.14.SP.SPLowLimit Loop.14.SP.SPSelect Loop.14.SP.SPTrack Loop.14.SP.SPTrim Loop.14.SP.SPTrimHighLimit Loop.14.SP.SPTrimLowLimit Loop.14.SP.TrackPV Loop.14.SP.TrackSP Loop.14.Tune.AutotuneEnable Loop.14.Tune.OutputHighLimit Loop.14.Tune.OutputLowLimit Loop.14.Tune.Stage Loop.14.Tune.StageTime Loop.14.Tune.State Loop.14.Tune.StepSize Loop.14.Tune.Type 232 Mini8 Controller DEC 3345 3375 3385 3337 3373 3383 3336 3372 3382 3368 3377 3387 3367 3376 3386 3392 3369 3379 3389 3370 3380 3390 3334 3371 3381 3347 3378 3388 3393 3391 3350 3351 3335 3353 3349 3352 3396 3397 3403 3340 3339 3398 3399 3407 3341 3342 3394 3395 3343 3404 3400 3401 3402 3405 3406 3436 3433 3434 3439 3440 3438 3437 3432 HEX 0D11 0D2F 0D39 0D09 0D2D 0D37 0D08 0D2C 0D36 0D28 0D31 0D3B 0D27 0D30 0D3A 0D40 0D29 0D33 0D3D 0D2A 0D34 0D3E 0D06 0D2B 0D35 0D13 0D32 0D3C 0D41 0D3F 0D16 0D17 0D07 0D19 0D15 0D18 0D44 0D45 0D4B 0D0C 0D0B 0D46 0D47 0D4F 0D0D 0D0E 0D42 0D43 0D0F 0D4C 0D48 0D49 0D4A 0D4D 0D4E 0D6C 0D69 0D6A 0D6F 0D70 0D6E 0D6D 0D68 Parameter Description / Modbus address Loop.15.Diag.DerivativeOutContrib Loop.15.Diag.Error Loop.15.Diag.IntegralOutContrib Loop.15.Diag.LoopBreakAlarm Loop.15.Diag.LoopMode Loop.15.Diag.PropOutContrib Loop.15.Diag.SBrk Loop.15.Diag.SchedCBH Loop.15.Diag.SchedCBL Loop.15.Diag.SchedLPBrk Loop.15.Diag.SchedMR Loop.15.Diag.SchedOPHi Loop.15.Diag.SchedOPLo Loop.15.Diag.SchedPB Loop.15.Diag.SchedR2G Loop.15.Diag.SchedTd Loop.15.Diag.SchedTi Loop.15.Diag.TargetOutVal Loop.15.Main.ActiveOut Loop.15.Main.AutoMan Loop.15.Main.Inhibit Loop.15.Main.PV Loop.15.Main.TargetSP Loop.15.Main.WorkingSP Loop.15.OP.Ch1OnOffHysteresis Loop.15.OP.Ch1Out Loop.15.OP.Ch2Deadband Loop.15.OP.Ch2OnOffHysteresis Loop.15.OP.Ch2Out Loop.15.OP.CoolType Loop.15.OP.EnablePowerFeedforward Loop.15.OP.FeedForwardGain Loop.15.OP.FeedForwardOffset Loop.15.OP.FeedForwardTrimLimit Loop.15.OP.FeedForwardType Loop.15.OP.FeedForwardVal Loop.15.OP.FF_Rem Loop.15.OP.ManualMode Loop.15.OP.ManualOutVal Loop.15.OP.MeasuredPower Loop.15.OP.OutputHighLimit Loop.15.OP.OutputLowLimit Loop.15.OP.Rate Loop.15.OP.RateDisable Loop.15.OP.RemOPH Loop.15.OP.RemOPL Loop.15.OP.SafeOutVal Loop.15.OP.SensorBreakMode Loop.15.OP.TrackEnable Loop.15.OP.TrackOutVal Loop.15.PID.ActiveSet Loop.15.PID.Boundary1-2 Loop.15.PID.Boundary2-3 Loop.15.PID.CutbackHigh Loop.15.PID.CutbackHigh2 Loop.15.PID.CutbackHigh3 Loop.15.PID.CutbackLow Loop.15.PID.CutbackLow2 Loop.15.PID.CutbackLow3 Loop.15.PID.DerivativeTime Loop.15.PID.DerivativeTime2 Loop.15.PID.DerivativeTime3 Loop.15.PID.IntegralTime Part No HA028581 Issue 3 DEC 3703 3697 3702 3700 3698 3701 3704 3616 3617 3619 3618 3621 3622 3613 3620 3615 3614 3699 3588 3594 3604 3585 3586 3589 3668 3666 3600 3669 3667 3677 3675 3679 3680 3681 3678 3682 3687 3674 3587 3676 3664 3665 3670 3671 3686 3685 3673 3672 3684 3683 3612 3610 3611 3602 3630 3640 3601 3631 3641 3593 3629 3639 3592 Sep-05 HEX 0E77 0E71 0E76 0E74 0E72 0E75 0E78 0E20 0E21 0E23 0E22 0E25 0E26 0E1D 0E24 0E1F 0E1E 0E73 0E04 0E0A 0E14 0E01 0E02 0E05 0E54 0E52 0E10 0E55 0E53 0E5D 0E5B 0E5F 0E60 0E61 0E5E 0E62 0E67 0E5A 0E03 0E5C 0E50 0E51 0E56 0E57 0E66 0E65 0E59 0E58 0E64 0E63 0E1C 0E1A 0E1B 0E12 0E2E 0E38 0E11 0E2F 0E39 0E09 0E2D 0E37 0E08 Mini8 Controller Engineering Handbook Parameter Description / Modbus address Loop.15.PID.IntegralTime2 Loop.15.PID.IntegralTime3 Loop.15.PID.LoopBreakTime Loop.15.PID.LoopBreakTime2 Loop.15.PID.LoopBreakTime3 Loop.15.PID.ManualReset Loop.15.PID.ManualReset2 Loop.15.PID.ManualReset3 Loop.15.PID.NumSets Loop.15.PID.OutputHi Loop.15.PID.OutputHi2 Loop.15.PID.OutputHi3 Loop.15.PID.OutputLo Loop.15.PID.OutputLo2 Loop.15.PID.OutputLo3 Loop.15.PID.ProportionalBand Loop.15.PID.ProportionalBand2 Loop.15.PID.ProportionalBand3 Loop.15.PID.RelCh2Gain Loop.15.PID.RelCh2Gain2 Loop.15.PID.RelCh2Gain3 Loop.15.PID.SchedulerRemoteInput Loop.15.PID.SchedulerType Loop.15.Setup.CH1ControlType Loop.15.Setup.CH2ControlType Loop.15.Setup.ControlAction Loop.15.Setup.DerivativeType Loop.15.Setup.LoopType Loop.15.Setup.PBUnits Loop.15.SP.AltSP Loop.15.SP.AltSPSelect Loop.15.SP.ManualTrack Loop.15.SP.RangeHigh Loop.15.SP.RangeLow Loop.15.SP.Rate Loop.15.SP.RateDisable Loop.15.SP.RateDone Loop.15.SP.SP1 Loop.15.SP.SP2 Loop.15.SP.SPHighLimit Loop.15.SP.SPLowLimit Loop.15.SP.SPSelect Loop.15.SP.SPTrack Loop.15.SP.SPTrim Loop.15.SP.SPTrimHighLimit Loop.15.SP.SPTrimLowLimit Loop.15.SP.TrackPV Loop.15.SP.TrackSP Loop.15.Tune.AutotuneEnable Loop.15.Tune.OutputHighLimit Loop.15.Tune.OutputLowLimit Loop.15.Tune.Stage Loop.15.Tune.StageTime Loop.15.Tune.State Loop.15.Tune.StepSize Loop.15.Tune.Type Loop.16.Diag.DerivativeOutContrib Loop.16.Diag.Error Loop.16.Diag.IntegralOutContrib Loop.16.Diag.LoopBreakAlarm Loop.16.Diag.LoopMode Loop.16.Diag.PropOutContrib Loop.16.Diag.SBrk Part No HA028581 Issue 3 Sep-05 DEC 3628 3638 3624 3633 3643 3623 3632 3642 3648 3625 3635 3645 3626 3636 3646 3590 3627 3637 3603 3634 3644 3649 3647 3606 3607 3591 3609 3605 3608 3652 3653 3659 3596 3595 3654 3655 3663 3597 3598 3650 3651 3599 3660 3656 3657 3658 3661 3662 3692 3689 3690 3695 3696 3694 3693 3688 3959 3953 3958 3956 3954 3957 3960 HEX 0E2C 0E36 0E28 0E31 0E3B 0E27 0E30 0E3A 0E40 0E29 0E33 0E3D 0E2A 0E34 0E3E 0E06 0E2B 0E35 0E13 0E32 0E3C 0E41 0E3F 0E16 0E17 0E07 0E19 0E15 0E18 0E44 0E45 0E4B 0E0C 0E0B 0E46 0E47 0E4F 0E0D 0E0E 0E42 0E43 0E0F 0E4C 0E48 0E49 0E4A 0E4D 0E4E 0E6C 0E69 0E6A 0E6F 0E70 0E6E 0E6D 0E68 0F77 0F71 0F76 0F74 0F72 0F75 0F78 Parameter Description / Modbus address Loop.16.Diag.SchedCBH Loop.16.Diag.SchedCBL Loop.16.Diag.SchedLPBrk Loop.16.Diag.SchedMR Loop.16.Diag.SchedOPHi Loop.16.Diag.SchedOPLo Loop.16.Diag.SchedPB Loop.16.Diag.SchedR2G Loop.16.Diag.SchedTd Loop.16.Diag.SchedTi Loop.16.Diag.TargetOutVal Loop.16.Main.ActiveOut Loop.16.Main.AutoMan Loop.16.Main.Inhibit Loop.16.Main.PV Loop.16.Main.TargetSP Loop.16.Main.WorkingSP Loop.16.OP.Ch1OnOffHysteresis Loop.16.OP.Ch1Out Loop.16.OP.Ch2Deadband Loop.16.OP.Ch2OnOffHysteresis Loop.16.OP.Ch2Out Loop.16.OP.CoolType Loop.16.OP.EnablePowerFeedforward Loop.16.OP.FeedForwardGain Loop.16.OP.FeedForwardOffset Loop.16.OP.FeedForwardTrimLimit Loop.16.OP.FeedForwardType Loop.16.OP.FeedForwardVal Loop.16.OP.FF_Rem Loop.16.OP.ManualMode Loop.16.OP.ManualOutVal Loop.16.OP.MeasuredPower Loop.16.OP.OutputHighLimit Loop.16.OP.OutputLowLimit Loop.16.OP.Rate Loop.16.OP.RateDisable Loop.16.OP.RemOPH Loop.16.OP.RemOPL Loop.16.OP.SafeOutVal Loop.16.OP.SensorBreakMode Loop.16.OP.TrackEnable Loop.16.OP.TrackOutVal Loop.16.PID.ActiveSet Loop.16.PID.Boundary1-2 Loop.16.PID.Boundary2-3 Loop.16.PID.CutbackHigh Loop.16.PID.CutbackHigh2 Loop.16.PID.CutbackHigh3 Loop.16.PID.CutbackLow Loop.16.PID.CutbackLow2 Loop.16.PID.CutbackLow3 Loop.16.PID.DerivativeTime Loop.16.PID.DerivativeTime2 Loop.16.PID.DerivativeTime3 Loop.16.PID.IntegralTime Loop.16.PID.IntegralTime2 Loop.16.PID.IntegralTime3 Loop.16.PID.LoopBreakTime Loop.16.PID.LoopBreakTime2 Loop.16.PID.LoopBreakTime3 Loop.16.PID.ManualReset Loop.16.PID.ManualReset2 DEC 3872 3873 3875 3874 3877 3878 3869 3876 3871 3870 3955 3844 3850 3860 3841 3842 3845 3924 3922 3856 3925 3923 3933 3931 3935 3936 3937 3934 3938 3943 3930 3843 3932 3920 3921 3926 3927 3942 3941 3929 3928 3940 3939 3868 3866 3867 3858 3886 3896 3857 3887 3897 3849 3885 3895 3848 3884 3894 3880 3889 3899 3879 3888 233 HEX 0F20 0F21 0F23 0F22 0F25 0F26 0F1D 0F24 0F1F 0F1E 0F73 0F04 0F0A 0F14 0F01 0F02 0F05 0F54 0F52 0F10 0F55 0F53 0F5D 0F5B 0F5F 0F60 0F61 0F5E 0F62 0F67 0F5A 0F03 0F5C 0F50 0F51 0F56 0F57 0F66 0F65 0F59 0F58 0F64 0F63 0F1C 0F1A 0F1B 0F12 0F2E 0F38 0F11 0F2F 0F39 0F09 0F2D 0F37 0F08 0F2C 0F36 0F28 0F31 0F3B 0F27 0F30 Engineering Handbook Parameter Description / Modbus address Loop.16.PID.ManualReset3 Loop.16.PID.NumSets Loop.16.PID.OutputHi Loop.16.PID.OutputHi2 Loop.16.PID.OutputHi3 Loop.16.PID.OutputLo Loop.16.PID.OutputLo2 Loop.16.PID.OutputLo3 Loop.16.PID.ProportionalBand Loop.16.PID.ProportionalBand2 Loop.16.PID.ProportionalBand3 Loop.16.PID.RelCh2Gain Loop.16.PID.RelCh2Gain2 Loop.16.PID.RelCh2Gain3 Loop.16.PID.SchedulerRemoteInput Loop.16.PID.SchedulerType Loop.16.Setup.CH1ControlType Loop.16.Setup.CH2ControlType Loop.16.Setup.ControlAction Loop.16.Setup.DerivativeType Loop.16.Setup.LoopType Loop.16.Setup.PBUnits Loop.16.SP.AltSP Loop.16.SP.AltSPSelect Loop.16.SP.ManualTrack Loop.16.SP.RangeHigh Loop.16.SP.RangeLow Loop.16.SP.Rate Loop.16.SP.RateDisable Loop.16.SP.RateDone Loop.16.SP.SP1 Loop.16.SP.SP2 Loop.16.SP.SPHighLimit Loop.16.SP.SPLowLimit Loop.16.SP.SPSelect Loop.16.SP.SPTrack Loop.16.SP.SPTrim Loop.16.SP.SPTrimHighLimit Loop.16.SP.SPTrimLowLimit Loop.16.SP.TrackPV Loop.16.SP.TrackSP Loop.16.Tune.AutotuneEnable Loop.16.Tune.OutputHighLimit Loop.16.Tune.OutputLowLimit Loop.16.Tune.Stage Loop.16.Tune.StageTime Loop.16.Tune.State Loop.16.Tune.StepSize Loop.16.Tune.Type Math2.1.In1 Math2.1.In2 Math2.1.Out Math2.2.In1 Math2.2.In2 Math2.2.Out Math2.3.In1 Math2.3.In2 Math2.3.Out Math2.4.In1 Math2.4.In2 Math2.4.Out Math2.5.In1 Math2.5.In2 234 Mini8 Controller DEC 3898 3904 3881 3891 3901 3882 3892 3902 3846 3883 3893 3859 3890 3900 3905 3903 3862 3863 3847 3865 3861 3864 3908 3909 3915 3852 3851 3910 3911 3919 3853 3854 3906 3907 3855 3916 3912 3913 3914 3917 3918 3948 3945 3946 3951 3952 3950 3949 3944 4750 4751 4752 4753 4754 4755 4756 4757 4758 4759 4760 4761 4762 4763 HEX 0F3A 0F40 0F29 0F33 0F3D 0F2A 0F34 0F3E 0F06 0F2B 0F35 0F13 0F32 0F3C 0F41 0F3F 0F16 0F17 0F07 0F19 0F15 0F18 0F44 0F45 0F4B 0F0C 0F0B 0F46 0F47 0F4F 0F0D 0F0E 0F42 0F43 0F0F 0F4C 0F48 0F49 0F4A 0F4D 0F4E 0F6C 0F69 0F6A 0F6F 0F70 0F6E 0F6D 0F68 128E 128F 1290 1291 1292 1293 1294 1295 1296 1297 1298 1299 129A 129B Parameter Description / Modbus address Math2.5.Out Math2.6.In1 Math2.6.In2 Math2.6.Out Math2.7.In1 Math2.7.In2 Math2.7.Out Math2.8.In1 Math2.8.In2 Math2.8.Out Math2.9.In1 Math2.9.In2 Math2.9.Out Math2.10.In1 Math2.10.In2 Math2.10.Out Math2.11.In1 Math2.11.In2 Math2.11.Out Math2.12.In1 Math2.12.In2 Math2.12.Out Math2.13.In1 Math2.13.In2 Math2.13.Out Math2.14.In1 Math2.14.In2 Math2.14.Out Math2.15.In1 Math2.15.In2 Math2.15.Out Math2.16.In1 Math2.16.In2 Math2.16.Out Math2.17.In1 Math2.17.In2 Math2.17.Out Math2.18.In1 Math2.18.In2 Math2.18.Out Math2.19.In1 Math2.19.In2 Math2.19.Out Math2.20.In1 Math2.20.In2 Math2.20.Out Math2.21.In1 Math2.21.In2 Math2.21.Out Math2.22.In1 Math2.22.In2 Math2.22.Out Math2.23.In1 Math2.23.In2 Math2.23.Out Math2.24.In1 Math2.24.In2 Math2.24.Out MultiOper.1.AverageOut MultiOper.1.In1 MultiOper.1.In2 MultiOper.1.In3 MultiOper.1.In4 Part No HA028581 Issue 3 DEC HEX 4764 129C 4765 129D 4766 129E 4767 129F 4768 12A0 4769 12A1 4770 12A2 4771 12A3 4772 12A4 4773 12A5 4774 12A6 4775 12A7 4776 12A8 4777 12A9 4778 12AA 4779 12AB 4780 12AC 4781 12AD 4782 12AE 4783 12AF 4784 12B0 4785 12B1 4786 12B2 4787 12B3 4788 12B4 4789 12B5 4790 12B6 4791 12B7 4792 12B8 4793 12B9 4794 12BA 4795 12BB 4796 12BC 4797 12BD 4798 12BE 4799 12BF 4800 12C0 4801 12C1 4802 12C2 4803 12C3 4804 12C4 4805 12C5 4806 12C6 4807 12C7 4808 12C8 4809 12C9 4810 12CA 4811 12CB 4812 12CC 4813 12CD 4814 12CE 4815 12CF 4816 12D0 4817 12D1 4818 12D2 4819 12D3 4820 12D4 4821 12D5 5017 1399 5006 138e 5007 138f 5008 1390 5009 1391 Sep-05 Mini8 Controller Engineering Handbook Parameter Description / Modbus address MultiOper.1.In5 MultiOper.1.In6 MultiOper.1.In7 MultiOper.1.In8 MultiOper.1.MaxOut MultiOper.1.MinOut MultiOper.1.SumOut MultiOper.2.AverageOut MultiOper.2.In1 MultiOper.2.In2 MultiOper.2.In3 MultiOper.2.In4 MultiOper.2.In5 MultiOper.2.In6 MultiOper.2.In7 MultiOper.2.In8 MultiOper.2.MaxOut MultiOper.2.MinOut MultiOper.2.SumOut MultiOper.3.AverageOut MultiOper.3.In1 MultiOper.3.In2 MultiOper.3.In3 MultiOper.3.In4 MultiOper.3.In5 MultiOper.3.In6 MultiOper.3.In7 MultiOper.3.In8 MultiOper.3.MaxOut MultiOper.3.MinOut MultiOper.3.SumOut MultiOper.4.AverageOut MultiOper.4.In1 MultiOper.4.In2 MultiOper.4.In3 MultiOper.4.In4 MultiOper.4.In5 MultiOper.4.In6 MultiOper.4.In7 MultiOper.4.In8 MultiOper.4.MaxOut MultiOper.4.MinOut MultiOper.4.SumOut Recipe.LastDataset Recipe.LoadingStatus Recipe.RecipeSelect SwitchOver.SelectIn SwitchOver.SwitchHigh SwitchOver.SwitchLow Timer.1.ElapsedTime Timer.1.Out Timer.1.Time Timer.2.ElapsedTime Timer.2.Out Timer.2.Time Timer.3.ElapsedTime Timer.3.Out Timer.3.Time Timer.4.ElapsedTime Timer.4.Out Timer.4.Time UsrVal.1.Val UsrVal.2.Val Part No HA028581 Issue 3 Sep-05 DEC 5010 5011 5012 5013 5015 5016 5014 5029 5018 5019 5020 5021 5022 5023 5024 5025 5027 5028 5026 5041 5030 5031 5032 5033 5034 5035 5036 5037 5039 5040 5038 5053 5042 5043 5044 5045 5046 5047 5048 5049 5051 5052 5050 4913 4914 4912 4927 4925 4926 4995 4996 4994 4998 4999 4997 5001 5002 5000 5004 5005 5003 4962 4963 HEX 1392 1393 1394 1395 1397 1398 1396 13a5 139a 139b 139c 139d 139e 139f 13a0 13a1 13a3 13a4 13a2 13b1 13a6 13a7 13a8 13a9 13aa 13ab 13ac 13ad 13af 13b0 13ae 13bd 13b2 13b3 13b4 13b5 13b6 13b7 13b8 13b9 13bb 13bc 13ba 1331 1332 1330 133f 133d 133e 1383 1384 1382 1386 1387 1385 1389 138A 1388 138C 138D 138B 1362 1363 Parameter Description / Modbus address UsrVal.3.Val UsrVal.4.Val UsrVal.5.Val UsrVal.6.Val UsrVal.7.Val UsrVal.8.Val UsrVal.9.Val UsrVal.10.Val UsrVal.11.Val UsrVal.12.Val UsrVal.13.Val UsrVal.14.Val UsrVal.15.Val UsrVal.16.Val UsrVal.17.Val UsrVal.18.Val UsrVal.19.Val UsrVal.20.Val UsrVal.21.Val UsrVal.22.Val UsrVal.23.Val UsrVal.24.Val UsrVal.25.Val UsrVal.26.Val UsrVal.27.Val UsrVal.28.Val UsrVal.29.Val UsrVal.30.Val UsrVal.31.Val UsrVal.32.Val Zirconia.1.CarbonPot Zirconia.1.CleanFreq Zirconia.1.CleanProbe Zirconia.1.CleanState Zirconia.1.CleanTime Zirconia.1.CleanValve Zirconia.1.DewPoint Zirconia.1.GasRef Zirconia.1.MaxRcovTime Zirconia.1.MinCalTemp Zirconia.1.MinRcovTime Zirconia.1.Oxygen Zirconia.1.OxygenExp Zirconia.1.ProbeFault Zirconia.1.ProbeInput Zirconia.1.ProbeOffset Zirconia.1.ProbeStatus Zirconia.1.ProbeType Zirconia.1.ProcFactor Zirconia.1.PVFrozen Zirconia.1.RemGasEn Zirconia.1.RemGasRef Zirconia.1.Resolution Zirconia.1.SootAlm Zirconia.1.TempInput Zirconia.1.TempOffset Zirconia.1.Time2Clean Zirconia.1.Tolerence Zirconia.1.WrkGas Zirconia.2.CarbonPot Zirconia.2.CleanFreq Zirconia.2.CleanProbe Zirconia.2.CleanState DEC 4964 4965 4966 4967 4968 4969 4970 4971 4972 4973 4974 4975 4976 4977 4978 4979 4980 4981 4982 4983 4984 4985 4986 4987 4988 4989 4990 4991 4992 4993 13256 13251 13248 13268 13252 13263 13274 13254 13253 13270 13255 13261 13260 13271 13259 13250 13262 13258 13275 13272 13257 13267 13273 13264 13269 13266 13249 13276 13265 13288 13283 13280 13300 235 HEX 1364 1365 1366 1367 1368 1369 136A 136B 136C 136D 136E 136F 1370 1371 1372 1373 1374 1375 1376 1377 1378 1379 137A 137B 137C 137D 137E 137F 1380 1381 33C8 33C3 33CO 33D4 33C4 33CF 33DA 33C6 33C5 33D6 33C7 33CD 33CC 33D7 33CB 33C2 33CE 33CA 33DB 33D8 33C9 33D3 33D9 33D0 33D5 33D2 33C1 33DC 33D1 33E8 33E3 33EO 33F4 Engineering Handbook Parameter Description / Modbus address Zirconia.2.CleanTime Zirconia.2.CleanValve Zirconia.2.DewPoint Zirconia.2.GasRef Zirconia.2.MaxRcovTime Zirconia.2.MinCalTemp Zirconia.2.MinRcovTime Zirconia.2.Oxygen Zirconia.2.OxygenExp Zirconia.2.ProbeFault Zirconia.2.ProbeInput Zirconia.2.ProbeOffset Zirconia.2.ProbeStatus Zirconia.2.ProbeType Zirconia.2.ProcFactor Zirconia.2.PVFrozen Zirconia.2.RemGasEn Zirconia.2.RemGasRef Zirconia.2.Resolution Zirconia.2.SootAlm Zirconia.2.TempInput Zirconia.2.TempOffset Zirconia.2.Time2Clean Zirconia.2.Tolerence Zirconia.2.WrkGas 236 Mini8 Controller