
Mechanical sensitivity reveals evolutionary dynamics of mechanical
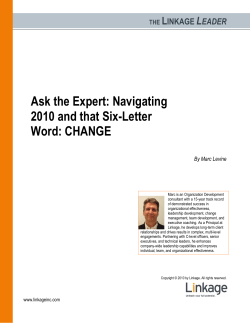
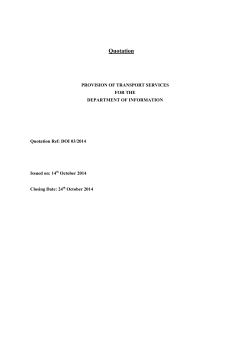
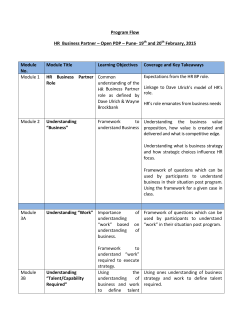
Downloaded from http://rspb.royalsocietypublishing.org/ on March 2, 2015 rspb.royalsocietypublishing.org Mechanical sensitivity reveals evolutionary dynamics of mechanical systems P. S. L. Anderson and S. N. Patek Department of Biology, Duke University, Box 90338, Durham, NC 27708, USA Research Cite this article: Anderson PSL, Patek SN. 2015 Mechanical sensitivity reveals evolutionary dynamics of mechanical systems. Proc. R. Soc. B 282: 20143088. http://dx.doi.org/10.1098/rspb.2014.3088 Received: 19 December 2014 Accepted: 27 January 2015 Subject Areas: biomechanics, evolution Keywords: evolution, biomechanics, mechanical sensitivity, mechanical equivalence Author for correspondence: P. S. L. Anderson e-mail: philip.anderson@duke.edu Electronic supplementary material is available at http://dx.doi.org/10.1098/rspb.2014.3088 or via http://rspb.royalsocietypublishing.org. A classic question in evolutionary biology is how form–function relationships promote or limit diversification. Mechanical metrics, such as kinematic transmission (KT) in linkage systems, are useful tools for examining the evolution of form and function in a comparative context. The convergence of disparate systems on equivalent metric values (mechanical equivalence) has been highlighted as a source of potential morphological diversity under the assumption that morphology can evolve with minimal impact on function. However, this assumption does not account for mechanical sensitivity—the sensitivity of the metric to morphological changes in individual components of a structure. We examined the diversification of a four-bar linkage system in mantis shrimp (Stomatopoda), and found evidence for both mechanical equivalence and differential mechanical sensitivity. KT exhibited variable correlations with individual linkage components, highlighting the components that influence KT evolution, and the components that are free to evolve independently from KT and thereby contribute to the observed pattern of mechanical equivalence. Determining the mechanical sensitivity in a system leads to a deeper understanding of both functional convergence and morphological diversification. This study illustrates the importance of multi-level analyses in delineating the factors that limit and promote diversification in form–function systems. 1. Introduction For nearly 200 years, biologists have recognized the importance of the form– function relationship for understanding the diversity of life [1–6]. Classically, the mechanics of biological systems are viewed as limits on biological diversity: the immutable laws of physics restrict how organisms evolve [7]. However, scientists working on the biomechanics and function of form have also understood that not all morphological variation is equivalent in terms of its functional consequences [3–5,8,9]. Recent advances in both phylogenetic comparative methods and biomechanical analyses have allowed for a more rigorous exploration of how mechanical properties influence evolutionary patterns and processes [6]. A standard comparative biomechanics approach is to define a mechanical metric that allows different systems to be compared; for example, Reynolds number offers a single, dimensionless number that represents an organism’s experience in fluids, and mechanical advantage expresses force transfer through a lever system. The mechanical similarity expressed through these metrics allows comparisons among diverse systems. The metrics themselves can also be used as trait data in comparative evolutionary analyses [10,11]. An inherent property of biomechanical metrics is that multiple morphological configurations yield synonymous mechanical outputs, a phenomenon which we term mechanical equivalence. Mechanical equivalence, alternatively termed many-to-one mapping or functional redundancy [12], has been suggested to enhance morphological diversification by allowing morphological evolution to occur without functional consequence (functional consequence here is defined as the magnitude of change in the biomechanical metric being studied) [13 –19]. Thus, researchers have concluded that mechanical equivalence can lead to the decoupling of morphological and functional variation (figure 1) [13,20,21] and enhanced evolutionary diversification [22]. A key assumption of the argument that mechanical equivalence enhances diversification is that morphological components can vary without significant effects on & 2015 The Author(s) Published by the Royal Society. All rights reserved. Downloaded from http://rspb.royalsocietypublishing.org/ on March 2, 2015 2 mechanical equivalency rspb.royalsocietypublishing.org mechanical metric (KT) (a) KT morphology morphology mechanical metric (KT) mechanical sensitivity KT L1 L2 L3 morphology Figure 1. Examining the mechanical sensitivity of a mechanical metric to variation in its morphological components is key to understanding the evolutionary dynamics of mechanically equivalent systems, such as a four-bar linkage. (a) Mechanical equivalency occurs when multiple morphological configurations yield convergent values of a mechanical metric, such as kinematic transmission (KT). (b) Mechanical sensitivity is indicated by variable effects of components on the mechanical metric, such that some are tightly correlated to the metric (L1, red) and others are not correlated (L2, orange; L3, blue). Thus, in this example, the evolutionary diversification of KT is influenced by the component to which it is most sensitive (L1), whereas components to which KT is less sensitive (L2 and L3) are free to diversify without affecting KT. Combining analyses of mechanical equivalence with analyses of mechanical sensitivity can provide a more accurate portrait of the evolutionary dynamics of form – function relationships than is offered by analyses at only the mechanical equivalence level. (Online version in colour.) the focal mechanical metric. Note that ‘equivalence’, as used here, does not refer to overall mechanical equivalence between linkages, but only to equivalence in the specific measurement of KT. However, in spite of this assumption, morphological shifts in different components of a biomechanical system may have differential mechanical consequences [4,5], which we term mechanical sensitivity. For example, small morphological changes in one part of a mechanism can cause a large shift in the magnitude of the biomechanical metric, whereas another component might be able to vary substantially with minimal impact on the metric [5]. Evidence of differential mechanical sensitivity has been hinted at in published studies of mechanical equivalence [23,24] (see [4] for further discussion). Mechanical sensitivity potentially offers improved insights into the evolutionary dynamics of mechanical systems over the current prevailing focus on mechanical equivalence. Indeed, mechanical equivalence suggests a general lack of correlation between the morphology and function of a system, whereas mechanical sensitivity can pinpoint the precise evolutionary relationships between morphological components and mechanical metrics (figure 1). In order to test a framework that connects and delineates mechanical equivalence and mechanical sensitivity, we examined these two phenomena via the evolution of linkage systems. Linkage systems offer a central and historic focal point for analyses of mechanical and morphological change [10,11, 25 –27]. The non-dimensional metric for motion transferred across a linkage system is called kinematic transmission (KT). KT is an exemplar metric for exploring the relationship between morphological and mechanical change as its value is determined by the morphology of a series of component links. In this study, we analyse KT while considering both overall linkage morphology and variation among these individual linkage components. Ultimately, this approach allows analysis of both mechanical equivalence and differential mechanical sensitivity. We examined the four-bar linkage system found in the raptorial appendages of mantis shrimp (Stomatopoda). The mantis shrimp’s raptorial appendage is a spring-driven, power-amplified mouthpart used to strike prey items at ultra-fast speeds (peak speed up to 30.6 m s21, acceleration up to 154 km s22) [28,29]. Raptorial appendages are morphologically diverse, and are used for a variety of functions ranging from spearing to smashing (figure 2b,c) [30,31]. Energy released by the spring mechanism is delivered to the strike via a series of linked mechanisms, including an exoskeletal, four-bar linkage [28– 32]. In order to assess the dynamics of mechanical equivalence and mechanical sensitivity, we tested two hypotheses using the morphological variation offered by mantis shrimp linkage components (figure 2). First, we tested whether the mantis shrimp linkage system exhibits a pattern of mechanical equivalence across clades, specifically asking whether clades with similar mechanical outputs show divergent morphology of the linkage system and whether the morphology of the Proc. R. Soc. B 282: 20143088 (b) Downloaded from http://rspb.royalsocietypublishing.org/ on March 2, 2015 dactyl (b) (a) dactyl Proc. R. Soc. B 282: 20143088 (d) (e) meral-V (f) 4 1 3 2 Figure 2. The raptorial appendage of the mantis shrimp (Stomatopoda) is a spring-driven, power-amplified