DEC 13284 13295 13306 13286 13285 13302 13287 13293 13292 13303 13291 13282 13294 13290 13307 13304 13289 13299 13305 13296 13301 13298 13281 13308 13297 HEX 33E4 33EF 33FA 33E6 33E5 33F6 33E7 33ED 33EC 33F7 33EB 33E2 33EE 33EA 33FB 33F8 33E9 33F3 33F9 33F0 33F5 33F2 33E1 33FC 33F1 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 23.2.1 Version 2.xx Programmer Addresses - Decimal PROGRAM NUMBER DECIMAL ADDRESSES (2.xx) Comms.n.ProgramNumber Program.n.HoldbackVal Program.n.RampUnits Program.n.DwellUnits Program.n.Cycles Programmer.n.PowerFailAct Programmer.n.Servo Programmer.n.SyncMode Programmer.n.ResetEventOuts Programmer.n.CurProg Programmer.n.CurSeg Programmer.n.ProgStatus Programmer.n.PSP Programmer.n.CyclesLeft Programmer.n.CurSegType Programmer.n.SegTarget Programmer.n.SegRate Programmer.n.ProgTimeLeft Programmer.n.PVIn Programmer.n.SPIn Programmer.n.EventOuts Programmer.n.SegTimeLeft Programmer.n.EndOfSeg Programmer.n.SyncIn Programmer.n.FastRun Programmer.n.AdvSeg Programmer.n.SkipSeg Program.n.PVStart Programmer.n.PrgIn1 Programmer.n.PrgIn2 Programmer.n.PVWaitIP Programmer.n.ProgError Programmer.n.PVEventOP Programmer.n.GoBackCyclesLeft Programmer.n.DelayTime Programmer.n.ProgReset Programmer.n.ProgRun Programmer.n.ProgHold Programmer.n.ProgRunHold Programmer.n.ProgRunReset Segment.1.Type Segment.1.Holdback Segment.1.Duration Segment.1.RampRate Segment.1.TargetSP Segment.1.EndAction Segment.1.EventOutputs Segment.1.WaitFor Segment.1.PVEvent Segment.1.PVThreshold Segment.1.UserVal Segment.1.GsoakType Segment.1.GsoakVal Part No HA028581 Issue 3 Sep-05 1 2 3 4 5 6 7 8 5568 5569 5570 5571 5572 5573 5574 5575 5576 5577 5578 5579 5580 5581 5582 5583 5584 5585 5586 5587 5588 5589 5590 5591 5592 5593 5594 5597 5602 5603 5604 5605 5606 5645 5685 5726 5768 5811 5855 5900 6080 6081 6084 6085 6086 6087 6088 6089 6090 6093 6094 6095 6096 6097 5632 5633 5634 5635 5636 5637 5638 5639 5640 5641 5642 5643 5644 5645 5646 5647 5648 5649 5650 5651 5652 5653 5654 5655 5656 5657 5658 5661 5666 5667 5668 5669 5670 5709 5749 5790 5832 5875 5919 5964 6592 6593 6596 6597 6598 6599 6600 6601 6602 6605 6606 6607 6608 6609 5696 5697 5698 5699 5700 5701 5702 5703 5704 5705 5706 5707 5708 5709 5710 5711 5712 5713 5714 5715 5716 5717 5718 5719 5720 5721 5722 5725 5730 5731 5732 5733 5734 5773 5813 5854 5896 5939 5983 6028 7104 7105 7108 7109 7110 7111 7112 7113 7114 7117 7118 7119 7120 7121 5760 5761 5762 5763 5764 5765 5766 5767 5768 5769 5770 5771 5772 5773 5774 5775 5776 5777 5778 5779 5780 5781 5782 5783 5784 5785 5786 5789 5794 5795 5796 5797 5798 5837 5877 5918 5960 6003 6047 6092 7616 7617 7620 7621 7622 7623 7624 7625 7626 7629 7630 7631 7632 7633 5824 5825 5826 5827 5828 5829 5830 5831 5832 5833 5834 5835 5836 5837 5838 5839 5840 5841 5842 5843 5844 5845 5846 5847 5848 5849 5850 5853 5858 5859 5860 5861 5862 5901 5941 5982 6024 6067 6111 6156 8128 8129 8132 8133 8134 8135 8136 8137 8138 8141 8142 8143 8144 8145 5888 5889 5890 5891 5892 5893 5894 5895 5896 5897 5898 5899 5900 5901 5902 5903 5904 5905 5906 5907 5908 5909 5910 5911 5912 5913 5914 5917 5922 5923 5924 5925 5926 5965 6005 6046 6088 6131 6175 6220 8640 8641 8644 8645 8646 8647 8648 8649 8650 8653 8654 8655 8656 8657 5952 5953 5954 5955 5956 5957 5958 5959 5960 5961 5962 5963 5964 5965 5966 5967 5968 5969 5970 5971 5972 5973 5974 5975 5976 5977 5978 5981 5986 5987 5988 5989 5990 6029 6069 6110 6152 6195 6239 6284 9152 9153 9156 9157 9158 9159 9160 9161 9162 9165 9166 9167 9168 9169 6016 6017 6018 6019 6020 6021 6022 6023 6024 6025 6026 6027 6028 6029 6030 6031 6032 6033 6034 6035 6036 6037 6038 6039 6040 6041 6042 6045 6050 6051 6052 6053 6054 6093 6133 6174 6216 6259 6303 6348 9664 9665 9668 9669 9670 9671 9672 9673 9674 9677 9678 9679 9680 9681 237 Engineering Handbook PROGRAM NUMBER DECIMAL ADDRESSES (2.xx) Segment.1.TimeEvent Segment.1.OnTime Segment.1.OffTime Segment.1.PIDSet Segment.1.PVWait Segment.1.WaitVal Segment.2.Type Segment.2.Holdback Segment.2.Duration Segment.2.RampRate Segment.2.TargetSP Segment.2.EndAction Segment.2.EventOutputs Segment.2.WaitFor Segment.2.GobackSeg Segment.2.GobackCycles Segment.2.PVEvent Segment.2.PVThreshold Segment.2.UserVal Segment.2.GsoakType Segment.2.GsoakVal Segment.2.TimeEvent Segment.2.OnTime Segment.2.OffTime Segment.2.PIDSet Segment.2.PVWait Segment.2.WaitVal Segment.3.Type Segment.3.Holdback Segment.3.Duration Segment.3.RampRate Segment.3.TargetSP Segment.3.EndAction Segment.3.EventOutputs Segment.3.WaitFor Segment.3.GobackSeg Segment.3.GobackCycles Segment.3.PVEvent Segment.3.PVThreshold Segment.3.UserVal Segment.3.GsoakType Segment.3.GsoakVal Segment.3.TimeEvent Segment.3.OnTime Segment.3.OffTime Segment.3.PIDSet Segment.3.PVWait Segment.3.WaitVal Segment.4.Type Segment.4.Holdback Segment.4.Duration Segment.4.RampRate Segment.4.TargetSP Segment.4.EndAction Segment.4.EventOutputs Segment.4.WaitFor 238 Mini8 Controller 1 2 3 4 5 6 7 8 6098 6099 6100 6101 6102 6103 6112 6113 6116 6117 6118 6119 6120 6121 6122 6123 6124 6125 6126 6127 6128 6129 6130 6131 6132 6133 6134 6135 6144 6145 6148 6149 6150 6151 6152 6153 6154 6155 6156 6157 6158 6159 6160 6161 6162 6163 6164 6165 6166 6167 6176 6177 6180 6181 6182 6183 6184 6185 6610 6611 6612 6613 6614 6615 6624 6625 6628 6629 6630 6631 6632 6633 6634 6635 6636 6637 6638 6639 6640 6641 6642 6643 6644 6645 6646 6647 6656 6657 6660 6661 6662 6663 6664 6665 6666 6667 6668 6669 6670 6671 6672 6673 6674 6675 6676 6677 6678 6679 6688 6689 6692 6693 6694 6695 6696 6697 7122 7123 7124 7125 7126 7127 7136 7137 7140 7141 7142 7143 7144 7145 7146 7147 7148 7149 7150 7151 7152 7153 7154 7155 7156 7157 7158 7159 7168 7169 7172 7173 7174 7175 7176 7177 7178 7179 7180 7181 7182 7183 7184 7185 7186 7187 7188 7189 7190 7191 7200 7201 7204 7205 7206 7207 7208 7209 7634 7635 7636 7637 7638 7639 7648 7649 7652 7653 7654 7655 7656 7657 7658 7659 7660 7661 7662 7663 7664 7665 7666 7667 7668 7669 7670 7671 7680 7681 7684 7685 7686 7687 7688 7689 7690 7691 7692 7693 7694 7695 7696 7697 7698 7699 7700 7701 7702 7703 7712 7713 7716 7717 7718 7719 7720 7721 8146 8147 8148 8149 8150 8151 8160 8161 8164 8165 8166 8167 8168 8169 8170 8171 8172 8173 8174 8175 8176 8177 8178 8179 8180 8181 8182 8183 8192 8193 8196 8197 8198 8199 8200 8201 8202 8203 8204 8205 8206 8207 8208 8209 8210 8211 8212 8213 8214 8215 8224 8225 8228 8229 8230 8231 8232 8233 8658 8659 8660 8661 8662 8663 8672 8673 8676 8677 8678 8679 8680 8681 8682 8683 8684 8685 8686 8687 8688 8689 8690 8691 8692 8693 8694 8695 8704 8705 8708 8709 8710 8711 8712 8713 8714 8715 8716 8717 8718 8719 8720 8721 8722 8723 8724 8725 8726 8727 8736 8737 8740 8741 8742 8743 8744 8745 9170 9171 9172 9173 9174 9175 9184 9185 9188 9189 9190 9191 9192 9193 9194 9195 9196 9197 9198 9199 9200 9201 9202 9203 9204 9205 9206 9207 9216 9217 9220 9221 9222 9223 9224 9225 9226 9227 9228 9229 9230 9231 9232 9233 9234 9235 9236 9237 9238 9239 9248 9249 9252 9253 9254 9255 9256 9257 9682 9683 9684 9685 9686 9687 9696 9697 9700 9701 9702 9703 9704 9705 9706 9707 9708 9709 9710 9711 9712 9713 9714 9715 9716 9717 9718 9719 9728 9729 9732 9733 9734 9735 9736 9737 9738 9739 9740 9741 9742 9743 9744 9745 9746 9747 9748 9749 9750 9751 9760 9761 9764 9765 9766 9767 9768 9769 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook PROGRAM NUMBER DECIMAL ADDRESSES (2.xx) Segment.4.GobackSeg Segment.4.GobackCycles Segment.4.PVEvent Segment.4.PVThreshold Segment.4.UserVal Segment.4.GsoakType Segment.4.GsoakVal Segment.4.TimeEvent Segment.4.OnTime Segment.4.OffTime Segment.4.PIDSet Segment.4.PVWait Segment.4.WaitVal Segment.5.Type Segment.5.Holdback Segment.5.Duration Segment.5.RampRate Segment.5.TargetSP Segment.5.EndAction Segment.5.EventOutputs Segment.5.WaitFor Segment.5.GobackSeg Segment.5.GobackCycles Segment.5.PVEvent Segment.5.PVThreshold Segment.5.UserVal Segment.5.GsoakType Segment.5.GsoakVal Segment.5.TimeEvent Segment.5.OnTime Segment.5.OffTime Segment.5.PIDSet Segment.5.PVWait Segment.5.WaitVal Segment.6.Type Segment.6.Holdback Segment.6.Duration Segment.6.RampRate Segment.6.TargetSP Segment.6.EndAction Segment.6.EventOutputs Segment.6.WaitFor Segment.6.GobackSeg Segment.6.GobackCycles Segment.6.PVEvent Segment.6.PVThreshold Segment.6.UserVal Segment.6.GsoakType Segment.6.GsoakVal Segment.6.TimeEvent Segment.6.OnTime Segment.6.OffTime Segment.6.PIDSet Segment.6.PVWait Segment.6.WaitVal Part No HA028581 Issue 3 Sep-05 1 2 3 4 5 6 7 8 6186 6187 6188 6189 6190 6191 6192 6193 6194 6195 6196 6197 6198 6199 6208 6209 6212 6213 6214 6215 6216 6217 6218 6219 6220 6221 6222 6223 6224 6225 6226 6227 6228 6229 6230 6231 6240 6241 6244 6245 6246 6247 6248 6249 6250 6251 6252 6253 6254 6255 6256 6257 6258 6259 6260 6261 6262 6263 6698 6699 6700 6701 6702 6703 6704 6705 6706 6707 6708 6709 6710 6711 6720 6721 6724 6725 6726 6727 6728 6729 6730 6731 6732 6733 6734 6735 6736 6737 6738 6739 6740 6741 6742 6743 6752 6753 6756 6757 6758 6759 6760 6761 6762 6763 6764 6765 6766 6767 6768 6769 6770 6771 6772 6773 6774 6775 7210 7211 7212 7213 7214 7215 7216 7217 7218 7219 7220 7221 7222 7223 7232 7233 7236 7237 7238 7239 7240 7241 7242 7243 7244 7245 7246 7247 7248 7249 7250 7251 7252 7253 7254 7255 7264 7265 7268 7269 7270 7271 7272 7273 7274 7275 7276 7277 7278 7279 7280 7281 7282 7283 7284 7285 7286 7287 7722 7723 7724 7725 7726 7727 7728 7729 7730 7731 7732 7733 7734 7735 7744 7745 7748 7749 7750 7751 7752 7753 7754 7755 7756 7757 7758 7759 7760 7761 7762 7763 7764 7765 7766 7767 7776 7777 7780 7781 7782 7783 7784 7785 7786 7787 7788 7789 7790 7791 7792 7793 7794 7795 7796 7797 7798 7799 8234 8235 8236 8237 8238 8239 8240 8241 8242 8243 8244 8245 8246 8247 8256 8257 8260 8261 8262 8263 8264 8265 8266 8267 8268 8269 8270 8271 8272 8273 8274 8275 8276 8277 8278 8279 8288 8289 8292 8293 8294 8295 8296 8297 8298 8299 8300 8301 8302 8303 8304 8305 8306 8307 8308 8309 8310 8311 8746 8747 8748 8749 8750 8751 8752 8753 8754 8755 8756 8757 8758 8759 8768 8769 8772 8773 8774 8775 8776 8777 8778 8779 8780 8781 8782 8783 8784 8785 8786 8787 8788 8789 8790 8791 8800 8801 8804 8805 8806 8807 8808 8809 8810 8811 8812 8813 8814 8815 8816 8817 8818 8819 8820 8821 8822 8823 9258 9259 9260 9261 9262 9263 9264 9265 9266 9267 9268 9269 9270 9271 9280 9281 9284 9285 9286 9287 9288 9289 9290 9291 9292 9293 9294 9295 9296 9297 9298 9299 9300 9301 9302 9303 9312 9313 9316 9317 9318 9319 9320 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330 9331 9332 9333 9334 9335 9770 9771 9772 9773 9774 9775 9776 9777 9778 9779 9780 9781 9782 9783 9792 9793 9796 9797 9798 9799 9800 9801 9802 9803 9804 9805 9806 9807 9808 9809 9810 9811 9812 9813 9814 9815 9824 9825 9828 9829 9830 9831 9832 9833 9834 9835 9836 9837 9838 9839 9840 9841 9842 9843 9844 9845 9846 9847 239 Engineering Handbook PROGRAM NUMBER DECIMAL ADDRESSES (2.xx) Segment.7.Type Segment.7.Holdback Segment.7.Duration Segment.7.RampRate Segment.7.TargetSP Segment.7.EndAction Segment.7.EventOutputs Segment.7.WaitFor Segment.7.GobackSeg Segment.7.GobackCycles Segment.7.PVEvent Segment.7.PVThreshold Segment.7.UserVal Segment.7.GsoakType Segment.7.GsoakVal Segment.7.TimeEvent Segment.7.OnTime Segment.7.OffTime Segment.7.PIDSet Segment.7.PVWait Segment.7.WaitVal Segment.8.Type Segment.8.Holdback Segment.8.Duration Segment.8.RampRate Segment.8.TargetSP Segment.8.EndAction Segment.8.EventOutputs Segment.8.WaitFor Segment.8.GobackSeg Segment.8.GobackCycles Segment.8.PVEvent Segment.8.PVThreshold Segment.8.UserVal Segment.8.GsoakType Segment.8.GsoakVal Segment.8.TimeEvent Segment.8.OnTime Segment.8.OffTime Segment.8.PIDSet Segment.8.PVWait Segment.8.WaitVal Segment.9.Type Segment.9.Holdback Segment.9.Duration Segment.9.RampRate Segment.9.TargetSP Segment.9.EndAction Segment.9.EventOutputs Segment.9.WaitFor Segment.9.GobackSeg Segment.9.GobackCycles Segment.9.PVEvent Segment.9.PVThreshold Segment.9.UserVal 240 Mini8 Controller 1 2 3 4 5 6 7 8 6272 6273 6276 6277 6278 6279 6280 6281 6282 6283 6284 6285 6286 6287 6288 6289 6290 6291 6292 6293 6294 6295 6304 6305 6308 6309 6310 6311 6312 6313 6314 6315 6316 6317 6318 6319 6320 6321 6322 6323 6324 6325 6326 6327 6336 6337 6340 6341 6342 6343 6344 6345 6346 6347 6348 6349 6350 6351 6784 6785 6788 6789 6790 6791 6792 6793 6794 6795 6796 6797 6798 6799 6800 6801 6802 6803 6804 6805 6806 6807 6816 6817 6820 6821 6822 6823 6824 6825 6826 6827 6828 6829 6830 6831 6832 6833 6834 6835 6836 6837 6838 6839 6848 6849 6852 6853 6854 6855 6856 6857 6858 6859 6860 6861 6862 6863 7296 7297 7300 7301 7302 7303 7304 7305 7306 7307 7308 7309 7310 7311 7312 7313 7314 7315 7316 7317 7318 7319 7328 7329 7332 7333 7334 7335 7336 7337 7338 7339 7340 7341 7342 7343 7344 7345 7346 7347 7348 7349 7350 7351 7360 7361 7364 7365 7366 7367 7368 7369 7370 7371 7372 7373 7374 7375 7808 7809 7812 7813 7814 7815 7816 7817 7818 7819 7820 7821 7822 7823 7824 7825 7826 7827 7828 7829 7830 7831 7840 7841 7844 7845 7846 7847 7848 7849 7850 7851 7852 7853 7854 7855 7856 7857 7858 7859 7860 7861 7862 7863 7872 7873 7876 7877 7878 7879 7880 7881 7882 7883 7884 7885 7886 7887 8320 8321 8324 8325 8326 8327 8328 8329 8330 8331 8332 8333 8334 8335 8336 8337 8338 8339 8340 8341 8342 8343 8352 8353 8356 8357 8358 8359 8360 8361 8362 8363 8364 8365 8366 8367 8368 8369 8370 8371 8372 8373 8374 8375 8384 8385 8388 8389 8390 8391 8392 8393 8394 8395 8396 8397 8398 8399 8832 8833 8836 8837 8838 8839 8840 8841 8842 8843 8844 8845 8846 8847 8848 8849 8850 8851 8852 8853 8854 8855 8864 8865 8868 8869 8870 8871 8872 8873 8874 8875 8876 8877 8878 8879 8880 8881 8882 8883 8884 8885 8886 8887 8896 8897 8900 8901 8902 8903 8904 8905 8906 8907 8908 8909 8910 8911 9344 9345 9348 9349 9350 9351 9352 9353 9354 9355 9356 9357 9358 9359 9360 9361 9362 9363 9364 9365 9366 9367 9376 9377 9380 9381 9382 9383 9384 9385 9386 9387 9388 9389 9390 9391 9392 9393 9394 9395 9396 9397 9398 9399 9408 9409 9412 9413 9414 9415 9416 9417 9418 9419 9420 9421 9422 9423 9856 9857 9860 9861 9862 9863 9864 9865 9866 9867 9868 9869 9870 9871 9872 9873 9874 9875 9876 9877 9878 9879 9888 9889 9892 9893 9894 9895 9896 9897 9898 9899 9900 9901 9902 9903 9904 9905 9906 9907 9908 9909 9910 9911 9920 9921 9924 9925 9926 9927 9928 9929 9930 9931 9932 9933 9934 9935 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook PROGRAM NUMBER DECIMAL ADDRESSES (2.xx) Segment.9.GsoakType Segment.9.GsoakVal Segment.9.TimeEvent Segment.9.OnTime Segment.9.OffTime Segment.9.PIDSet Segment.9.PVWait Segment.9.WaitVal Segment.10.Type Segment.10.Holdback Segment.10.Duration Segment.10.RampRate Segment.10.TargetSP Segment.10.EndAction Segment.10.EventOutputs Segment.10.WaitFor Segment.10.GobackSeg Segment.10.GobackCycles Segment.10.PVEvent Segment.10.PVThreshold Segment.10.UserVal Segment.10.GsoakType Segment.10.GsoakVal Segment.10.TimeEvent Segment.10.OnTime Segment.10.OffTime Segment.10.PIDSet Segment.10.PVWait Segment.10.WaitVal Segment.11.Type Segment.11.Holdback Segment.11.Duration Segment.11.RampRate Segment.11.TargetSP Segment.11.EndAction Segment.11.EventOutputs Segment.11.WaitFor Segment.11.GobackSeg Segment.11.GobackCycles Segment.11.PVEvent Segment.11.PVThreshold Segment.11.UserVal Segment.11.GsoakType Segment.11.GsoakVal Segment.11.TimeEvent Segment.11.OnTime Segment.11.OffTime Segment.11.PIDSet Segment.11.PVWait Segment.11.WaitVal Segment.12.Type Segment.12.Holdback Segment.12.Duration Segment.12.RampRate Segment.12.TargetSP Segment.12.EndAction Part No HA028581 Issue 3 Sep-05 1 2 3 4 5 6 7 8 6352 6353 6354 6355 6356 6357 6358 6359 6368 6369 6372 6373 6374 6375 6376 6377 6378 6379 6380 6381 6382 6383 6384 6385 6386 6387 6388 6389 6390 6391 6400 6401 6404 6405 6406 6407 6408 6409 6410 6411 6412 6413 6414 6415 6416 6417 6418 6419 6420 6421 6422 6423 6432 6433 6436 6437 6438 6439 6864 6865 6866 6867 6868 6869 6870 6871 6880 6881 6884 6885 6886 6887 6888 6889 6890 6891 6892 6893 6894 6895 6896 6897 6898 6899 6900 6901 6902 6903 6912 6913 6916 6917 6918 6919 6920 6921 6922 6923 6924 6925 6926 6927 6928 6929 6930 6931 6932 6933 6934 6935 6944 6945 6948 6949 6950 6951 7376 7377 7378 7379 7380 7381 7382 7383 7392 7393 7396 7397 7398 7399 7400 7401 7402 7403 7404 7405 7406 7407 7408 7409 7410 7411 7412 7413 7414 7415 7424 7425 7428 7429 7430 7431 7432 7433 7434 7435 7436 7437 7438 7439 7440 7441 7442 7443 7444 7445 7446 7447 7456 7457 7460 7461 7462 7463 7888 7889 7890 7891 7892 7893 7894 7895 7904 7905 7908 7909 7910 7911 7912 7913 7914 7915 7916 7917 7918 7919 7920 7921 7922 7923 7924 7925 7926 7927 7936 7937 7940 7941 7942 7943 7944 7945 7946 7947 7948 7949 7950 7951 7952 7953 7954 7955 7956 7957 7958 7959 7968 7969 7972 7973 7974 7975 8400 8401 8402 8403 8404 8405 8406 8407 8416 8417 8420 8421 8422 8423 8424 8425 8426 8427 8428 8429 8430 8431 8432 8433 8434 8435 8436 8437 8438 8439 8448 8449 8452 8453 8454 8455 8456 8457 8458 8459 8460 8461 8462 8463 8464 8465 8466 8467 8468 8469 8470 8471 8480 8481 8484 8485 8486 8487 8912 8913 8914 8915 8916 8917 8918 8919 8928 8929 8932 8933 8934 8935 8936 8937 8938 8939 8940 8941 8942 8943 8944 8945 8946 8947 8948 8949 8950 8951 8960 8961 8964 8965 8966 8967 8968 8969 8970 8971 8972 8973 8974 8975 8976 8977 8978 8979 8980 8981 8982 8983 8992 8993 8996 8997 8998 8999 9424 9425 9426 9427 9428 9429 9430 9431 9440 9441 9444 9445 9446 9447 9448 9449 9450 9451 9452 9453 9454 9455 9456 9457 9458 9459 9460 9461 9462 9463 9472 9473 9476 9477 9478 9479 9480 9481 9482 9483 9484 9485 9486 9487 9488 9489 9490 9491 9492 9493 9494 9495 9504 9505 9508 9509 9510 9511 9936 9937 9938 9939 9940 9941 9942 9943 9952 9953 9956 9957 9958 9959 9960 9961 9962 9963 9964 9965 9966 9967 9968 9969 9970 9971 9972 9973 9974 9975 9984 9985 9988 9989 9990 9991 9992 9993 9994 9995 9996 9997 9998 9999 10000 10001 10002 10003 10004 10005 10006 10007 10016 10017 10020 10021 10022 10023 241 Engineering Handbook PROGRAM NUMBER DECIMAL ADDRESSES (2.xx) Segment.12.EventOutputs Segment.12.WaitFor Segment.12.GobackSeg Segment.12.GobackCycles Segment.12.PVEvent Segment.12.PVThreshold Segment.12.UserVal Segment.12.GsoakType Segment.12.GsoakVal Segment.12.TimeEvent Segment.12.OnTime Segment.12.OffTime Segment.12.PIDSet Segment.12.PVWait Segment.12.WaitVal Segment.13.Type Segment.13.Holdback Segment.13.Duration Segment.13.RampRate Segment.13.TargetSP Segment.13.EndAction Segment.13.EventOutputs Segment.13.WaitFor Segment.13.GobackSeg Segment.13.GobackCycles Segment.13.PVEvent Segment.13.PVThreshold Segment.13.UserVal Segment.13.GsoakType Segment.13.GsoakVal Segment.13.TimeEvent Segment.13.OnTime Segment.13.OffTime Segment.13.PIDSet Segment.13.PVWait Segment.13.WaitVal Segment.14.Type Segment.14.Holdback Segment.14.Duration Segment.14.RampRate Segment.14.TargetSP Segment.14.EndAction Segment.14.EventOutputs Segment.14.WaitFor Segment.14.GobackSeg Segment.14.GobackCycles Segment.14.PVEvent Segment.14.PVThreshold Segment.14.UserVal Segment.14.GsoakType Segment.14.GsoakVal Segment.14.TimeEvent Segment.14.OnTime Segment.14.OffTime Segment.14.PIDSet 242 Mini8 Controller 1 2 3 4 5 6 7 8 6440 6441 6442 6443 6444 6445 6446 6447 6448 6449 6450 6451 6452 6453 6454 6455 6464 6465 6468 6469 6470 6471 6472 6473 6474 6475 6476 6477 6478 6479 6480 6481 6482 6483 6484 6485 6486 6487 6496 6497 6500 6501 6502 6503 6504 6505 6506 6507 6508 6509 6510 6511 6512 6513 6514 6515 6516 6517 6952 6953 6954 6955 6956 6957 6958 6959 6960 6961 6962 6963 6964 6965 6966 6967 6976 6977 6980 6981 6982 6983 6984 6985 6986 6987 6988 6989 6990 6991 6992 6993 6994 6995 6996 6997 6998 6999 7008 7009 7012 7013 7014 7015 7016 7017 7018 7019 7020 7021 7022 7023 7024 7025 7026 7027 7028 7029 7464 7465 7466 7467 7468 7469 7470 7471 7472 7473 7474 7475 7476 7477 7478 7479 7488 7489 7492 7493 7494 7495 7496 7497 7498 7499 7500 7501 7502 7503 7504 7505 7506 7507 7508 7509 7510 7511 7520 7521 7524 7525 7526 7527 7528 7529 7530 7531 7532 7533 7534 7535 7536 7537 7538 7539 7540 7541 7976 7977 7978 7979 7980 7981 7982 7983 7984 7985 7986 7987 7988 7989 7990 7991 8000 8001 8004 8005 8006 8007 8008 8009 8010 8011 8012 8013 8014 8015 8016 8017 8018 8019 8020 8021 8022 8023 8032 8033 8036 8037 8038 8039 8040 8041 8042 8043 8044 8045 8046 8047 8048 8049 8050 8051 8052 8053 8488 8489 8490 8491 8492 8493 8494 8495 8496 8497 8498 8499 8500 8501 8502 8503 8512 8513 8516 8517 8518 8519 8520 8521 8522 8523 8524 8525 8526 8527 8528 8529 8530 8531 8532 8533 8534 8535 8544 8545 8548 8549 8550 8551 8552 8553 8554 8555 8556 8557 8558 8559 8560 8561 8562 8563 8564 8565 9000 9001 9002 9003 9004 9005 9006 9007 9008 9009 9010 9011 9012 9013 9014 9015 9024 9025 9028 9029 9030 9031 9032 9033 9034 9035 9036 9037 9038 9039 9040 9041 9042 9043 9044 9045 9046 9047 9056 9057 9060 9061 9062 9063 9064 9065 9066 9067 9068 9069 9070 9071 9072 9073 9074 9075 9076 9077 9512 9513 9514 9515 9516 9517 9518 9519 9520 9521 9522 9523 9524 9525 9526 9527 9536 9537 9540 9541 9542 9543 9544 9545 9546 9547 9548 9549 9550 9551 9552 9553 9554 9555 9556 9557 9558 9559 9568 9569 9572 9573 9574 9575 9576 9577 9578 9579 9580 9581 9582 9583 9584 9585 9586 9587 9588 9589 10024 10025 10026 10027 10028 10029 10030 10031 10032 10033 10034 10035 10036 10037 10038 10039 10048 10049 10052 10053 10054 10055 10056 10057 10058 10059 10060 10061 10062 10063 10064 10065 10066 10067 10068 10069 10070 10071 10080 10081 10084 10085 10086 10087 10088 10089 10090 10091 10092 10093 10094 10095 10096 10097 10098 10099 10100 10101 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook PROGRAM NUMBER DECIMAL ADDRESSES (2.xx) Segment.14.PVWait Segment.14.WaitVal Segment.15.Type Segment.15.Holdback Segment.15.Duration Segment.15.RampRate Segment.15.TargetSP Segment.15.EndAction Segment.15.EventOutputs Segment.15.WaitFor Segment.15.GobackSeg Segment.15.GobackCycles Segment.15.PVEvent Segment.15.PVThreshold Segment.15.UserVal Segment.15.GsoakType Segment.15.GsoakVal Segment.15.TimeEvent Segment.15.OnTime Segment.15.OffTime Segment.15.PIDSet Segment.15.PVWait Segment.15.WaitVal Segment.16.Type Segment.16.Holdback Segment.16.Duration Segment.16.RampRate Segment.16.TargetSP Segment.16.EndAction Segment.16.EventOutputs Segment.16.WaitFor Segment.16.GobackSeg Segment.16.GobackCycles Segment.16.PVEvent Segment.16.PVThreshold Segment.16.UserVal Segment.16.GsoakType Segment.16.GsoakVal Segment.16.TimeEvent Segment.16.OnTime Segment.16.OffTime Segment.16.PIDSet Segment.16.PVWait Segment.16.WaitVal Part No HA028581 Issue 3 Sep-05 1 2 3 4 5 6 7 8 6518 6519 6528 6529 6532 6533 6534 6535 6536 6537 6538 6539 6540 6541 6542 6543 6544 6545 6546 6547 6548 6549 6550 6551 6560 6561 6564 6565 6566 6567 6568 6569 6570 6571 6572 6573 6574 6575 6576 6577 6578 6579 6580 6581 6582 6583 7030 7031 7040 7041 7044 7045 7046 7047 7048 7049 7050 7051 7052 7053 7054 7055 7056 7057 7058 7059 7060 7061 7062 7063 7072 7073 7076 7077 7078 7079 7080 7081 7082 7083 7084 7085 7086 7087 7088 7089 7090 7091 7092 7093 7094 7095 7542 7543 7552 7553 7556 7557 7558 7559 7560 7561 7562 7563 7564 7565 7566 7567 7568 7569 7570 7571 7572 7573 7574 7575 7584 7585 7588 7589 7590 7591 7592 7593 7594 7595 7596 7597 7598 7599 7600 7601 7602 7603 7604 7605 7606 7607 8054 8055 8064 8065 8068 8069 8070 8071 8072 8073 8074 8075 8076 8077 8078 8079 8080 8081 8082 8083 8084 8085 8086 8087 8096 8097 8100 8101 8102 8103 8104 8105 8106 8107 8108 8109 8110 8111 8112 8113 8114 8115 8116 8117 8118 8119 8566 8567 8576 8577 8580 8581 8582 8583 8584 8585 8586 8587 8588 8589 8590 8591 8592 8593 8594 8595 8596 8597 8598 8599 8608 8609 8612 8613 8614 8615 8616 8617 8618 8619 8620 8621 8622 8623 8624 8625 8626 8627 8628 8629 8630 8631 9078 9079 9088 9089 9092 9093 9094 9095 9096 9097 9098 9099 9100 9101 9102 9103 9104 9105 9106 9107 9108 9109 9110 9111 9120 9121 9124 9125 9126 9127 9128 9129 9130 9131 9132 9133 9134 9135 9136 9137 9138 9139 9140 9141 9142 9143 9590 9591 9600 9601 9604 9605 9606 9607 9608 9609 9610 9611 9612 9613 9614 9615 9616 9617 9618 9619 9620 9621 9622 9623 9632 9633 9636 9637 9638 9639 9640 9641 9642 9643 9644 9645 9646 9647 9648 9649 9650 9651 9652 9653 9654 9655 10102 10103 10112 10113 10116 10117 10118 10119 10120 10121 10122 10123 10124 10125 10126 10127 10128 10129 10130 10131 10132 10133 10134 10135 10144 10145 10148 10149 10150 10151 10152 10153 10154 10155 10156 10157 10158 10159 10160 10161 10162 10163 10164 10165 10166 10167 243 Engineering Handbook Mini8 Controller 23.2.2 Version 2.xx Programmer Addresses - Hexadecimal PROGRAM NUMBER HEXADECIMAL ADDRESS (2.xx) Comms.n.ProgramNumber Program.n.HoldbackVal Program.n.RampUnits Program.n.DwellUnits Program.n.Cycles Programmer.n.PowerFailAct Programmer.n.Servo Programmer.n.SyncMode Programmer.n.ResetEventOuts Programmer.n.CurProg Programmer.n.CurSeg Programmer.n.ProgStatus Programmer.n.PSP Programmer.n.CyclesLeft Programmer.n.CurSegType Programmer.n.SegTarget Programmer.n.SegRate Programmer.n.ProgTimeLeft Programmer.n.PVIn Programmer.n.SPIn Programmer.n.EventOuts Programmer.n.SegTimeLeft Programmer.n.EndOfSeg Programmer.n.SyncIn Programmer.n.FastRun Programmer.n.AdvSeg Programmer.n.SkipSeg Program.n.PVStart Programmer.n.PrgIn1 Programmer.n.PrgIn2 Programmer.n.PVWaitIP Programmer.n.ProgError Programmer.n.PVEventOP Programmer.n.GoBackCyclesLeft Programmer.n.DelayTime Programmer.n.ProgReset Programmer.n.ProgRun Programmer.n.ProgHold Programmer.n.ProgRunHold Programmer.n.ProgRunReset Segment.1.Type Segment.1.Holdback Segment.1.CallProgNum Segment.1.Cycles Segment.1.Duration Segment.1.RampRate Segment.1.TargetSP Segment.1.EndAction Segment.1.EventOutputs Segment.1.WaitFor Segment.1.PVEvent Segment.1.PVThreshold 244 1 2 3 4 5 6 7 8 15C0 15C1 15C2 15C3 15C4 15C5 15C6 15C7 15C8 15C9 15CA 15CB 15CC 15CD 15CE 15CF 15D0 15D1 15D2 15D3 15D4 15D5 15D6 15D7 15D8 15D9 15DA 15DD 15E2 15E3 15E4 15E5 15E6 160D 1635 165E 1688 16B3 16DF 170C 17C0 17C1 17C2 17C3 17C4 17C5 17C6 17C7 17C8 17C9 17CA 17CD 17CE 1600 1601 1602 1603 1604 1605 1606 1607 1608 1609 160A 160B 160C 160D 160E 160F 1610 1611 1612 1613 1614 1615 1616 1617 1618 1619 161A 161D 1622 1623 1624 1625 1626 164D 1675 169E 16C8 16F3 171F 174C 19C0 19C1 19C2 19C3 19C4 19C5 19C6 19C7 19C8 19C9 19CA 19CD 19CE 1640 1641 1642 1643 1644 1645 1646 1647 1648 1649 164A 164B 164C 164D 164E 164F 1650 1651 1652 1653 1654 1655 1656 1657 1658 1659 165A 165D 1662 1663 1664 1665 1666 168D 16B5 16DE 1708 1733 175F 178C 1BC0 1BC1 1BC2 1BC3 1BC4 1BC5 1BC6 1BC7 1BC8 1BC9 1BCA 1BCD 1BCE 1680 1681 1682 1683 1684 1685 1686 1687 1688 1689 168A 168B 168C 168D 168E 168F 1690 1691 1692 1693 1694 1695 1696 1697 1698 1699 169A 169D 16A2 16A3 16A4 16A5 16A6 16CD 16F5 171E 1748 1773 179F 17CC 1DC0 1DC1 1DC2 1DC3 1DC4 1DC5 1DC6 1DC7 1DC8 1DC9 1DCA 1DCD 1DCE 16C0 16C1 16C2 16C3 16C4 16C5 16C6 16C7 16C8 16C9 16CA 16CB 16CC 16CD 16CE 16CF 16D0 16D1 16D2 16D3 16D4 16D5 16D6 16D7 16D8 16D9 16DA 16DD 16E2 16E3 16E4 16E5 16E6 170D 1735 175E 1788 17B3 17DF 180C 1FC0 1FC1 1FC2 1FC3 1FC4 1FC5 1FC6 1FC7 1FC8 1FC9 1FCA 1FCD 1FCE 1700 1701 1702 1703 1704 1705 1706 1707 1708 1709 170A 170B 170C 170D 170E 170F 1710 1711 1712 1713 1714 1715 1716 1717 1718 1719 171A 171D 1722 1723 1724 1725 1726 174D 1775 179E 17C8 17F3 181F 184C 21C0 21C1 21C2 21C3 21C4 21C5 21C6 21C7 21C8 21C9 21CA 21CD 21CE 1740 1741 1742 1743 1744 1745 1746 1747 1748 1749 174A 174B 174C 174D 174E 174F 1750 1751 1752 1753 1754 1755 1756 1757 1758 1759 175A 175D 1762 1763 1764 1765 1766 178D 17B5 17DE 1808 1833 185F 188C 23C0 23C1 23C2 23C3 23C4 23C5 23C6 23C7 23C8 23C9 23CA 23CD 23CE 1780 1781 1782 1783 1784 1785 1786 1787 1788 1789 178A 178B 178C 178D 178E 178F 1790 1791 1792 1793 1794 1795 1796 1797 1798 1799 179A 179D 17A2 17A3 17A4 17A5 17A6 17CD 17F5 181E 1848 1873 189F 18CC 25C0 25C1 25C2 25C3 25C4 25C5 25C6 25C7 25C8 25C9 25CA 25CD 25CE Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook PROGRAM NUMBER HEXADECIMAL ADDRESS (2.xx) Segment.1.UserVal Segment.1.GsoakType Segment.1.GsoakVal Segment.1.TimeEvent Segment.1.OnTime Segment.1.OffTime Segment.1.PIDSet Segment.1.PVWait Segment.1.WaitVal Segment.2.Type Segment.2.Holdback Segment.2.Duration Segment.2.RampRate Segment.2.TargetSP Segment.2.EndAction Segment.2.EventOutputs Segment.2.WaitFor Segment.2.GobackSeg Segment.2.GobackCycles Segment.2.PVEvent Segment.2.PVThreshold Segment.2.UserVal Segment.2.GsoakType Segment.2.GsoakVal Segment.2.TimeEvent Segment.2.OnTime Segment.2.OffTime Segment.2.PIDSet Segment.2.PVWait Segment.2.WaitVal Segment.3.Type Segment.3.Holdback Segment.3.Duration Segment.3.RampRate Segment.3.TargetSP Segment.3.EndAction Segment.3.EventOutputs Segment.3.WaitFor Segment.3.GobackSeg Segment.3.GobackCycles Segment.3.PVEvent Segment.3.PVThreshold Segment.3.UserVal Segment.3.GsoakType Segment.3.GsoakVal Segment.3.TimeEvent Segment.3.OnTime Segment.3.OffTime Segment.3.PIDSet Segment.3.PVWait Segment.3.WaitVal Segment.4.Type Segment.4.Holdback Segment.4.Duration Segment.4.RampRate Segment.4.TargetSP Part No HA028581 Issue 3 Sep-05 1 2 3 4 5 6 7 8 17CF 17D0 17D1 17D2 17D3 17D4 17D5 17D6 17D7 17E0 17E1 17E4 17E5 17E6 17E7 17E8 17E9 17EA 17EB 17EC 17ED 17EE 17EF 17F0 17F1 17F2 17F3 17F4 17F5 17F6 17F7 1800 1801 1804 1805 1806 1807 1808 1809 180A 180B 180C 180D 180E 180F 1810 1811 1812 1813 1814 1815 1816 1817 1820 1821 1824 1825 1826 19CF 19D0 19D1 19D2 19D3 19D4 19D5 19D6 19D7 19E0 19E1 19E4 19E5 19E6 19E7 19E8 19E9 19EA 19EB 19EC 19ED 19EE 19EF 19F0 19F1 19F2 19F3 19F4 19F5 19F6 19F7 1A00 1A01 1A04 1A05 1A06 1A07 1A08 1A09 1A0A 1A0B 1A0C 1A0D 1A0E 1A0F 1A10 1A11 1A12 1A13 1A14 1A15 1A16 1A17 1A20 1A21 1A24 1A25 1A26 1BCF 1BD0 1BD1 1BD2 1BD3 1BD4 1BD5 1BD6 1BD7 1BE0 1BE1 1BE4 1BE5 1BE6 1BE7 1BE8 1BE9 1BEA 1BEB 1BEC 1BED 1BEE 1BEF 1BF0 1BF1 1BF2 1BF3 1BF4 1BF5 1BF6 1BF7 1C00 1C01 1C04 1C05 1C06 1C07 1C08 1C09 1C0A 1C0B 1C0C 1C0D 1C0E 1C0F 1C10 1C11 1C12 1C13 1C14 1C15 1C16 1C17 1C20 1C21 1C24 1C25 1C26 1DCF 1DD0 1DD1 1DD2 1DD3 1DD4 1DD5 1DD6 1DD7 1DE0 1DE1 1DE4 1DE5 1DE6 1DE7 1DE8 1DE9 1DEA 1DEB 1DEC 1DED 1DEE 1DEF 1DF0 1DF1 1DF2 1DF3 1DF4 1DF5 1DF6 1DF7 1E00 1E01 1E04 1E05 1E06 1E07 1E08 1E09 1E0A 1E0B 1E0C 1E0D 1E0E 1E0F 1E10 1E11 1E12 1E13 1E14 1E15 1E16 1E17 1E20 1E21 1E24 1E25 1E26 1FCF 1FD0 1FD1 1FD2 1FD3 1FD4 1FD5 1FD6 1FD7 1FE0 1FE1 1FE4 1FE5 1FE6 1FE7 1FE8 1FE9 1FEA 1FEB 1FEC 1FED 1FEE 1FEF 1FF0 1FF1 1FF2 1FF3 1FF4 1FF5 1FF6 1FF7 2000 2001 2004 2005 2006 2007 2008 2009 200A 200B 200C 200D 200E 200F 2010 2011 2012 2013 2014 2015 2016 2017 2020 2021 2024 2025 2026 21CF 21D0 21D1 21D2 21D3 21D4 21D5 21D6 21D7 21E0 21E1 21E4 21E5 21E6 21E7 21E8 21E9 21EA 21EB 21EC 21ED 21EE 21EF 21F0 21F1 21F2 21F3 21F4 21F5 21F6 21F7 2200 2201 2204 2205 2206 2207 2208 2209 220A 220B 220C 220D 220E 220F 2210 2211 2212 2213 2214 2215 2216 2217 2220 2221 2224 2225 2226 23CF 23D0 23D1 23D2 23D3 23D4 23D5 23D6 23D7 23E0 23E1 23E4 23E5 23E6 23E7 23E8 23E9 23EA 23EB 23EC 23ED 23EE 23EF 23F0 23F1 23F2 23F3 23F4 23F5 23F6 23F7 2400 2401 2404 2405 2406 2407 2408 2409 240A 240B 240C 240D 240E 240F 2410 2411 2412 