appendage used to strike prey items at ultra-fast speeds (peak speeds up to 30.6 m s21, accelerations up to 154 km s22) [24,25]. (a) A smasher mantis shrimp, Neogonodactylus bredini, is holding the raptorial appendage in a folded position (black outline). (b) Smashers use the hammer-shaped base of the dactyl to break open hard-shelled prey. (c) Spearers snag softer, evasive prey with an elongate, spiny dactyl. (d) Force and motion generated by the spring mechanism are transferred to the swinging appendage via a four-bar linkage. The meral-V rotates distally (to left of page) when the spring is released. This action pushes on the swinging arm, which then rotates distally to perform the strike. (e) Mechanical equivalence was measured using discrete landmarks (red dots) that represent the morphology of the whole four-bar linkage system. (f ) Mechanical sensitivity of individual components was measured via individual link lengths (coloured and numbered lines). Scale bars, 15 mm. Distal, left; dorsal, top of the page. (Online version in colour.) system as a whole (landmark coordinates) correlates with KT across phylogeny. Second, we tested for variable mechanical sensitivity among the individual links of the system by comparing the evolution of the mechanical metric (KT) with evolutionary changes in the individual links (link lengths). The outcome of these analyses offers new, quantitative insights into the dynamics between apparent equivalence of mechanical systems and the sensitivity of their mechanics to morphological change in individual components. 2. Methods We performed morphological analyses on 195 mantis shrimp specimens representing 36 species from six superfamilies (see the electronic supplementary material). This dataset included smashers (18 taxa), spearers (16 taxa) and two undifferentiated species (both from the genus Hemisquilla). For comparison between appendage types, the undifferentiated taxa were grouped with the spearers owing to their phylogenetic placement outside the monophyletic smasher clade [33,34], as well as their similarity in functional parameters [31] and muscle physiology [35] to spearers. The raptorial appendages were photographed in lateral view using a Nikon D300 digital camera (12 megapixel; AF micro-Nikkor 60 mm F/2.8D or 105 mm F/2.8D macro lenses). rspb.royalsocietypublishing.org (c) 3 The spring system is built of exoskeleton, thus all linkage measurements were externally visible. The appendage was measured with the segments folded against the merus in order to ensure that the landmarks on the merus and carpus segments were in the same relative orientation to each other on every specimen. (a) Overall linkage morphology In order to test for mechanical equivalence, the linkage system was quantified as a series of landmarks, which are defined by the system’s four points of rotation, and the proximal and distal excursion points of the meral-V (figure 2e). Meral-V excursion is externally visible (figure 2d ). When at rest, the meral-V lies in a distally extended position, representing maximal distal rotation during striking. When loaded, the meral-V is compressed against a defined region of the merus exoskeleton. The difference between the open and closed positions of the meral-V denotes the total input rotation of the linkage system, and thus provides key information about the changing mechanics and shape of linkages during a strike. Landmarks were digitized using TPSDIG v. 2.0 [36]. Landmark morphometric data were aligned using Procrustes superimposition procedures that remove scale, rotation and translation from the data [37]. The new, aligned coordinates were then used to construct a principal component (PC) analysis to summarize the variation in shape along a series of orthogonal axes. This resulted in a landmark-based linkage system morphospace. We also calculated average landmark configurations for Downloaded from http://rspb.royalsocietypublishing.org/ on March 2, 2015 (b) Individual component morphology (c) Kinematic transmission In order to compare the morphological data with KT, we used the minimum KT. KT is the ratio of the rotation of the output link (link 3: carpus) to the input link (link 2: meral-V). However, KT is a dynamic metric that changes over the course of rotation as the orientation of the linkage shifts [32]. Minimum KT refers to the lowest value of KT for a given linkage over the course of its full rotation as defined by the meral-V excursion. These data were collected and published previously from the same specimens analysed in this study [31]. (d) Analyses Morphological differences in the stomatopod linkage system among subclades (superfamilies) were determined using nonparametric multivariate analysis of variance (npMANOVA) as