2413 2414 2415 2416 2417 2420 2421 2424 2425 2426 25CF 25D0 25D1 25D2 25D3 25D4 25D5 25D6 25D7 25E0 25E1 25E4 25E5 25E6 25E7 25E8 25E9 25EA 25EB 25EC 25ED 25EE 25EF 25F0 25F1 25F2 25F3 25F4 25F5 25F6 25F7 2600 2601 2604 2605 2606 2607 2608 2609 260A 260B 260C 260D 260E 260F 2610 2611 2612 2613 2614 2615 2616 2617 2620 2621 2624 2625 2626 245 Engineering Handbook PROGRAM NUMBER HEXADECIMAL ADDRESS (2.xx) Segment.4.EndAction Segment.4.EventOutputs Segment.4.WaitFor Segment.4.GobackSeg Segment.4.GobackCycles Segment.4.PVEvent Segment.4.PVThreshold Segment.4.UserVal Segment.4.GsoakType Segment.4.GsoakVal Segment.4.TimeEvent Segment.4.OnTime Segment.4.OffTime Segment.4.PIDSet Segment.4.PVWait Segment.4.WaitVal Segment.5.Type Segment.5.Holdback Segment.5.Duration Segment.5.RampRate Segment.5.TargetSP Segment.5.EndAction Segment.5.EventOutputs Segment.5.WaitFor Segment.5.GobackSeg Segment.5.GobackCycles Segment.5.PVEvent Segment.5.PVThreshold Segment.5.UserVal Segment.5.GsoakType Segment.5.GsoakVal Segment.5.TimeEvent Segment.5.OnTime Segment.5.OffTime Segment.5.PIDSet Segment.5.PVWait Segment.5.WaitVal Segment.6.Type Segment.6.Holdback Segment.6.Duration Segment.6.RampRate Segment.6.TargetSP Segment.6.EndAction Segment.6.EventOutputs Segment.6.WaitFor Segment.6.GobackSeg Segment.6.GobackCycles Segment.6.PVEvent Segment.6.PVThreshold Segment.6.UserVal Segment.6.GsoakType Segment.6.GsoakVal Segment.6.TimeEvent Segment.6.OnTime Segment.6.OffTime 246 Mini8 Controller 1 2 3 4 5 6 7 8 1827 1828 1829 182A 182B 182C 182D 182E 182F 1830 1831 1832 1833 1834 1835 1836 1837 1840 1841 1844 1845 1846 1847 1848 1849 184A 184B 184C 184D 184E 184F 1850 1851 1852 1853 1854 1855 1856 1857 1860 1861 1864 1865 1866 1867 1868 1869 186A 186B 186C 186D 186E 186F 1870 1871 1872 1873 1874 1A27 1A28 1A29 1A2A 1A2B 1A2C 1A2D 1A2E 1A2F 1A30 1A31 1A32 1A33 1A34 1A35 1A36 1A37 1A40 1A41 1A44 1A45 1A46 1A47 1A48 1A49 1A4A 1A4B 1A4C 1A4D 1A4E 1A4F 1A50 1A51 1A52 1A53 1A54 1A55 1A56 1A57 1A60 1A61 1A64 1A65 1A66 1A67 1A68 1A69 1A6A 1A6B 1A6C 1A6D 1A6E 1A6F 1A70 1A71 1A72 1A73 1A74 1C27 1C28 1C29 1C2A 1C2B 1C2C 1C2D 1C2E 1C2F 1C30 1C31 1C32 1C33 1C34 1C35 1C36 1C37 1C40 1C41 1C44 1C45 1C46 1C47 1C48 1C49 1C4A 1C4B 1C4C 1C4D 1C4E 1C4F 1C50 1C51 1C52 1C53 1C54 1C55 1C56 1C57 1C60 1C61 1C64 1C65 1C66 1C67 1C68 1C69 1C6A 1C6B 1C6C 1C6D 1C6E 1C6F 1C70 1C71 1C72 1C73 1C74 1E27 1E28 1E29 1E2A 1E2B 1E2C 1E2D 1E2E 1E2F 1E30 1E31 1E32 1E33 1E34 1E35 1E36 1E37 1E40 1E41 1E44 1E45 1E46 1E47 1E48 1E49 1E4A 1E4B 1E4C 1E4D 1E4E 1E4F 1E50 1E51 1E52 1E53 1E54 1E55 1E56 1E57 1E60 1E61 1E64 1E65 1E66 1E67 1E68 1E69 1E6A 1E6B 1E6C 1E6D 1E6E 1E6F 1E70 1E71 1E72 1E73 1E74 2027 2028 2029 202A 202B 202C 202D 202E 202F 2030 2031 2032 2033 2034 2035 2036 2037 2040 2041 2044 2045 2046 2047 2048 2049 204A 204B 204C 204D 204E 204F 2050 2051 2052 2053 2054 2055 2056 2057 2060 2061 2064 2065 2066 2067 2068 2069 206A 206B 206C 206D 206E 206F 2070 2071 2072 2073 2074 2227 2228 2229 222A 222B 222C 222D 222E 222F 2230 2231 2232 2233 2234 2235 2236 2237 2240 2241 2244 2245 2246 2247 2248 2249 224A 224B 224C 224D 224E 224F 2250 2251 2252 2253 2254 2255 2256 2257 2260 2261 2264 2265 2266 2267 2268 2269 226A 226B 226C 226D 226E 226F 2270 2271 2272 2273 2274 2427 2428 2429 242A 242B 242C 242D 242E 242F 2430 2431 2432 2433 2434 2435 2436 2437 2440 2441 2444 2445 2446 2447 2448 2449 244A 244B 244C 244D 244E 244F 2450 2451 2452 2453 2454 2455 2456 2457 2460 2461 2464 2465 2466 2467 2468 2469 246A 246B 246C 246D 246E 246F 2470 2471 2472 2473 2474 2627 2628 2629 262A 262B 262C 262D 262E 262F 2630 2631 2632 2633 2634 2635 2636 2637 2640 2641 2644 2645 2646 2647 2648 2649 264A 264B 264C 264D 264E 264F 2650 2651 2652 2653 2654 2655 2656 2657 2660 2661 2664 2665 2666 2667 2668 2669 266A 266B 266C 266D 266E 266F 2670 2671 2672 2673 2674 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook PROGRAM NUMBER HEXADECIMAL ADDRESS (2.xx) Segment.6.PIDSet Segment.6.PVWait Segment.6.WaitVal Segment.7.Type Segment.7.Holdback Segment.7.Duration Segment.7.RampRate Segment.7.TargetSP Segment.7.EndAction Segment.7.EventOutputs Segment.7.WaitFor Segment.7.GobackSeg Segment.7.GobackCycles Segment.7.PVEvent Segment.7.PVThreshold Segment.7.UserVal Segment.7.GsoakType Segment.7.GsoakVal Segment.7.TimeEvent Segment.7.OnTime Segment.7.OffTime Segment.7.PIDSet Segment.7.PVWait Segment.7.WaitVal Segment.8.Type Segment.8.Holdback Segment.8.Duration Segment.8.RampRate Segment.8.TargetSP Segment.8.EndAction Segment.8.EventOutputs Segment.8.WaitFor Segment.8.GobackSeg Segment.8.GobackCycles Segment.8.PVEvent Segment.8.PVThreshold Segment.8.UserVal Segment.8.GsoakType Segment.8.GsoakVal Segment.8.TimeEvent Segment.8.OnTime Segment.8.OffTime Segment.8.PIDSet Segment.8.PVWait Segment.8.WaitVal Segment.9.Type Segment.9.Holdback Segment.9.Duration Segment.9.RampRate Segment.9.TargetSP Segment.9.EndAction Segment.9.EventOutputs Segment.9.WaitFor Segment.9.GobackSeg Segment.9.GobackCycles Part No HA028581 Issue 3 Sep-05 1 2 3 4 5 6 7 8 1875 1876 1877 1880 1881 1884 1885 1886 1887 1888 1889 188A 188B 188C 188D 188E 188F 1890 1891 1892 1893 1894 1895 1896 1897 18A0 18A1 18A4 18A5 18A6 18A7 18A8 18A9 18AA 18AB 18AC 18AD 18AE 18AF 18B0 18B1 18B2 18B3 18B4 18B5 18B6 18B7 18C0 18C1 18C4 18C5 18C6 18C7 18C8 18C9 18CA 18CB 18CC 1A75 1A76 1A77 1A80 1A81 1A84 1A85 1A86 1A87 1A88 1A89 1A8A 1A8B 1A8C 1A8D 1A8E 1A8F 1A90 1A91 1A92 1A93 1A94 1A95 1A96 1A97 1AA0 1AA1 1AA4 1AA5 1AA6 1AA7 1AA8 1AA9 1AAA 1AAB 1AAC 1AAD 1AAE 1AAF 1AB0 1AB1 1AB2 1AB3 1AB4 1AB5 1AB6 1AB7 1AC0 1AC1 1AC4 1AC5 1AC6 1AC7 1AC8 1AC9 1ACA 1ACB 1ACC 1C75 1C76 1C77 1C80 1C81 1C84 1C85 1C86 1C87 1C88 1C89 1C8A 1C8B 1C8C 1C8D 1C8E 1C8F 1C90 1C91 1C92 1C93 1C94 1C95 1C96 1C97 1CA0 1CA1 1CA4 1CA5 1CA6 1CA7 1CA8 1CA9 1CAA 1CAB 1CAC 1CAD 1CAE 1CAF 1CB0 1CB1 1CB2 1CB3 1CB4 1CB5 1CB6 1CB7 1CC0 1CC1 1CC4 1CC5 1CC6 1CC7 1CC8 1CC9 1CCA 1CCB 1CCC 1E75 1E76 1E77 1E80 1E81 1E84 1E85 1E86 1E87 1E88 1E89 1E8A 1E8B 1E8C 1E8D 1E8E 1E8F 1E90 1E91 1E92 1E93 1E94 1E95 1E96 1E97 1EA0 1EA1 1EA4 1EA5 1EA6 1EA7 1EA8 1EA9 1EAA 1EAB 1EAC 1EAD 1EAE 1EAF 1EB0 1EB1 1EB2 1EB3 1EB4 1EB5 1EB6 1EB7 1EC0 1EC1 1EC4 1EC5 1EC6 1EC7 1EC8 1EC9 1ECA 1ECB 1ECC 2075 2076 2077 2080 2081 2084 2085 2086 2087 2088 2089 208A 208B 208C 208D 208E 208F 2090 2091 2092 2093 2094 2095 2096 2097 20A0 20A1 20A4 20A5 20A6 20A7 20A8 20A9 20AA 20AB 20AC 20AD 20AE 20AF 20B0 20B1 20B2 20B3 20B4 20B5 20B6 20B7 20C0 20C1 20C4 20C5 20C6 20C7 20C8 20C9 20CA 20CB 20CC 2275 2276 2277 2280 2281 2284 2285 2286 2287 2288 2289 228A 228B 228C 228D 228E 228F 2290 2291 2292 2293 2294 2295 2296 2297 22A0 22A1 22A4 22A5 22A6 22A7 22A8 22A9 22AA 22AB 22AC 22AD 22AE 22AF 22B0 22B1 22B2 22B3 22B4 22B5 22B6 22B7 22C0 22C1 22C4 22C5 22C6 22C7 22C8 22C9 22CA 22CB 22CC 2475 2476 2477 2480 2481 2484 2485 2486 2487 2488 2489 248A 248B 248C 248D 248E 248F 2490 2491 2492 2493 2494 2495 2496 2497 24A0 24A1 24A4 24A5 24A6 24A7 24A8 24A9 24AA 24AB 24AC 24AD 24AE 24AF 24B0 24B1 24B2 24B3 24B4 24B5 24B6 24B7 24C0 24C1 24C4 24C5 24C6 24C7 24C8 24C9 24CA 24CB 24CC 2675 2676 2677 2680 2681 2684 2685 2686 2687 2688 2689 268A 268B 268C 268D 268E 268F 2690 2691 2692 2693 2694 2695 2696 2697 26A0 26A1 26A4 26A5 26A6 26A7 26A8 26A9 26AA 26AB 26AC 26AD 26AE 26AF 26B0 26B1 26B2 26B3 26B4 26B5 26B6 26B7 26C0 26C1 26C4 26C5 26C6 26C7 26C8 26C9 26CA 26CB 26CC 247 Engineering Handbook PROGRAM NUMBER HEXADECIMAL ADDRESS (2.xx) Segment.9.PVEvent Segment.9.PVThreshold Segment.9.UserVal Segment.9.GsoakType Segment.9.GsoakVal Segment.9.TimeEvent Segment.9.OnTime Segment.9.OffTime Segment.9.PIDSet Segment.9.PVWait Segment.9.WaitVal Segment.10.Type Segment.10.Holdback Segment.10.Duration Segment.10.RampRate Segment.10.TargetSP Segment.10.EndAction Segment.10.EventOutputs Segment.10.WaitFor Segment.10.GobackSeg Segment.10.GobackCycles Segment.10.PVEvent Segment.10.PVThreshold Segment.10.UserVal Segment.10.GsoakType Segment.10.GsoakVal Segment.10.TimeEvent Segment.10.OnTime Segment.10.OffTime Segment.10.PIDSet Segment.10.PVWait Segment.10.WaitVal Segment.11.Type Segment.11.Holdback Segment.11.Duration Segment.11.RampRate Segment.11.TargetSP Segment.11.EndAction Segment.11.EventOutputs Segment.11.WaitFor Segment.11.GobackSeg Segment.11.GobackCycles Segment.11.PVEvent Segment.11.PVThreshold Segment.11.UserVal Segment.11.GsoakType Segment.11.GsoakVal Segment.11.TimeEvent Segment.11.OnTime Segment.11.OffTime Segment.11.PIDSet Segment.11.PVWait Segment.11.WaitVal Segment.12.Type Segment.12.Holdback Segment.12.Duration 248 Mini8 Controller 1 2 3 4 5 6 7 8 18CD 18CE 18CF 18D0 18D1 18D2 18D3 18D4 18D5 18D6 18D7 18E0 18E1 18E4 18E5 18E6 18E7 18E8 18E9 18EA 18EB 18EC 18ED 18EE 18EF 18F0 18F1 18F2 18F3 18F4 18F5 18F6 18F7 1900 1901 1904 1905 1906 1907 1908 1909 190A 190B 190C 190D 190E 190F 1910 1911 1912 1913 1914 1915 1916 1917 1920 1921 1924 1ACD 1ACE 1ACF 1AD0 1AD1 1AD2 1AD3 1AD4 1AD5 1AD6 1AD7 1AE0 1AE1 1AE4 1AE5 1AE6 1AE7 1AE8 1AE9 1AEA 1AEB 1AEC 1AED 1AEE 1AEF 1AF0 1AF1 1AF2 1AF3 1AF4 1AF5 1AF6 1AF7 1B00 1B01 1B04 1B05 1B06 1B07 1B08 1B09 1B0A 1B0B 1B0C 1B0D 1B0E 1B0F 1B10 1B11 1B12 1B13 1B14 1B15 1B16 1B17 1B20 1B21 1B24 1CCD 1CCE 1CCF 1CD0 1CD1 1CD2 1CD3 1CD4 1CD5 1CD6 1CD7 1CE0 1CE1 1CE4 1CE5 1CE6 1CE7 1CE8 1CE9 1CEA 1CEB 1CEC 1CED 1CEE 1CEF 1CF0 1CF1 1CF2 1CF3 1CF4 1CF5 1CF6 1CF7 1D00 1D01 1D04 1D05 1D06 1D07 1D08 1D09 1D0A 1D0B 1D0C 1D0D 1D0E 1D0F 1D10 1D11 1D12 1D13 1D14 1D15 1D16 1D17 1D20 1D21 1D24 1ECD 1ECE 1ECF 1ED0 1ED1 1ED2 1ED3 1ED4 1ED5 1ED6 1ED7 1EE0 1EE1 1EE4 1EE5 1EE6 1EE7 1EE8 1EE9 1EEA 1EEB 1EEC 1EED 1EEE 1EEF 1EF0 1EF1 1EF2 1EF3 1EF4 1EF5 1EF6 1EF7 1F00 1F01 1F04 1F05 1F06 1F07 1F08 1F09 1F0A 1F0B 1F0C 1F0D 1F0E 1F0F 1F10 1F11 1F12 1F13 1F14 1F15 1F16 1F17 1F20 1F21 1F24 20CD 20CE 20CF 20D0 20D1 20D2 20D3 20D4 20D5 20D6 20D7 20E0 20E1 20E4 20E5 20E6 20E7 20E8 20E9 20EA 20EB 20EC 20ED 20EE 20EF 20F0 20F1 20F2 20F3 20F4 20F5 20F6 20F7 2100 2101 2104 2105 2106 2107 2108 2109 210A 210B 210C 210D 210E 210F 2110 2111 2112 2113 2114 2115 2116 2117 2120 2121 2124 22CD 22CE 22CF 22D0 22D1 22D2 22D3 22D4 22D5 22D6 22D7 22E0 22E1 22E4 22E5 22E6 22E7 22E8 22E9 22EA 22EB 22EC 22ED 22EE 22EF 22F0 22F1 22F2 22F3 22F4 22F5 22F6 22F7 2300 2301 2304 2305 2306 2307 2308 2309 230A 230B 230C 230D 230E 230F 2310 2311 2312 2313 2314 2315 2316 2317 2320 2321 2324 24CD 24CE 24CF 24D0 24D1 24D2 24D3 24D4 24D5 24D6 24D7 24E0 24E1 24E4 24E5 24E6 24E7 24E8 24E9 24EA 24EB 24EC 24ED 24EE 24EF 24F0 24F1 24F2 24F3 24F4 24F5 24F6 24F7 2500 2501 2504 2505 2506 2507 2508 2509 250A 250B 250C 250D 250E 250F 2510 2511 2512 2513 2514 2515 2516 2517 2520 2521 2524 26CD 26CE 26CF 26D0 26D1 26D2 26D3 26D4 26D5 26D6 26D7 26E0 26E1 26E4 26E5 26E6 26E7 26E8 26E9 26EA 26EB 26EC 26ED 26EE 26EF 26F0 26F1 26F2 26F3 26F4 26F5 26F6 26F7 2700 2701 2704 2705 2706 2707 2708 2709 270A 270B 270C 270D 270E 270F 2710 2711 2712 2713 2714 2715 2716 2717 2720 2721 2724 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook PROGRAM NUMBER HEXADECIMAL ADDRESS (2.xx) Segment.12.RampRate Segment.12.TargetSP Segment.12.EndAction Segment.12.EventOutputs Segment.12.WaitFor Segment.12.GobackSeg Segment.12.GobackCycles Segment.12.PVEvent Segment.12.PVThreshold Segment.12.UserVal Segment.12.GsoakType Segment.12.GsoakVal Segment.12.TimeEvent Segment.12.OnTime Segment.12.OffTime Segment.12.PIDSet Segment.12.PVWait Segment.12.WaitVal Segment.13.Type Segment.13.Holdback Segment.13.Duration Segment.13.RampRate Segment.13.TargetSP Segment.13.EndAction Segment.13.EventOutputs Segment.13.WaitFor Segment.13.GobackSeg Segment.13.GobackCycles Segment.13.PVEvent Segment.13.PVThreshold Segment.13.UserVal Segment.13.GsoakType Segment.13.GsoakVal Segment.13.TimeEvent Segment.13.OnTime Segment.13.OffTime Segment.13.PIDSet Segment.13.PVWait Segment.13.WaitVal Segment.14.Type Segment.14.Holdback Segment.14.Duration Segment.14.RampRate Segment.14.TargetSP Segment.14.EndAction Segment.14.EventOutputs Segment.14.WaitFor Segment.14.GobackSeg Segment.14.GobackCycles Segment.14.PVEvent Segment.14.PVThreshold Segment.14.UserVal Segment.14.GsoakType Segment.14.GsoakVal Segment.14.TimeEvent Part No HA028581 Issue 3 Sep-05 1 2 3 4 5 6 7 8 1925 1926 1927 1928 1929 192A 192B 192C 192D 192E 192F 1930 1931 1932 1933 1934 1935 1936 1937 1940 1941 1944 1945 1946 1947 1948 1949 194A 194B 194C 194D 194E 194F 1950 1951 1952 1953 1954 1955 1956 1957 1960 1961 1964 1965 1966 1967 1968 1969 196A 196B 196C 196D 196E 196F 1970 1971 1972 1B25 1B26 1B27 1B28 1B29 1B2A 1B2B 1B2C 1B2D 1B2E 1B2F 1B30 1B31 1B32 1B33 1B34 1B35 1B36 1B37 1B40 1B41 1B44 1B45 1B46 1B47 1B48 1B49 1B4A 1B4B 1B4C 1B4D 1B4E 1B4F 1B50 1B51 1B52 1B53 1B54 1B55 1B56 1B57 1B60 1B61 1B64 1B65 1B66 1B67 1B68 1B69 1B6A 1B6B 1B6C 1B6D 1B6E 1B6F 1B70 1B71 1B72 1D25 1D26 1D27 1D28 1D29 1D2A 1D2B 1D2C 1D2D 1D2E 1D2F 1D30 1D31 1D32 1D33 1D34 1D35 1D36 1D37 1D40 1D41 1D44 1D45 1D46 1D47 1D48 1D49 1D4A 1D4B 1D4C 1D4D 1D4E 1D4F 1D50 1D51 1D52 1D53 1D54 1D55 1D56 1D57 1D60 1D61 1D64 1D65 1D66 1D67 1D68 1D69 1D6A 1D6B 1D6C 1D6D 1D6E 1D6F 1D70 1D71 1D72 1F25 1F26 1F27 1F28 1F29 1F2A 1F2B 1F2C 1F2D 1F2E 1F2F 1F30 1F31 1F32 1F33 1F34 1F35 1F36 1F37 1F40 1F41 1F44 1F45 1F46 1F47 1F48 1F49 1F4A 1F4B 1F4C 1F4D 1F4E 1F4F 1F50 1F51 1F52 1F53 1F54 1F55 1F56 1F57 1F60 1F61 1F64 1F65 1F66 1F67 1F68 1F69 1F6A 1F6B 1F6C 1F6D 1F6E 1F6F 1F70 1F71 1F72 2125 2126 2127 2128 2129 212A 212B 212C 212D 212E 212F 2130 2131 2132 2133 2134 2135 2136 2137 2140 2141 2144 2145 2146 2147 2148 2149 214A 214B 214C 214D 214E 214F 2150 2151 2152 2153 2154 2155 2156 2157 2160 2161 2164 2165 2166 2167 2168 2169 216A 216B 216C 216D 216E 216F 2170 2171 2172 2325 2326 2327 2328 2329 232A 232B 232C 232D 232E 232F 2330 2331 2332 2333 2334 2335 2336 2337 2340 2341 2344 2345 2346 2347 2348 2349 234A 234B 234C 234D 234E 234F 2350 2351 2352 2353 2354 2355 2356 2357 2360 2361 2364 2365 2366 2367 2368 2369 236A 236B 236C 236D 236E 236F 2370 2371 2372 2525 2526 2527 2528 2529 252A 252B 252C 252D 252E 252F 2530 2531 2532 2533 2534 2535 2536 2537 2540 2541 2544 2545 2546 2547 2548 2549 254A 254B 254C 254D 254E 254F 2550 2551 2552 2553 2554 2555 2556 2557 2560 2561 2564 2565 2566 2567 2568 2569 256A 256B 256C 256D 256E 256F 2570 2571 2572 2725 2726 2727 2728 2729 272A 272B 272C 272D 272E 272F 2730 2731 2732 2733 2734 2735 2736 2737 2740 2741 2744 2745 2746 2747 2748 2749 274A 274B 274C 274D 274E 274F 2750 2751 2752 2753 2754 2755 2756 2757 2760 2761 2764 2765 2766 2767 2768 2769 276A 276B 276C 276D 276E 276F 2770 2771 2772 249 Engineering Handbook PROGRAM NUMBER HEXADECIMAL ADDRESS (2.xx) Segment.14.OnTime Segment.14.OffTime Segment.14.PIDSet Segment.14.PVWait Segment.14.WaitVal Segment.15.Type Segment.15.Holdback Segment.15.Duration Segment.15.RampRate Segment.15.TargetSP Segment.15.EndAction Segment.15.EventOutputs Segment.15.WaitFor Segment.15.GobackSeg Segment.15.GobackCycles Segment.15.PVEvent Segment.15.PVThreshold Segment.15.UserVal Segment.15.GsoakType Segment.15.GsoakVal Segment.15.TimeEvent Segment.15.OnTime Segment.15.OffTime Segment.15.PIDSet Segment.15.PVWait Segment.15.WaitVal Segment.16.Type Segment.16.Holdback Segment.16.Duration Segment.16.RampRate Segment.16.TargetSP Segment.16.EndAction Segment.16.EventOutputs Segment.16.WaitFor Segment.16.GobackSeg Segment.16.GobackCycles Segment.16.PVEvent Segment.16.PVThreshold Segment.16.UserVal Segment.16.GsoakType Segment.16.GsoakVal Segment.16.TimeEvent Segment.16.OnTime Segment.16.OffTime Segment.16.PIDSet Segment.16.PVWait Segment.16.WaitVal 250 Mini8 Controller 1 2 3 4 5 6 7 8 1973 1974 1975 1976 1977 1980 1981 1984 1985 1986 1987 1988 1989 198A 198B 198C 198D 198E 198F 1990 1991 1992 1993 1994 1995 1996 1997 19A0 19A1 19A4 19A5 19A6 19A7 19A8 19A9 19AA 19AB 19AC 19AD 19AE 19AF 19B0 19B1 19B2 19B3 19B4 19B5 19B6 19B7 1B73 1B74 1B75 1B76 1B77 1B80 1B81 1B84 1B85 1B86 1B87 1B88 1B89 1B8A 1B8B 1B8C 1B8D 1B8E 1B8F 1B90 1B91 1B92 1B93 1B94 1B95 1B96 1B97 1BA0 1BA1 1BA4 1BA5 1BA6 1BA7 1BA8 1BA9 1BAA 1BAB 1BAC 1BAD 1BAE 1BAF 1BB0 1BB1 1BB2 1BB3 1BB4 1BB5 1BB6 1BB7 1D73 1D74 1D75 1D76 1D77 1D80 1D81 1D84 1D85 1D86 1D87 1D88 1D89 1D8A 1D8B 1D8C 1D8D 1D8E 1D8F 1D90 1D91 1D92 1D93 1D94 1D95 1D96 1D97 1DA0 1DA1 1DA4 1DA5 1DA6 1DA7 1DA8 1DA9 1DAA 1DAB 1DAC 1DAD 1DAE 1DAF 1DB0 1DB1 1DB2 1DB3 1DB4 1DB5 1DB6 1DB7 1F73 1F74 1F75 1F76 1F77 1F80 1F81 1F84 1F85 1F86 1F87 1F88 1F89 1F8A 1F8B 1F8C 1F8D 1F8E 1F8F 1F90 1F91 1F92 1F93 1F94 1F95 1F96 1F97 1FA0 1FA1 1FA4 1FA5 1FA6 1FA7 1FA8 1FA9 1FAA 1FAB 1FAC 1FAD 1FAE 1FAF 1FB0 1FB1 1FB2 1FB3 1FB4 1FB5 1FB6 1FB7 2173 2174 2175 2176 2177 2180 2181 2184 2185 2186 2187 2188 2189 218A 218B 218C 218D 218E 218F 2190 2191 2192 2193 2194 2195 2196 2197 21A0 21A1 21A4 21A5 21A6 21A7 21A8 21A9 21AA 21AB 21AC 21AD 21AE 21AF 21B0 21B1 21B2 21B3 21B4 21B5 21B6 21B7 2373 2374 2375 2376 2377 2380 2381 2384 2385 2386 2387 2388 2389 238A 238B 238C 238D 238E 238F 2390 2391 2392 2393 2394 2395 2396 2397 23A0 23A1 23A4 23A5 23A6 23A7 23A8 23A9 23AA 23AB 23AC 23AD 23AE 23AF 23B0 23B1 23B2 23B3 23B4 23B5 23B6 23B7 2573 2574 2575 2576 2577 2580 2581 2584 2585 2586 2587 2588 2589 258A 258B 258C 258D 258E 258F 2590 2591 2592 2593 2594 2595 2596 2597 25A0 25A1 25A4 25A5 25A6 25A7 25A8 25A9 25AA 25AB 25AC 25AD 25AE 25AF 25B0 25B1 25B2 25B3 25B4 25B5 25B6 25B7 2773 2774 2775 2776 2777 2780 2781 2784 2785 2786 2787 2788 2789 278A 278B 278C 278D 278E 278F 2790 2791 2792 2793 2794 2795 2796 2797 27A0 27A1 27A4 27A5 27A6 27A7 27A8 27A9 27AA 27AB 27AC 27AD 27AE 27AF 27B0 27B1 27B2 27B3 27B4 27B5 27B6 27B7 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 24. Engineering Handbook APPENDIX B DEVICENET PARAMETER TABLES 24.1 IO Re-Mapping Object DeviceNet comes pre-configured with the key parameters of 8 PID loops and alarms (60 input parameters process variables, alarm status etc and 60 output parameters – setpoints etc.). Loops 9-16 are not included in the DeviceNet tables as there are insufficient attributes for the DeviceNet parameters The Mini8 DeviceNet communicates is supplied with a default input assembly table (80 bytes) and output assembly table (48 bytes). The parameters included are listed below. To modify these tables see the next section. The default Input assembly table Input Parameter PV – Loop 1 Working SP – Loop 1 Working Output – Loop 1 PV – Loop 2 Working SP – Loop 2 Working Output – Loop 2 PV – Loop 3 Working SP – Loop 3 Working Output – Loop 3 PV – Loop 4 Working SP – Loop 4 Working Output – Loop 4 PV – Loop 5 Working SP – Loop 5 Working Output – Loop 5 PV – Loop 6 Working SP – Loop 6 Working Output – Loop 6 PV – Loop 7 Working SP – Loop 7 Working Output – Loop 7 PV – Loop 8 Working SP – Loop 8 Working Output – Loop 8 Analogue Alarm Status 1 Analogue Alarm Status 2 Analogue Alarm Status 3 Analogue Alarm Status 4 Sensor Break Alarm Status 1 Sensor Break Alarm Status 2 Sensor Break Alarm Status 3 Sensor Break Alarm Status 4 CT Alarm Status 1 CT Alarm Status 2 CT Alarm Status 3 CT Alarm Status 4 New Alarm Output Any Alarm Output New CT Alarm Output Program Status TOTAL LENGTH Part No HA028581 Issue 3 Sep-05 Offset Value (Attr ID) 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 52 54 56 58 60 62 64 66 68 70 72 74 76 78 80 0 1 2 14 (0EH) 15 (0FH) 16 (10H) 28 (1CH) 29 (1DH) 30 (1EH) 42 (2AH) 43 (2BH) 44 (2CH) 56 (38H) 57 (39H) 58 (3AH) 70 (46H) 71 (47H) 72 (48H) 84 (54H) 85 (55H) 86 (56H) 98 (62H) 99 (63H) 100 (64H) 144 (90H) 145 (91H) 146 (92H) 147 (93H) 148 (94H) 149 (95H) 150 (96H) 151 (97H) 152 (98H) 153 (99H) 154 (9AH) 155 (9BH) 156 (9CH) 157 (9DH) 158 (9EH) 184 (B8H) 251 Engineering Handbook Mini8 Controller The default output assembly table. Output Parameter Offset Value Target SP – Loop 1 Auto/Manual – Loop 1 Manual Output – Loop 1 Target SP – Loop 2 Auto/Manual – Loop 2 Manual Output – Loop 2 Target SP – Loop 3 Auto/Manual – Loop 3 Manual Output – Loop 3 Target SP – Loop 4 Auto/Manual – Loop 4 Manual Output – Loop 4 Target SP – Loop 5 Auto/Manual – Loop 5 Manual Output – Loop 5 Target SP – Loop 6 Auto/Manual – Loop 6 Manual Output – Loop 6 Target SP – Loop 7 Auto/Manual – Loop 7 Manual Output – Loop 7 Target SP – Loop 8 Auto/Manual – Loop 8 Manual Output – Loop 8 TOTAL LENGTH 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 3 7 4 17 (11H) 21 (15H) 18 (12H) 31 (1FH) 35 (23H) 32 (20H) 45 (2DH) 49 (31H) 46 (2EH) 59 (3BH) 63 (3FH) 60 (3CH) 73 (49H) 77 (4DH) 74 (4AH) 87 (57H) 91 (5BH) 88 (58H) 101 (65H) 105 (69H) 102 (66H) 24.2 Application Variables Object This is the list of parameters available to be included in the input and output tables. Parameter Process Variable – Loop 1 Working Setpoint – Loop 1 Working Output – Loop 1 Target Setpoint – Loop 1 Manual Output – Loop 1 Setpoint 1 – Loop 1 Setpoint 2 – Loop 1 Auto/Manual Mode – Loop 1 Proportional Band – Loop 1 working Set Integral Time – Loop 1 working Set Derivative Time – Loop 1 working Set Cutback Low – Loop 1 working Set Cutback High – Loop 1 working Set Relative Cooling Gain – Loop 1 working Set Process Variable – Loop 2 Working Setpoint – Loop 2 Working Output – Loop 2 Target Setpoint – Loop 2 Manual Output – Loop 2 Setpoint 1 – Loop 2 Setpoint 2 – Loop 2 Auto/Manual Mode – Loop 2 Proportional Band – Loop 2 working Set Integral Time – Loop 2 working Set Derivative Time – Loop 2 working Set Cutback Low – Loop 2 working Set Cutback High – Loop 2 working Set Relative Cooling Gain – Loop 2 working Set Process Variable – Loop 3 Working Setpoint – Loop 3 Working Output – Loop 3 Target Setpoint – Loop 3 Manual Output – Loop 3 Setpoint 1 – Loop 3 Setpoint 2 – Loop 3 Auto/Manual Mode – Loop 3 252 Attribute ID 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Parameter Proportional Band – Loop 3 working Set Integral Time – Loop 3 working Set Derivative Time – Loop 3 working Set Cutback Low – Loop 3 working Set Cutback High – Loop 3 working Set Relative Cooling Gain – Loop 3 working Set Process Variable – Loop 4 Working Setpoint – Loop 4 Working Output – Loop 4 Target Setpoint – Loop 4 Manual Output – Loop 4 Setpoint 1 – Loop 4 Setpoint 2 – Loop 4 Auto/Manual Mode – Loop 4 Proportional Band – Loop 4 working Set Integral Time – Loop 4 working Set Derivative Time – Loop 4 working Set Cutback Low – Loop 4 working Set Cutback High – Loop 4 working Set Relative Cooling Gain – Loop 4 working Set Process Variable – Loop 5 Working Setpoint – Loop 5 Working Output – Loop 5 Target Setpoint – Loop 5 Manual Output – Loop 5 Setpoint 1 – Loop 5 Setpoint 2 – Loop 5 Auto/Manual Mode – Loop 5 Proportional Band – Loop 5 working Set Integral Time – Loop 5 working Set Derivative Time – Loop 5 working Set Cutback Low – Loop 5 working Set Cutback High – Loop 5 working Set Relative Cooling Gain – Loop 5 working Set Process Variable – Loop 6 Working Setpoint – Loop 6 Working Output – Loop 6 Target Setpoint – Loop 6 Manual Output – Loop 6 Setpoint 1 – Loop 6 Setpoint 2 – Loop 6 Auto/Manual Mode – Loop 6 Proportional Band – Loop 6 working Set Integral Time – Loop 6 working Set Derivative Time – Loop 6 working Set Cutback Low – Loop 6 working Set Cutback High – Loop 6 working Set Relative Cooling Gain – Loop 6 working Set Process Variable – Loop 7 Working Setpoint – Loop 7 Working Output – Loop 7 Target Setpoint – Loop 7 Manual Output – Loop 7 Setpoint 1 – Loop 7 Setpoint 2 – Loop 7 Auto/Manual Mode – Loop 7 Proportional Band – Loop 7 working Set Integral Time – Loop 7 working Set Derivative Time – Loop 7 working Set Cutback Low – Loop 7 working Set Cutback High – Loop 7 working Set Relative Cooling Gain – Loop 7 working Set Process Variable – Loop 8 Working Setpoint – Loop 8 Working Output – Loop 8 Target Setpoint – Loop 8 Manual Output – Loop 8 Setpoint 1 – Loop 8 Setpoint 2 – Loop 8 Auto/Manual Mode – Loop 8 Part No HA028581 Issue 3 Sep-05 Attribute ID 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 253 Engineering Handbook Parameter Proportional Band – Loop 8 working Set Integral Time – Loop 8 working Set Derivative Time – Loop 8 working Set Cutback Low – Loop 8 working Set Cutback High – Loop 8 working Set Relative Cooling Gain – Loop 8 working Set Module PV – Channel 1 Module PV – Channel 2 Module PV – Channel 3 Module PV – Channel 4 Module PV – Channel 5 Module PV – Channel 6 Module PV – Channel 7 Module PV – Channel 8 Module PV – Channel 9 Module PV – Channel 10 Module PV – Channel 11 Module PV – Channel 12 Module PV – Channel 13 Module PV – Channel 14 Module PV – Channel 15 Module PV – Channel 16 Module PV – Channel 17 Module PV – Channel 18 Module PV – Channel 19 Module PV – Channel 20 Module PV – Channel 21 Module PV – Channel 22 Module PV – Channel 23 Module PV – Channel 24 Module PV – Channel 25 Module PV – Channel 26 Module PV – Channel 27 Module PV – Channel 28 Module PV – Channel 29 Module PV – Channel 30 Module PV – Channel 31 Module PV – Channel 32 Analogue Alarm Status 1 Analogue Alarm Status 2 Analogue Alarm Status 3 Analogue Alarm Status 4 Sensor Break Alarm Status 1 Sensor Break Alarm Status 2 Sensor Break Alarm Status 3 Sensor Break Alarm Status 4 CT Alarm Status 1 CT Alarm Status 2 CT Alarm Status 3 CT Alarm Status 4 New Alarm Output Any Alarm Output New CT Alarm Output Reset New Alarm Reset New CT Alarm CT Load Current 1 CT Load Current 2 CT Load Current 3 CT Load Current 4 CT Load Current 5 CT Load Current 6 CT Load Current 7 CT Load Current 8 CT Load Status 1 CT Load Status 2 CT Load Status 3 CT Load Status 4 CT Load Status 5 CT Load Status 6 CT Load Status 7 254 Mini8 Controller Attribute ID 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook Parameter CT Load Status 8 PSU Relay 1 Output PSU Relay 2 Output PSU Digital Input 1 PSU Digital Input 2 Program Run Program Hold Program Reset Program Status Current Program Program Time Left Segment Time Left User Value 1 User Value 2 User Value 3 User Value 4 User Value 5 User Value 6 User Value 7 User Value 8 User Value 9 User Value 10 User Value 11 User Value 12 Part No HA028581 Issue 3 Sep-05 Attribute ID 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 255 Engineering Handbook Mini8 Controller 24.2.1 Table Modification Make a list of parameters required in the input and output tables to suit the application. If the parameter is listed in the predefined list then use the attribute number of that parameter. To set up the controller so that the required parameters are available on the network requires setting up the INPUT and OUTPUT data assembly tables with the IDs from the Application Variable Object. Mini8 Application Variable Object Mini8 IO Remapping Object List of available parameters ASSEMBLY TABLE Predefined #0 (MAX 60) USER OUTPUT to USER INPUT ASSEMBLY TABLE (MAX 60) #199 256 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 25. Engineering Handbook APPENDIX C CANopen PARAMETER TABLES 25.1 Manufacturer Object – Pick List Object Index 2000h Sub Index Parameter Data Type Receive PDO1 Note: Sub indices 02h – 04h are letter boxed via sub index 01h. 01h Loop Number (Comms.InstNum1) Integer16 02h Loop.n.Main.TargetSP Integer16 03h Loop.n.Main.AutoMan Integer16 04h Loop.n.OP.ManualOutVal Integer16 Receive PDO2 Note: Sub indices 06h – 08h are letter boxed via sub index 05h. 05h Loop Number (Comms.InstNum2) Integer16 06h Loop.n.PID.ProportionalBand Integer16 07h Loop.n.PID.IntegralTime Integer16 08h Loop.n.PID.DerivativeTime Integer16 Receive PDO3 Note: Sub indices 0Ah – 0Ch are letter boxed via sub index 09h. 09h Loop Number (Comms.InstNum3) Integer16 0Ah Loop.n.SP.SP1 Integer16 0Bh Loop.n.SP.SP2 Integer16 0Ch Loop.n.SP.SPSelect Integer16 Receive PDO Note: Sub indices 0Eh – 10h are letter boxed via sub index 0Dh. 0Dh Programmer Number (Comms.InstNum4) Integer16 0Eh Programmer.n.SetUp.ProgRun Integer16 0Fh Programmer.n.SetUp.ProgHold Integer16 10h Programmer.n.SetUp.ProgReset Integer16 Tramsmit PDO1 11h AlmSummary.General.AnAlarmStatus1 Integer16 12h AlmSummary.General.AnAlarmStatus2 Integer16 13h AlmSummary.General.AnAlarmStatus3 Integer16 14h AlmSummary.General.AnAlarmStatus4 Integer16 Transmit PD02 15h AlmSummary.General.SbrkAlarmStatus1 Integer16 16h AlmSummary.General.SbrkAlarmStatus2 Integer16 17h AlmSummary.General.SbrkAlarmStatus3 Integer16 18h AlmSummary.General.SbrkAlarmStatus4 Integer16 Transmit PDO3 Note: Sub indices 1Ah – 1Ch are letter boxed via sub index 19h. 19h Loop Number (Comms.InstNum5) Integer16 1Ah Loop.n.Main.PV Integer16 1Bh Loop.n.Main.WorkingSP Integer16 1Ch Loop.n.Main.ActiveOut Integer16 Transmit PDO4 Note: Sub indices 1Eh – 20h are letter boxed via sub index 1Dh. 1Dh Programmer Number (Comms.InstNum6) Integer16 1Eh Programmer.n.Run.CurProg Integer16 1Fh Programmer.n.Run.ProgStatus Integer16 20h Programmer.n.Run.ProgTimeLeft Integer16 21h Loop.1.Main.PV Integer16 22h Loop.2.Main.PV Integer16 23h Loop.3.Main.PV Integer16 24h Loop.4.Main.PV Integer16 25h Loop.5.Main.PV Integer16 26h Loop.6.Main.PV Integer16 27h Loop.7.Main.PV Integer16 28h Loop.8.Main.PV Integer16 29h Loop.9.Main.PV Integer16 2Ah Loop.10.Main.PV Integer16 Part No HA028581 Issue 3 Sep-05 SCADA Address 15816 15817 15818 15819 15820 15821 15822 15823 15824 15825 15826 15827 15828 15829 15830 15831 15832 15833 15834 15835 15836 15837 15838 15839 15840 15841 15842 15843 15844 15845 15846 15847 15848 15849 15850 15851 15852 15853 15854 15855 15856 15857 257 Engineering Handbook Object Index 2000h 258 Mini8 Controller Sub Index Parameter Data Type SCADA Address 2Bh 2Ch 2Dh 2Eh 2Fh 30h 31h 32h 33h 34h 35h 36h 37h 38h 39h 3Ah 3Bh 3Ch 3Dh 3Eh 3Fh 40h 41h 42h 43h 44h 45h 46h 47h 48h 49h 4Ah 4Bh 4Ch 4Dh 4Eh 4Fh 50h 51h 52h 53h 54h 55h 56h 57h 58h 59h 5Ah 5Bh 5Ch 5Dh 5Eh 5Fh 60h 61h 62h 63h Loop.11.Main.PV Loop.12.Main.PV Loop.13.Main.PV Loop.14.Main.PV Loop.15.Main.PV Loop.16.Main.PV Loop.1.Main.WorkingSP Loop.2.Main.WorkingSP Loop.3.Main.WorkingSP Loop.4.Main.WorkingSP Loop.5.Main.WorkingSP Loop.6.Main.WorkingSP Loop.7.Main.WorkingSP Loop.8.Main.WorkingSP Loop.9.Main.WorkingSP Loop.10.Main.WorkingSP Loop.11.Main.WorkingSP Loop.12.Main.WorkingSP Loop.13.Main.WorkingSP Loop.14.Main.WorkingSP Loop.15.Main.WorkingSP Loop.16.Main.WorkingSP Loop.1.Main.ActiveOut Loop.2.Main.ActiveOut Loop.3.Main.ActiveOut Loop.4.Main.ActiveOut Loop.5.Main.ActiveOut Loop.6.Main.ActiveOut Loop.7.Main.ActiveOut Loop.8.Main.ActiveOut Loop.9.Main.ActiveOut Loop.10.Main.ActiveOut Loop.11.Main.ActiveOut Loop.12.Main.ActiveOut Loop.13.Main.ActiveOut Loop.14.Main.ActiveOut Loop.15.Main.ActiveOut Loop.16.Main.ActiveOut Loop.1.Main.TargetSP Loop.2.Main.TargetSP Loop.3.Main.TargetSP Loop.4.Main.TargetSP Loop.5.Main.TargetSP Loop.6.Main.TargetSP Loop.7.Main.TargetSP Loop.8.Main.TargetSP Loop.9.Main.TargetSP Loop.10.Main.TargetSP Loop.11.Main.TargetSP Loop.12.Main.TargetSP Loop.13.Main.TargetSP Loop.14.Main.TargetSP Loop.15.Main.TargetSP Loop.16.Main.TargetSP Loop.1.OP.ManualOutVal Loop.2.OP.ManualOutVal Loop.3.OP.ManualOutVal Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 15858 15859 15860 15861 15862 15863 15864 15865 15866 15867 15868 15869 15870 15871 15872 15873 15874 15875 15876 15877 15878 15879 15880 15881 15882 15883 15884 15885 15886 15887 15888 15889 15890 15891 15892 15893 15894 15895 15896 15897 15898 15899 15900 15901 15902 15903 15904 15905 15906 15907 15908 15909 15910 15911 15912 15913 15914 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Object Index 2000h Part No HA028581 Engineering Handbook Sub Index Parameter Data Type SCADA Address 64h 65h 66h 67h 68h 69h 6Ah 6Bh 6Ch 6Dh 6Eh 6Fh 70h 71h 72h 73h 74h 75h 76h 77h 78h 79h 7Ah 7Bh 7Ch 7Dh 7Eh 7Fh 80h 81h 82h 83h 84h 85h 86h 87h 88h 89h 8Ah 8Bh 8Ch 8Dh 8Eh 8Fh 90h 91h 92h 93h 94h 95h 96h 97h 98h 99h 9Ah 9Bh 9Ch Loop.4.OP.ManualOutVal Loop.5.OP.ManualOutVal Loop.6.OP.ManualOutVal Loop.7.OP.ManualOutVal Loop.8.OP.ManualOutVal Loop.9.OP.ManualOutVal Loop.10.OP.ManualOutVal Loop.11.OP.ManualOutVal Loop.12.OP.ManualOutVal Loop.13.OP.ManualOutVal Loop.14.OP.ManualOutVal Loop.15.OP.ManualOutVal Loop.16.OP.ManualOutVal Loop.1.Main.AutoMan Loop.2.Main.AutoMan Loop.3.Main.AutoMan Loop.4.Main.AutoMan Loop.5.Main.AutoMan Loop.6.Main.AutoMan Loop.7.Main.AutoMan Loop.8.Main.AutoMan Loop.9.Main.AutoMan Loop.10.Main.AutoMan Loop.11.Main.AutoMan Loop.12.Main.AutoMan Loop.13.Main.AutoMan Loop.14.Main.AutoMan Loop.15.Main.AutoMan Loop.16.Main.AutoMan IO.Mod.1.PV IO.Mod.2.PV IO.Mod.3.PV IO.Mod.4.PV IO.Mod.5.PV IO.Mod.6.PV IO.Mod.7.PV IO.Mod.8.PV IO.Mod.9.PV IO.Mod.10.PV IO.Mod.11.PV IO.Mod.12.PV IO.Mod.13.PV IO.Mod.14.PV IO.Mod.15.PV IO.Mod.16.PV IO.Mod.17.PV IO.Mod.18.PV IO.Mod.19.PV IO.Mod.20.PV IO.Mod.21.PV IO.Mod.22.PV IO.Mod.23.PV IO.Mod.24.PV IO.Mod.25.PV IO.Mod.26.PV IO.Mod.27.PV IO.Mod.28.PV Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 15915 15916 15917 15918 15919 15920 15921 15922 15923 15924 15925 15926 15927 15928 15929 15930 15931 15932 15933 15934 15935 15936 15937 15938 15939 15940 15941 15942 15943 15944 15945 15946 15947 15948 15949 15950 15951 15952 15953 15954 15955 15956 15957 15958 15959 15960 15961 15962 15963 15964 15965 15966 15967 15968 15969 15970 15971 Issue 3 Sep-05 259 Engineering Handbook Object Index 2000h 260 Mini8 Controller Sub Index Parameter Data Type SCADA Address 9Dh 9Eh 9Fh A0h A1h A2h A3h A4h A5h A6h A7h A8h A9h AAh ABh ACh ADh AEh AFh B0h B1h B2h B3h B4h B5h B6h B7h B8h B9h BAh BBh BCh BDh BEh BFh C0h C1h C2h C3h C4h C5h C6h C7h C8h IO.Mod.29.PV IO.Mod.30.PV IO.Mod.31.PV IO.Mod.32.PV IO.FixedIO.A.PV IO.FixedIO.B.PV IO.FixedIO.D1.PV IO.FixedIO.D2.PV IO.CurrentMonitor.Status.Load1Current IO.CurrentMonitor.Status.Load2Current IO.CurrentMonitor.Status.Load3Current IO.CurrentMonitor.Status.Load4Current IO.CurrentMonitor.Status.Load5Current IO.CurrentMonitor.Status.Load6Current IO.CurrentMonitor.Status.Load7Current IO.CurrentMonitor.Status.Load8Current IO.CurrentMonitor.Status.Load1Status IO.CurrentMonitor.Status.Load2Status IO.CurrentMonitor.Status.Load3Status IO.CurrentMonitor.Status.Load4Status IO.CurrentMonitor.Status.Load5Status IO.CurrentMonitor.Status.Load6Status IO.CurrentMonitor.Status.Load7Status IO.CurrentMonitor.Status.Load8Status AlmSummary.General.AnyAlarm AlmSummary.General.NewAlarm AlmSummary.General.NewCTAlarm AlmSummary.General.RstNewAlarm AlmSummary.General.RstNewCTAlarm AlmSummary.General.CTAlarmStatus1 AlmSummary.General.CTAlarmStatus2 AlmSummary.General.CTAlarmStatus3 AlmSummary.General.CTAlarmStatus4 AlmSummary.General.DigAlarmStatus1 AlmSummary.General.DigAlarmStatus2 AlmSummary.General.DigAlarmStatus3 AlmSummary.General.DigAlarmStatus4 AlmSummary.General.GlobalAck UserVal.1.Val UserVal.2.Val UserVal.3.Val UserVal.4.Val UserVal.5.Val UserVal.6.Val Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 Integer16 15972 15973 15974 15975 15976 15977 15978 15979 15980 15981 15982 15983 15984 15985 15986 15987 15988 15989 15990 15991 15992 15993 15994 15995 15996 15997 15998 15999 16000 16001 16002 16003 16004 16005 16006 16007 16008 16009 16010 16011 16012 16013 16014 16015 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 26. APPENDIX D VERSION 1.XX PROGRAMMER 26.1 Version 1.xx Parameter Tables 26.1.1 Configuring the Programmer (V1.xx) Programmer.1.Setup contains the general configuration settings for the Programmer Block. Programs are created and stored in the Program Folder. Once a Program exists it can be run using the parameters in the Programmer.1.Run folder. Folder – Programmer.1 Sub-folder: Setup Name Parameter Description Value Units Units of the Output Resolution Programmer Output resolution X to X.XXXX Conf PVIn The programmer uses the PV input for a number of functions In holdback, the PV is monitored against the setpoint, and if a deviation occurs the program is paused. The programmer can be configured to start its profile from the current PV value (servo to PV). The programmer monitors the PV value for Sensor Break. The programmer holds in sensor break. Conf SPIn The programmer needs to know the working setpoint of the loop it is profiling. The SP input is used in the servo to setpoint start type. The transfer of program setpoint to PV Input (normally the Loop PV) or the SP Input (normally the Loop setpoint). Power fail recovery strategy The PV Input is normally wired from the loop TrackPV parameter. Note: This input is automatically wired when the programmer and loop are enabled and there are no existing wires to track interface parameters. Track interface parameters are Programmer.Setup, PVInput, SPInput, Loop.SP, AltSP, Loop.SP, AltSPSelect. SP Input is normally wired from the loop Track SP parameter as the PV input. PV See also section SP 18.7.1 Servo PowerFailAct SyncIn Ramp Reset Cont 0 1 Default Access Level None Conf Conf Conf See section 18.8. Conf This will normally be wired to the ‘End of Seg’ parameter. Oper Prog Reset The synchronise input is a way of synchronising programs. At the end of a segment the programmer will inspect the sync. input, if it is True (1) then the programmer will advance to the next segment. It is typically wired from the end of segment output of another programmer. Only appears if ‘SyncMode’ = ‘Yes’ To set the maximum number of output events required for the program. This is for convenience to avoid having to scroll through unwanted events when setting up each segment Allows multiple controllers to be synchronised at the end of each segment Flag showing reset state Prog Run Flag showing run state No/Yes Prog Hold Flag showing hold state No/Yes AdvSeg No/Yes Oper No/Yes Oper EventOut1 to 8 Set output to target setpoint and advance to next segment Skip to the next setpoint and start the segment at the current output value. Flags showing event states No/Yes R/O End of Seg Flag showing end of segment state No/Yes R/O Max Events SyncMode SkipSeg Part No HA028581 Issue 3 Sep-05 1 to 8 No Yes No/Yes Conf Sync output disabled Sync output enabled Can be wired to logic inputs to provide remote program control Conf Oper Oper Oper 261 Engineering Handbook Mini8 Controller 26.1.2 To Select, Run, Hold or Reset a Program (V1.xx). The ‘Run’ folder allows an existing program to be selected and run. The folder also shows the current program status Folder – Programmer.1 Sub-folder: Run Name Parameter Description Value Default Access Level CurProg Current Program Number 0 to 50. Change only when Programmer is in Reset. 0 Oper 1 R/O CurrSeg Current Running Segment 1 to 255 ProgStatus Program Status Reset – Run – Hold – Holdback – End – PSP Programmer Setpoint 0 R/O CyclesLeft Number of Cycles Remaining 0 to 1000 0 R/O CurSegType Current Segment type End R/O SegTimeLeft Segment Time Remaining End Rate Time Dwell Step Call Hr Min Sec Millisec 0 R/O ResetEventOP Reset Event Outputs 0 to 255, each bit resets its corresponding output 0 Oper SegTarget Current Target Setpoint Value SegRate Segment Ramp Rate 0.1 to 9999.9 0 R/O ProgTimeLeft Program Time Remaining Hrs Min Sec Millisec 0 R/O FastRun Fast Run No Conf EndOutput End Output Off R/O EventsOut Event Outputs No (0) Normal Yes (1) Program executes at 10 times real time Off (0) Program not in End On (1) Program at End 0 to 255, each bit represents an output. 0 R/O 26.1.3 R/O Oper R/O Creating a Program (V1.xx) A folder exists for each Program containing a few key parameters listed below. This folder would normally be viewed via the iTools Program Editor under the Program Parameters tab. The Program Editor is used to create the segments of Program itself using the Segment Editor tab. Folder – Program Sub-folder: 1 to 50 Name Parameter Description Value Default Access Level Name Program Name Up to 8 characters Null Oper Holdback Value Minimum setting 0 0 Oper Ramp Units Deviation between SP and PV at which holdback is applied. This value applies to the whole program. Time units applied to the segments sec Oper Cycles Number of times the whole program repeats Sec Min Hour Cont (0) 1 to 999 1 Oper 262 Seconds Minutes Hours Repeats continuously Program executes once to 999 times Part No HA028581 Issue 3 Sep-05 Mini8 Controller 26.1.4 Engineering Handbook To Select, Run, Hold or Reset a Program (Version 1.xx) The ‘Run’ folder allows an existing program to be selected and run. The folder also shows the current program status Folder – Programmer.1 Sub-folder: Run Name Parameter Description Value Default Access Level CurProg Current Program Number 0 to 50. Change only when Programmer is in Reset. 0 Oper CurrSeg Current Running Segment 1 to 255 1 ProgStatus Program Status Reset – Run – Hold – Holdback – End – PSP Programmer Setpoint CyclesLeft Number of Cycles Remaining CurSegType Current Segment type SegTimeLeft Segment Time Remaining ResetEventOP Reset Event Outputs SegTarget Current Target Setpoint Value SegRate Segment Ramp Rate 0.1 to 9999.9 0 R/O ProgTimeLeft Program Time Remaining Hrs Min Sec Millisec 0 R/O FastRun Fast Run No Conf EndOutput End Output Off R/O EventsOut Event Outputs No (0) Normal Yes (1) Program executes at 10 times real time Off (0) Program not in End On (1) Program at End 0 to 255, each bit represents an output. 0 R/O R/O R/O Oper 0 R/O 0 to 1000 0 R/O End Rate Time Dwell Step Call Hr Min Sec Millisec End R/O 0 R/O 0 to 255, each bit resets its corresponding output 0 Oper R/O 26.2 Version 1.xx Programmer SCADA addresses Version 1.xx Programmer Parameters Program.Cycles Program.DwellUnits Program.HoldbackVal Program.RampUnits Programmer.CommsProgNum Programmer.Run.CurProg Programmer.Run.CurSeg Programmer.Run.CurSegType Programmer.Run.CyclesLeft Programmer.Run.EventOuts Programmer.Run.FastRun Part No HA028581 Issue 3 Sep-05 DEC 8196 8195 8193 8194 8192 8201 8202 8206 8205 8212 8216 HEX 2004 2003 2001 2002 2000 2009 200A 200E 200D 2014 2018 Version 1.xx Programmer Parameters Programmer.Run.ProgStatus Programmer.Run.ProgTimeLeft Programmer.Run.PSP Programmer.Run.ResetEventOuts Programmer.Run.SegRate Programmer.Run.SegTarget Programmer.Run.SegTimeLeft Programmer.Setup.AdvSeg Programmer.Setup.EndOfSeg Programmer.Setup.PowerFailAct Programmer.Setup.PVIn DEC 8203 8209 8204 8200 8208 8207 8213 8217 8214 8197 8210 263 HEX 200B 2011 200C 2008 2010 200F 2015 2019 2016 2005 2012 Engineering Handbook Version 1.xx Programmer Parameters Programmer.Setup.Servo Programmer.Setup.SkipSeg Programmer.Setup.SPIn Programmer.Setup.SyncIn Programmer.Setup.SyncMode Recipe.LastDataset Recipe.LoadingStatus Recipe.RecipeSelect Segment.1.CallCycles Segment.1.CallProg Segment.1.Duration Segment.1.EndType Segment.1.EventOuts Segment.1.Holdback Segment.1.RampRate Segment.1.SegType Segment.1.TargetSP Segment.2.CallCycles Segment.2.CallProg Segment.2.Duration Segment.2.EndType Segment.2.EventOuts Segment.2.Holdback Segment.2.RampRate Segment.2.SegType Segment.2.TargetSP Segment.3.CallCycles Segment.3.CallProg Segment.3.Duration Segment.3.EndType Segment.3.EventOuts Segment.3.Holdback Segment.3.RampRate Segment.3.SegType Segment.3.TargetSP Segment.4.CallCycles Segment.4.CallProg Segment.4.Duration Segment.4.EndType Segment.4.EventOuts Segment.4.Holdback Segment.4.RampRate Segment.4.SegType Segment.4.TargetSP Segment.5.CallCycles Segment.5.CallProg Segment.5.Duration Segment.5.EndType Segment.5.EventOuts Segment.5.Holdback Segment.5.RampRate Segment.5.SegType Segment.5.TargetSP Segment.6.CallCycles Segment.6.CallProg Segment.6.Duration Segment.6.EndType Segment.6.EventOuts Segment.6.Holdback Segment.6.RampRate 264 Mini8 Controller DEC 8198 8218 8211 8215 8199 4913 4914 4912 8259 8258 8260 8263 8264 8257 8261 8256 8262 8275 8274 8276 8279 8280 8273 8277 8272 8278 8291 8290 8292 8295 8296 8289 8293 8288 8294 8307 8306 8308 8311 8312 8305 8309 8304 8310 8323 8322 8324 8327 8328 8321 8325 8320 8326 8339 8338 8340 8343 8344 8337 8341 HEX 2006 201A 2013 2017 2007 1331 1332 1330 2043 2042 2044 2047 2048 2041 2045 2040 2046 2053 2052 2054 2057 2058 2051 2055 2050 2056 2063 2062 2064 2067 2068 2061 2065 2060 2066 2073 2072 2074 2077 2078 2071 2075 2070 2076 2083 2082 2084 2087 2088 2081 2085 2080 2086 2093 2092 2094 2097 2098 2091 2095 Version 1.xx Programmer Parameters Segment.6.SegType Segment.6.TargetSP Segment.7.CallCycles Segment.7.CallProg Segment.7.Duration Segment.7.EndType Segment.7.EventOuts Segment.7.Holdback Segment.7.RampRate Segment.7.SegType Segment.7.TargetSP Segment.8.CallCycles Segment.8.CallProg Segment.8.Duration Segment.8.EndType Segment.8.EventOuts Segment.8.Holdback Segment.8.RampRate Segment.8.SegType Segment.8.TargetSP Segment.9.CallCycles Segment.9.CallProg Segment.9.Duration Segment.9.EndType Segment.9.EventOuts Segment.9.Holdback Segment.9.RampRate Segment.9.SegType Segment.9.TargetSP Segment.10.CallCycles Segment.10.CallProg Segment.10.Duration Segment.10.EndType Segment.10.EventOuts Segment.10.Holdback Segment.10.RampRate Segment.10.SegType Segment.10.TargetSP Segment.11.CallCycles Segment.11.CallProg Segment.11.Duration Segment.11.EndType Segment.11.EventOuts Segment.11.Holdback Segment.11.RampRate Segment.11.SegType Segment.11.TargetSP Segment.12.CallCycles Segment.12.CallProg Segment.12.Duration Segment.12.EndType Segment.12.EventOuts Segment.12.Holdback Segment.12.RampRate Segment.12.SegType Segment.12.TargetSP Segment.13.CallCycles Segment.13.CallProg Segment.13.Duration Segment.13.EndType Part No HA028581 Issue 3 DEC 8336 8342 8355 8354 8356 8359 8360 8353 8357 8352 8358 8371 8370 8372 8375 8376 8369 8373 8368 8374 8387 8386 8388 8391 8392 8385 8389 8384 8390 8403 8402 8404 8407 8408 8401 8405 8400 8406 8419 8418 8420 8423 8424 8417 8421 8416 8422 8435 8434 8436 8439 8440 8433 8437 8432 8438 8451 8450 8452 8455 Sep-05 HEX 2090 2096 20A3 20A2 20A4 20A7 20A8 20A1 20A5 20A0 20A6 20B3 20B2 20B4 20B7 20B8 20B1 20B5 20B0 20B6 20C3 20C2 20C4 20C7 20C8 20C1 20C5 20C0 20C6 20D3 20D2 20D4 20D7 20D8 20D1 20D5 20D0 20D6 20E3 20E2 20E4 20E7 20E8 20E1 20E5 20E0 20E6 20F3 20F2 20F4 20F7 20F8 20F1 20F5 20F0 20F6 2103 2102 2104 2107 Mini8 Controller Engineering Handbook Version 1.xx Programmer Parameters Segment.13.EventOuts Segment.13.Holdback Segment.13.RampRate Segment.13.SegType Segment.13.TargetSP Segment.14.CallCycles Segment.14.CallProg Segment.14.Duration Segment.14.EndType Segment.14.EventOuts Segment.14.Holdback Segment.14.RampRate Segment.14.SegType Segment.14.TargetSP Segment.15.CallCycles Segment.15.CallProg Segment.15.Duration Segment.15.EndType Segment.15.EventOuts Segment.15.Holdback Segment.15.RampRate Segment.15.SegType Segment.15.TargetSP Segment.16.CallCycles Segment.16.CallProg Segment.16.Duration Segment.16.EndType Segment.16.EventOuts Segment.16.Holdback Segment.16.RampRate Segment.16.SegType Segment.16.TargetSP Segment.17.CallCycles Segment.17.CallProg Segment.17.Duration Segment.17.EndType Segment.17.EventOuts Segment.17.Holdback Segment.17.RampRate Segment.17.SegType Segment.17.TargetSP Segment.18.CallCycles Segment.18.CallProg Segment.18.Duration Segment.18.EndType Segment.18.EventOuts Segment.18.Holdback Segment.18.RampRate Segment.18.SegType Segment.18.TargetSP Segment.19.CallCycles Segment.19.CallProg Segment.19.Duration Segment.19.EndType Segment.19.EventOuts Segment.19.Holdback Segment.19.RampRate Segment.19.SegType Segment.19.TargetSP Segment.20.CallCycles Part No HA028581 Issue 3 Sep-05 DEC 8456 8449 8453 8448 8454 8467 8466 8468 8471 8472 8465 8469 8464 8470 8483 8482 8484 8487 8488 8481 8485 8480 8486 8499 8498 8500 8503 8504 8497 8501 8496 8502 8515 8514 8516 8519 8520 8513 8517 8512 8518 8531 8530 8532 8535 8536 8529 8533 8528 8534 8547 8546 8548 8551 8552 8545 8549 8544 8550 8563 HEX 2108 2101 2105 2100 2106 2113 2112 2114 2117 2118 2111 2115 2110 2116 2123 2122 2124 2127 2128 2121 2125 2120 2126 2133 2132 2134 2137 2138 2131 2135 2130 2136 2143 2142 2144 2147 2148 2141 2145 2140 2146 2153 2152 2154 2157 2158 2151 2155 2150 2156 2163 2162 2164 2167 2168 2161 2165 2160 2166 2173 Version 1.xx Programmer Parameters Segment.20.CallProg Segment.20.Duration Segment.20.EndType Segment.20.EventOuts Segment.20.Holdback Segment.20.RampRate Segment.20.SegType Segment.20.TargetSP Segment.21.CallCycles Segment.21.CallProg Segment.21.Duration Segment.21.EndType Segment.21.EventOuts Segment.21.Holdback Segment.21.RampRate Segment.21.SegType Segment.21.TargetSP Segment.22.CallCycles Segment.22.CallProg Segment.22.Duration Segment.22.EndType Segment.22.EventOuts Segment.22.Holdback Segment.22.RampRate Segment.22.SegType Segment.22.TargetSP Segment.23.CallCycles Segment.23.CallProg Segment.23.Duration Segment.23.EndType Segment.23.EventOuts Segment.23.Holdback Segment.23.RampRate Segment.23.SegType Segment.23.TargetSP Segment.24.CallCycles Segment.24.CallProg Segment.24.Duration Segment.24.EndType Segment.24.EventOuts Segment.24.Holdback Segment.24.RampRate Segment.24.SegType Segment.24.TargetSP Segment.25.CallCycles Segment.25.CallProg Segment.25.Duration Segment.25.EndType Segment.25.EventOuts Segment.25.Holdback Segment.25.RampRate Segment.25.SegType Segment.25.TargetSP Segment.26.CallCycles Segment.26.CallProg Segment.26.Duration Segment.26.EndType Segment.26.EventOuts Segment.26.Holdback Segment.26.RampRate DEC 8562 8564 8567 8568 8561 8565 8560 8566 8579 8578 8580 8583 8584 8577 8581 8576 8582 8595 8594 8596 8599 8600 8593 8597 8592 8598 8611 8610 8612 8615 8616 8609 8613 8608 8614 8627 8626 8628 8631 8632 8625 8629 8624 8630 8643 8642 8644 8647 8648 8641 8645 8640 8646 8659 8658 8660 8663 8664 8657 8661 265 HEX 2172 2174 2177 2178 2171 2175 2170 2176 2183 2182 2184 2187 2188 2181 2185 2180 2186 2193 2192 2194 2197 2198 2191 2195 2190 2196 21A3 21A2 21A4 21A7 21A8 21A1 21A5 21A0 21A6 21B3 21B2 21B4 21B7 21B8 21B1 21B5 21B0 21B6 21C3 21C2 21C4 21C7 21C8 21C1 21C5 21C0 21C6 21D3 21D2 21D4 21D7 21D8 21D1 21D5 Engineering Handbook Version 1.xx Programmer Parameters Segment.26.SegType Segment.26.TargetSP Segment.27.CallCycles Segment.27.CallProg Segment.27.Duration Segment.27.EndType Segment.27.EventOuts Segment.27.Holdback Segment.27.RampRate Segment.27.SegType Segment.27.TargetSP Segment.28.CallCycles Segment.28.CallProg Segment.28.Duration Segment.28.EndType Segment.28.EventOuts Segment.28.Holdback Segment.28.RampRate Segment.28.SegType Segment.28.TargetSP Segment.29.CallCycles Segment.29.CallProg Segment.29.Duration Segment.29.EndType Segment.29.EventOuts Segment.29.Holdback Segment.29.RampRate Segment.29.SegType Segment.29.TargetSP Segment.30.CallCycles Segment.30.CallProg Segment.30.Duration Segment.30.EndType Segment.30.EventOuts Segment.30.Holdback Segment.30.RampRate Segment.30.SegType Segment.30.TargetSP Segment.31.CallCycles Segment.31.CallProg Segment.31.Duration Segment.31.EndType Segment.31.EventOuts Segment.31.Holdback Segment.31.RampRate Segment.31.SegType Segment.31.TargetSP Segment.32.CallCycles Segment.32.CallProg Segment.32.Duration Segment.32.EndType Segment.32.EventOuts Segment.32.Holdback Segment.32.RampRate Segment.32.SegType Segment.32.TargetSP Segment.33.CallCycles Segment.33.CallProg Segment.33.Duration Segment.33.EndType 266 Mini8 Controller DEC 8656 8662 8675 8674 8676 8679 8680 8673 8677 8672 8678 8691 8690 8692 8695 8696 8689 8693 8688 8694 8707 8706 8708 8711 8712 8705 8709 8704 8710 8723 8722 8724 8727 8728 8721 8725 8720 8726 8739 8738 8740 8743 8744 8737 8741 8736 8742 8755 8754 8756 8759 8760 8753 8757 8752 8758 8771 8770 8772 8775 HEX 21D0 21D6 21E3 21E2 21E4 21E7 21E8 21E1 21E5 21E0 21E6 21F3 21F2 21F4 21F7 21F8 21F1 21F5 21F0 21F6 2203 2202 2204 2207 2208 2201 2205 2200 2206 2213 2212 2214 2217 2218 2211 2215 2210 2216 2223 2222 2224 2227 2228 2221 2225 2220 2226 2233 2232 2234 2237 2238 2231 2235 2230 2236 2243 2242 2244 2247 Version 1.xx Programmer Parameters Segment.33.EventOuts Segment.33.Holdback Segment.33.RampRate Segment.33.SegType Segment.33.TargetSP Segment.34.CallCycles Segment.34.CallProg Segment.34.Duration Segment.34.EndType Segment.34.EventOuts Segment.34.Holdback Segment.34.RampRate Segment.34.SegType Segment.34.TargetSP Segment.35.CallCycles Segment.35.CallProg Segment.35.Duration Segment.35.EndType Segment.35.EventOuts Segment.35.Holdback Segment.35.RampRate Segment.35.SegType Segment.35.TargetSP Segment.36.CallCycles Segment.36.CallProg Segment.36.Duration Segment.36.EndType Segment.36.EventOuts Segment.36.Holdback Segment.36.RampRate Segment.36.SegType Segment.36.TargetSP Segment.37.CallCycles Segment.37.CallProg Segment.37.Duration Segment.37.EndType Segment.37.EventOuts Segment.37.Holdback Segment.37.RampRate Segment.37.SegType Segment.37.TargetSP Segment.38.CallCycles Segment.38.CallProg Segment.38.Duration Segment.38.EndType Segment.38.EventOuts Segment.38.Holdback Segment.38.RampRate Segment.38.SegType Segment.38.TargetSP Segment.39.CallCycles Segment.39.CallProg Segment.39.Duration Segment.39.EndType Segment.39.EventOuts Segment.39.Holdback Segment.39.RampRate Segment.39.SegType Segment.39.TargetSP Segment.40.CallCycles Part No HA028581 Issue 3 DEC 8776 8769 8773 8768 8774 8787 8786 8788 8791 8792 8785 8789 8784 8790 8803 8802 8804 8807 8808 8801 8805 8800 8806 8819 8818 8820 8823 8824 8817 8821 8816 8822 8835 8834 8836 8839 8840 8833 8837 8832 8838 8851 8850 8852 8855 8856 8849 8853 8848 8854 8867 8866 8868 8871 8872 8865 8869 8864 8870 8883 Sep-05 HEX 2248 2241 2245 2240 2246 2253 2252 2254 2257 2258 2251 2255 2250 2256 2263 2262 2264 2267 2268 2261 2265 2260 2266 2273 2272 2274 2277 2278 2271 2275 2270 2276 2283 2282 2284 2287 2288 2281 2285 2280 2286 2293 2292 2294 2297 2298 2291 2295 2290 2296 22A3 22A2 22A4 22A7 22A8 22A1 22A5 22A0 22A6 22B3 Mini8 Controller Engineering Handbook Version 1.xx Programmer Parameters Segment.40.CallProg Segment.40.Duration Segment.40.EndType Segment.40.EventOuts Segment.40.Holdback Segment.40.RampRate Segment.40.SegType Segment.40.TargetSP Segment.41.CallCycles Segment.41.CallProg Segment.41.Duration Segment.41.EndType Segment.41.EventOuts Segment.41.Holdback Segment.41.RampRate Segment.41.SegType Segment.41.TargetSP Segment.42.CallCycles Segment.42.CallProg Segment.42.Duration Segment.42.EndType Segment.42.EventOuts Segment.42.Holdback Segment.42.RampRate Segment.42.SegType Segment.42.TargetSP Segment.43.CallCycles Segment.43.CallProg Segment.43.Duration Segment.43.EndType Segment.43.EventOuts Segment.43.Holdback Segment.43.RampRate Segment.43.SegType Segment.43.TargetSP Segment.44.CallCycles Segment.44.CallProg Segment.44.Duration Segment.44.EndType Segment.44.EventOuts Segment.44.Holdback Segment.44.RampRate Segment.44.SegType Segment.44.TargetSP Segment.45.CallCycles Segment.45.CallProg Segment.45.Duration Segment.45.EndType Segment.45.EventOuts Segment.45.Holdback Segment.45.RampRate Segment.45.SegType Segment.45.TargetSP Segment.46.CallCycles Segment.46.CallProg Segment.46.Duration Segment.46.EndType Segment.46.EventOuts Segment.46.Holdback Segment.46.RampRate Part No HA028581 Issue 3 Sep-05 DEC 8882 8884 8887 8888 8881 8885 8880 8886 8899 8898 8900 8903 8904 8897 8901 8896 8902 8915 8914 8916 8919 8920 8913 8917 8912 8918 8931 8930 8932 8935 8936 8929 8933 8928 8934 8947 8946 8948 8951 8952 8945 8949 8944 8950 8963 8962 8964 8967 8968 8961 8965 8960 8966 8979 8978 8980 8983 8984 8977 8981 HEX 22B2 22B4 22B7 22B8 22B1 22B5 22B0 22B6 22C3 22C2 22C4 22C7 22C8 22C1 22C5 22C0 22C6 22D3 22D2 22D4 22D7 22D8 22D1 22D5 22D0 22D6 22E3 22E2 22E4 22E7 22E8 22E1 22E5 22E0 22E6 22F3 22F2 22F4 22F7 22F8 22F1 22F5 22F0 22F6 2303 2302 2304 2307 2308 2301 2305 2300 2306 2313 2312 2314 2317 2318 2311 2315 Version 1.xx Programmer Parameters Segment.46.SegType Segment.46.TargetSP Segment.47.CallCycles Segment.47.CallProg Segment.47.Duration Segment.47.EndType Segment.47.EventOuts Segment.47.Holdback Segment.47.RampRate Segment.47.SegType Segment.47.TargetSP Segment.48.CallCycles Segment.48.CallProg Segment.48.Duration Segment.48.EndType Segment.48.EventOuts Segment.48.Holdback Segment.48.RampRate Segment.48.SegType Segment.48.TargetSP Segment.49.CallCycles Segment.49.CallProg Segment.49.Duration Segment.49.EndType Segment.49.EventOuts Segment.49.Holdback Segment.49.RampRate Segment.49.SegType Segment.49.TargetSP Segment.50.CallCycles Segment.50.CallProg Segment.50.Duration Segment.50.EndType Segment.50.EventOuts Segment.50.Holdback Segment.50.RampRate Segment.50.SegType Segment.50.TargetSP DEC 8976 8982 8995 8994 8996 8999 9000 8993 8997 8992 8998 9011 9010 9012 9015 9016 9009 9013 9008 9014 9027 9026 9028 9031 9032 9025 9029 9024 9030 9043 9042 9044 9047 9048 9041 9045 9040 9046 267 HEX 2310 2316 2323 2322 2324 2327 2328 2321 2325 2320 2326 2333 2332 2334 2337 2338 2331 2335 2330 2336 2343 2342 2344 2347 2348 2341 2345 2340 2346 2353 2352 2354 2357 2358 2351 2355 2350 2356 Engineering Handbook 27. Mini8 Controller APPENDIX E SAFETY AND EMC INFORMATION Eurotherm Controls Ltd manufactures this controller in the UK. Please read this section carefully before installing the controller This controller is intended for industrial temperature and process control applications where it will meet the requirements of the European Directives on Safety and EMC. If the instrument is used in a manner not specified in this manual, the safety or EMC protection provided by the instrument may be impaired. The installer must ensure the safety and EMC of any particular installation. The Mini8 is intended for operation at safe low voltage levels, except the RL8 relay module. Voltages in excess of 42 volts must not be applied to any terminals other than the RL8 relay module. Protective Earth Connection is required. Safety This controller complies with the European Low Voltage Directive 73/23/EEC, by the application of the safety standard EN 61010. The earth stud should be connected to safety earth before other connections are made. Electromagnetic compatibility This controller conforms with the essential protection requirements of the EMC Directive 89/336/EEC, by the application of EMC standard EN61326 Unpacking and storage The packaging should contain an instrument and an Installation guide. It may contain a CD. If on receipt, the packaging or the instrument are damaged, do not install the product but contact your supplier. If the instrument is to be stored before use, protect from humidity and dust in an ambient temperature range of -10oC to +70oC. SERVICE AND REPAIR This controller has no user serviceable parts. Contact your supplier for repair. Cleaning Do not use water or water based products to clean labels or they will become illegible. Isopropyl alcohol may be used to clean labels. A mild soap solution may be used to clean other exterior surfaces of the product. GENERAL The information contained in this manual is subject to change without notice. While every effort has been made to ensure the accuracy of the information, your supplier shall not be held liable for errors contained herein. 268 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook INSTALLATION SAFETY REQUIREMENTS Safety Symbols Various symbols are used on the instrument, they have the following meaning: ! Caution (refer to the accompanying documents Protective Conductor Terminal Personnel Installation must only be carried out by suitably qualified personnel. Mounting The Mini8 should be mounted in a suitable enclosure with suitable ventilation to ensure the ambient temperature remains below 50ºC. Wiring It is important to connect the controller in accordance with the wiring data given in this guide. Take particular care not to connect AC supplies to the low voltage sensor input or other low level inputs and outputs. Only use copper conductors for connections (except thermocouple inputs) and ensure that the wiring of installations comply with all local wiring regulations. For example in the UK use the latest version of the IEE wiring regulations, (BS7671). In the USA use NEC Class 1 wiring methods. Power Isolation The installation must include a power isolating switch or circuit breaker. The device should be mounted in close proximity to the controller, within easy reach of the operator and marked as the disconnecting device for the instrument. Overcurrent protection The power supply to the system should be fused appropriately to protect the cabling to the units. Voltage rating The maximum continuous voltage applied between any of the following terminals must not exceed: • 24 V dc ± 10% on the power supply terminals • 42V peak on analogue and digital I/O terminals, and fixed resource I/O terminals; • 264V rms on Relay card fitted in I/O slot 2 or 3. The case MUST be wired to a protective earth. Conductive pollution Electrically conductive pollution must be excluded from the cabinet in which the controller is mounted. For example, carbon dust is a form of electrically conductive pollution. To secure a suitable atmosphere, install an air filter to the air intake of the cabinet. Where condensation is likely, for example at low temperatures, include a thermostatically controlled heater in the cabinet. This product has been designed to conform to BSEN61010 installation category II, pollution degree 2. These are defined as follows:Installation Category II The rated impulse voltage for equipment on nominal 24V dc supply is 800V. Pollution Degree 2 Normally only non conductive pollution occurs. Occasionally, however, a temporary conductivity caused by condensation shall be expected. Part No HA028581 Issue 3 Sep-05 269 Engineering Handbook Mini8 Controller Over-Temperature Protection When designing any control system it is essential to consider what will happen if any part of the system should fail. In temperature control applications the primary danger is that the heating will remain constantly on. Apart from spoiling the product, this could damage any process machinery being controlled, or even cause a fire. Reasons why the heating might remain constantly on include: • the temperature sensor becoming detached from the process • thermocouple wiring becoming short circuit; • the controller failing with its heating output constantly on • an external valve or contactor sticking in the heating condition • the controller setpoint set too high. Where damage or injury is possible, we recommend fitting a separate over-temperature protection unit, with an independent temperature sensor, which will isolate the heating circuit. Please note that the alarm relays within the controller will not give protection under all failure conditions. INSTALLATION REQUIREMENTS FOR EMC To ensure compliance with the European EMC directive certain installation precautions are necessary as follows: • For general guidance refer to EMC Installation Guide, HA025464. • When using relay outputs it may be necessary to fit a filter suitable for suppressing the conducted emissions. The filter requirements will depend on the type of load. For typical applications we recommend Schaffner FN321 or FN612. • If the unit is used in table top equipment which is plugged into a standard power socket, then it is likely that compliance to the commercial and light industrial emissions standard is required. In this case to meet the conducted emissions requirement, a suitable mains filter should be installed. We recommend Schaffner types FN321 and FN612. Routing of wires To minimise the pick-up of electrical noise, the low voltage DC connections and the sensor input wiring should be routed away from high-current power cables. Where it is impractical to do this, use shielded cables with the shield grounded at both ends. In general keep cable lengths to a minimum. 270 Part No HA028581 Issue 3 Sep-05 Mini8 Controller 28. Engineering Handbook APPENDIX F TECHNICAL SPECIFICATION The I/O electrical specifications are quoted as factory calibrated worst-case; for life, over full ambient temperature range and supply voltage. Any “typical” figures quoted are the expected values at 25°C ambient and 24Vdc supply. The nominal update of all inputs and function blocks is every 110ms. However, in complex applications the Mini8 will automatically extend this time in multiples of 110ms. 28.1 Environmental Specification Power Supply Voltage: 17.8Vdc min to 28.8Vdc max. Supply Ripple: 2Vp-p max. Power Consumption: 15W max. Operating Temperature: 0 to 55°C Storage Temperature: -10°C to +70°C Operating Humidity: 5% to 95% RH non-condensing EMC: EN61326 for Industrial Environments Safety: Meets EN61010, installation category II, pollution degree 2. Max. applied voltage any terminal: 42Vpk. The Mini8 must be mounted in a protective enclosure. 28.2 Network Communications Support Modbus RTU: RS485, 2 x RJ45, user select switch for 3-wire or 5-wire. Baud rates: 4800, 9600, 19200 DeviceNet: CAN, 5-pin standard "open connector" with screw terminals. Baud rates: 125k, 250k, 500k CANopen: CAN, 5-pin standard "open connector" with screw terminals. Baud rates: 125k, 250k, 500k, 1M Profibus DP: RS485 via standard 9 pin D connectopr OR 2 RJ45 connectors Baud rates: Up to 12M set by the Master Ethernet: Standard Ethernet RJ45 connector. Baud rate: 10baseT Modbus /DeviceNet /CANopen /Profibus /Ethernet are mutually exclusive options; refer to the Mini8 order code document. 28.3 Configuration Communications Support Modbus RTU: 3-wire RS232, through RJ11 configuration port. Baud rates: 4800, 9600, 19200 All versions of Mini8 support one configuration port. The configuration port can be used simultaneously with the network link. Part No HA028581 Issue 3 Sep-05 271 Engineering Handbook Mini8 Controller 28.4 Fixed I/O Resources The PSU card supports 2 independent and isolated relay contacts Relay Output Types: On/Off (C/O contacts, "On" closing the N/O pair) Contact Current: <1A (resistive loads) Terminal Voltage: <42Vpk Contact Material: Gold Snubbers: Snubber networks are NOT fitted. Contact Isolation: 42Vpkmax. The PSU card supports 2 independent and isolated logic inputs Input Types: Logic (24Vdc) Input Logic 0 (off): < 5Vdc. Input Logic 1 (on): > 10.8Vdc. Input Operating Range: -30Vdc to +30Vdc. Input Current: 2.5mA (approx.) at 10.5V; 10mA max @ 30V supply. Detectable Pulse Width: 110ms min. Isolation to system: 42Vpkmax. 28.5 TC8 8-Channel and TC4 4-Channel TC Input Card The TC8 supports 8 independently programmable and electrically isolated channels, catering for all standard and custom thermocouple types. The TC4 supports 4 channels to the same specification. 272 Channel Types: TC, mV Input Range: -77mV to +77mV. Resolution: 20 bit ( Σ∆ converter), 1.6µV with 1.6s filter time Temperature Coefficient: < ±50ppm (0.005%) of reading/ °C Cold Junction Range: -10°C to +70°C CJ Rejection: > 30:1 CJ Accuracy: ± 1°C Linearisation Types: C, J, K, L, R, B, N, T, S, LINEAR mV, custom. Total accuracy: ± 1°C ± 0.1% of reading (using internal CJC) Channel PV Filter: 0.0 seconds (off) to 999.9 seconds, 1st order low-pass. Sensor Break: AC detector: Off, Low or High resistance trip levels. Input Resistance : >100 M Input Leakage Current: <100nA (1nA typical). Common mode rejection: >120dB, 47 - 63Hz Series mode rejection: >60dB, 47 - 63Hz Isolation channel-channel: 42Vpkmax Isolation to system: 42Vpkmax Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 28.6 DO8 8-Channel Digital Output Card The DO8 supports 8 independently programmable channels, the output switches requiring external power supply. Each channel is current and temperature protected, foldback limiting occurring at about 100mA. The supply line is protected to limit total card current to 200mA. The 8 channels are isolated from the system (but not from each other). To maintain isolation it is essential to use an independent and isolated PSU. Channel Types: On/Off, Time Proportioned Channel Supply (Vcs): 15Vdc to 30Vdc Logic 1 Voltage Output: > (Vcs - 3V) (not in power limiting) Logic 0 Voltage Output: < 1.2Vdc no-load, 0.9V typical Logic 1 Current Output: 100mA max. (not in power limiting) Min. Pulse Time: 20ms Channel Power Limiting: Current limiting capable of driving short-circuit load Terminal Supply Protection: Card supply is protected by 200mA self-healing fuse Isolation (channel-channel): N/A (Channels share common connections) Isolation to system: 42Vpk max. 28.7 RL8 8-Channel Relay Output Card The RL8 supports 8 independently programmable channels. This module may only be fitted in slot 2 or 3, giving a maximum of 16 relays in a Mini8. The Mini8 chassis must be earthed (grounded) using the protective earth stud. Channel Types: On/Off, Time Proportioned Maximum contact voltage: 264 volt ac Maximum contact current: 2 amps ac Contact snubber: Fitted on module Minimum contact wetting: 5 volt dc, 10mA Min. Pulse Time: 220ms Isolation (channel-channel): 264V Isolation to system: 264V. } 230V nominal 28.8 CT3 3-Channel Current-Transformer Input Card The CT3 supports 3 independent channels designed for heater current monitoring. A scan block allows periodic test of nominated outputs to detect load (failure) changes. Channel Types: A (current) Factory set accuracy: better than ±2% of range Current Input Range : 0mA to 50mA rms, 50/60Hz nominal Transformer Ratio: 10/0.05 to 1000/0.05 Input Load Burden: 1W Isolation: None (provided by CT) Part No HA028581 Issue 3 Sep-05 273 Engineering Handbook Mini8 Controller 28.9 Load Failure Detection Requires CT3 module Max number of loads: 16 Time Proportioned Outputs Max loads per CT: 6 loads per CT input Alarms: 1 in 8 Partial load failure, Over current, SSR short circuit, SSR open circuit Commissioning: Automatic or manual Measurement interval: 1 sec - 60 sec 28.10 DI8 8-Channel Digital Input Card The DI8 supports 8 independent input channels. Input Types: Logic (24Vdc) Input Logic 0 (off): < 5Vdc. Input Logic 1 (on): > 10.8Vdc. Input Operating Range: -30Vdc to +30Vdc. Input Current: 2.5mA (approx.) at 10.5V; 10mA max @ 30V supply. Detectable Pulse Width: 110ms min. Isolation channel-channel: 42Vpkmax Isolation to system: 42Vpkmax. 28.11 RT4 Resistance Thermometer Input Card The RT4 supports 4 independently programmable and electrically isolated resistance input channels. Each channel may connected as 2 wire, 3 wire or 4 wire. Channel Types: Resistance/PT100 Input Range: 0 to 600 ohms, -200°C to +850°C for PT100 Calibration Error ±0.1ohms ±0.1% of reading, 22 to 500 ohms ±0.3°C ±0.1% of reading, -200°C to +850°C Resolution: 0.008 ohms, 0.2°C Measurement Noise 0.016 ohms, 0.04°C peak to peak, 1.6s channel filter 0.06 ohms, 0.15°C peak to peak, no filter 274 Linearity error ±0.02 ohms, ±0.05°C Temp coefficient ±0.002% of ohms reading per °C ambient change relative to normal ambient 25°C Lead resistance: 22 ohms max in each leg. Total resistance including leads is restricted to the 600 ohm maximum limit. 3 wire connection assumed matched leads. Bulb current 300µA Isolation channel-channel: 42Vpkmax Isolation to system: 42Vpkmax Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 28.12 AO8 8-Channel and AO4 4-Channel 4-20mA Output Card The AO8 supports 8 independently programmable and electrically isolated mA output channels for 4-20mA current-loop applications. The AO4 supports 4 channels to the same specification. The AO4 and AO8 modules may only be fitted in slot 4. Channel Types: mA (current) Output Output Range : 0-20mA, 360Ω load max. Setting Accuracy: ±0.5% of reading Resolution: 1 part in 10000 (1uA typical) Isolation channel-channel: 42Vpkmax Isolation to system: 42Vpkmax Part No HA028581 Issue 3 Sep-05 275 Engineering Handbook Mini8 Controller 28.13 Toolkit Blocks User Wires: Orderable options of 30, 60 120 or 250 User values: 32 real values 2 Input Maths: 24 blocks Add, subtract, multiply, divide, absolute difference, maximum, minimum, hot swap, sample and hold, power, square root, Log, Ln, exponential, switch 2 Input Logic: 24 blocks AND, OR, XOR, latch, equal, not equal, greater than, less than, greater than or equal to, less than or equal to 8 Input Logic: 4 blocks AND, OR, XOR 8 Input Multiple Operator 4 blocks Maximum, Minimum, Average. Input/Outputs to allow cascading of blocks 8 Input Multiplexer: 4 blocks BCD Input: 2 blocks 8 sets of 8 values selected by input parameter 2 decades (8 inputs giving 0 to 99). Input monitor: 2 blocks Max, min, time above threshold 16 Point Linearisation: 2 blocks 16-point linearisation fit Polynomial Fit: 2 blocks Characterisation by Poly Fit table Switchover: 1 block Smooth transition between two input values Timer blocks: 8 blocks OnPulse, OnDelay, OneShot, MinOn Time Counter blocks: 2 blocks Up or down, Directional flag Totaliser blocks: 2 blocks Alarm at Threshold value Real time clock: 1 block Day & time, 2 time based alarms Transducer Scaling 2 blocks Transducer Auto-tare, calibration & comparision cal. 276 Part No HA028581 Issue 3 Sep-05 Mini8 Controller Engineering Handbook 28.14 PID Control Loop Blocks Number of Loops: 0, 4, 8 or 16 Loops (order options) Control modes: On/Off, single PID, Dual channel OP Control Outputs: Analogue 4-20mA, Time proportioned logic, Cooling algorithms: Linear, water, fan, or oil Tuning: 3 sets PID, One-shot auto-tune. Auto manual control: Bumpless transfer or forced manual output available Setpoint rate limit: Ramp in units per sec, per min or per hour. Output rate limit: Ramp in % change per second Other features: Feedforward, Input track, Sensor break OP, Loop break alarm, remote SP, 2 internal loop setpoints 28.15 Process Alarms Number of alarms: 32 analogue, 32 digital, 32 Sensor break, Alarm types: Absolute high, absolute low, deviation high, deviation low, deviation band, sensor break, logic high, logic low, rising edge, falling edge, edge. Alarm modes: Latching or non-latching, blocking, time delay. 28.16 Setpoint Programmer The Setpoint Programmer is a software orderable option Number of programs: 8 Number of segments: 128 Number of event outputs: 8 per program (64 total) Digital inputs: Run, Hold, Reset, Run/Hold, Run/Reset, Program Advance, Skip, Segment, Sync Power failure action: Ramp, Reset, Continue Servo start: PV, SP 28.17 Recipes Recipes are a software orderable option Number of recipes: 8 Tags: 24 tags in total Part No HA028581 Issue 3 Sep-05 277 Engineering Handbook 278 Mini8 Controller Part No HA028581 Issue 3 Sep-05 INTERNATIONAL SALES AND SERVICE AUSTRALIA Sydney HONG KONG & CHINA NORWAY Oslo Eurotherm Pty. Ltd. Telephone (+61 2) 9838 0099 Fax (+61 2) 9838 9288 E-mail info@eurotherm.com.au Eurotherm Limited Aberdeen Telephone (+85 2) 28733826 Fax (+85 2) 28700148 E-mail eurotherm@eurotherm.com.hk Eurotherm A/S Telephone Oslo (+47 67) 592170 Fax (+47 67) 118301 E-mail info@eurotherm.se AUSTRIA Vienna Eurotherm GmbH Telephone (+43 1) 7987601 Fax (+43 1) 7987605 E-mail eurotherm@eurotherm.at BELGIUM & LUXEMBURG Huy Guangzhou Office Telephone (+86 20) 8755 5936 Fax (+86 20) 8755 5831 Beijing Office SWEDEN Malmo Shanghai Office BRAZIL Campinas-SP INDIA Chennai Eurotherm Ltda. Telephone (+5519) 3707 5333 Fax (+5519) 3707 5345 E-mail eurothermltda@eurothermltda.com.br Eurotherm India Limited Telephone (+9144) 2496 1129 Fax (+9144) 2496 1831 E-mail sales@eurothermdel.com Eurotherm Danmark A/S Telephone (+45 70) 234670 Fax (+45 70) 234660 E-mail info@eurotherm.se Telephone (+86 21) 6352 6406 Fax (+86 21) 6352 7351 Eurotherm Finland Telephone (+358) 22506030 Fax (+358) 22503201 FRANCE Lyon Eurotherm Automation SA Telephone (+33 478) 664500 Fax (+33 478) 352490 E-mail ea@automation.eurotherm.co.uk Eurotherm Ireland Limited Telephone (+353 1) 469180 Fax (+353 01) 4691300 E-mail info@eurotherm.ie Eurotherm S.r.l Telephone (+39 31) 975111 Fax (+39 31) 977512 Telex 380893 EUROTH I E-mail info@eurotherm.it KOREA Seoul Eurotherm Korea Limited Telephone (+82 31) 2738507 Fax (+82 31) 2738508 E-mail help@eurotherm.co.kr GERMANY Limburg NETHERLANDS Alphen a/d Ryn Eurotherm Deutschland GmbH Telephone (+49 6431) 2980 Fax (+49 6431) 298119 E-mail info@regler.eurotherm.co.uk Eurotherm B.V. Telephone (+31 172) 411752 Fax (+31 172) 417260 E-mail sales@eurotherm.nl © Copyright Eurotherm Limited 2005 All rights are strictly reserved. No part of this document may be reproduced, modified, or transmitted in any form by any means, nor may it be stored in a retrieval system other than for the purpose to act as an aid in operating the equipment to which the document relates, without the prior written permission of Eurotherm limited. Eurotherm Limited pursues a policy of continuous development and product improvement. The specifications in this document may therefore be changed without notice. The information in this document is given in good faith, but is intended for guidance only. Eurotherm Limited will accept no responsibility for any losses arising from errors in this document. HA028581/3 CN21541 Eurotherm AB Telephone (+46 40) 384500 Fax (+46 40) 384545 E-mail info@eurotherm.se SWITZERLAND Freienbach Eurotherm Produkte (Schweiz) AG Telephone (+41 55) 4154400 Fax (+41 55) 4154415 E-mail epsag@eurotherm.ch IRELAND Dublin ITALY Como FINLAND Abo Eurotherm España SA Telephone (+34 91) 6616001 Fax (+34 91) 6619093 E-mail ventas@iberica.eurotherm.co.uk Telephone (+86 10) 6762 0936 Fax (+86 10) 6762 0931 Eurotherm S.A/N.V. Telephone (+32) 85 274080 Fax (+32 ) 85 274081 E-mail sales@eurotherm-belgium.be DENMARK Copenhagen SPAIN Madrid UNITED KINGDOM Worthing Eurotherm Limited Telephone (+44 1903) 268500 Fax (+44 1903) 265982 E-mail info@eurotherm.co.uk Web www.eurotherm.co.uk U.S.A Leesburg VA Eurotherm Inc. Telephone (+1 703) 443 0000 Fax (+1 703) 669 1300 E-mail info@eurotherm.com Web www.eurotherm.com ED43 ENG http://www.eurotherm.co.uk



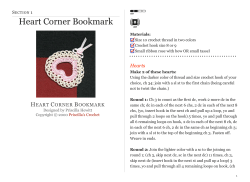

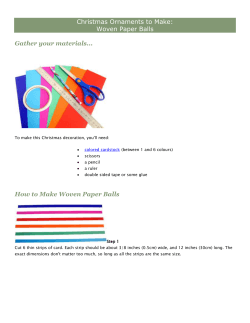
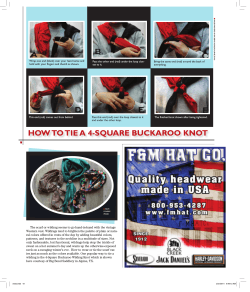

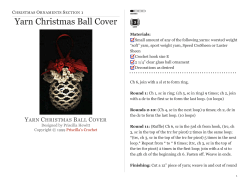

© Copyright 2025