well as discriminant function analysis (DFA). While npMANOVA was used to determine whether the a priori groups can be defined by discrete differences in continuous variables (in this case, the axes of our morphospace), the DFA determines whether the morphological data actually support the original groupings. npMANOVA was performed in PAST v. 1.94b [40], and the DFA was performed in MORPHOJ v. 1.04a [39]. In order to assess the relationship between KT and either whole linkage morphology (landmark data; figure 2e) or individual component morphology (links; figure 2f ), we used linear regression analysis on the data from individuals (primarily for visualization purposes) and phylogenetic least-squares regression (PGLS) on species averages. For the phylogenetic analyses, we used a previously published pruned and time-calibrated molecular phylogenetic tree based on nucleotide sequence data [34]. Time calibrations were based on hard-bound calibration points from fossil data [41]. PGLS analyses were performed using the R package CAPER v. 0.2 [42] with delta and kappa fixed at 1 and lambda estimated using maximum-likelihood methods. Estimating lambda allowed the model to deviate from a strict Brownian motion model of evolution. The PGLS models were used to measure strength of correlation between morphology and KT values. The Akaike information criterion was used to assess which independent variables (PC axes and link lengths) had the strongest influence on the evolution of KT. Finally, we tested whether individual morphological components of the linkage (individual links) evolve in a similar pattern to KT by applying maximum-likelihood techniques to test alternative adaptive models for morphological traits. 3. Results (a) Mechanical equivalence Mantis shrimp four-bar linkages exhibit mechanical equivalence across species. A PC analysis based on linkage system landmarks illustrates that a wide range of linkage systems can result in similar values of KT (figures 3 and 4). The morphology of the linkage system (represented by PC scores) is weakly correlated with KT (all r 2-values less than 0.5). When species averages are used, the evolutionary correlations between KT and PC scores are equally weak (table 1). Clades previously demonstrated to have similar function (KT; Squilloidea, Lysiosquilloidea, Pseudosquilloidea and Parasquilloidea [31]) have a wide range of divergent morphological forms, some of which overlap with the mechanically distinct smasher clade (Gonodactyloidea; figure 5). Permutation MANOVA tests (F-stat ¼ 39.29, p , 0.0001, based on 10 000 permutations) and discriminant function analyses (between each pair of subclades) support these observations (electronic supplementary material, table S1). (b) Mechanical sensitivity A combination of phylogenetic regression analyses and evolutionary modelling indicates differential mechanical sensitivity of KT to the three mobile links of the stomatopod linkage system. Link 3 (defined as the dorsal –ventral length of the carpus) has a much stronger correlation with KT than either links 2 or 4 (figure 4; link 3 r2 ¼ 0.73). PGLS analyses show that link 3 is a better single predictor for the evolution of KT across stomatopods than the other links and any of the PC axes from the landmark analyses (table 1). The evolution of link 3 across stomatopods matches the pattern previously reported for KT [31]. For both link 3 and KT, an OU multi-peak model (in which smashers and spearers evolve towards different optima) is better supported than either Brownian motion or an OU single-peak model (table 2). The multi-peak pattern is also the best supported model of evolution for link 2, although the degree of support is lower. The evolution of link 4 is best described by a Brownian motion (random walk) model (table 2). 4. Discussion The mantis shrimp four-bar linkage system demonstrates both mechanical equivalence of the whole system and 4 Proc. R. Soc. B 282: 20143088 In order to analyse the mechanical sensitivity of KT to variation of the individual links of the four-bar system, we measured the lengths of the three mobile links relative to the immobile link (figure 2f ). The specifics of the linkage system in mantis shrimp have been covered in previous work [31,32], and we briefly review them here: link 1 is the fixed (immobile) link represented by the proximal merus; link 2 is the meral-V, which acts as the input link; link 3 is the carpus, which acts as the output link; and link 4 is the contracted extensor muscle, which runs from the carpus to the merus. KT is scale independent; the relative link lengths determine the value of KT. In order to account for size differences among taxa, we measured the lengths of links 2, 3 and 4 and divided each by the length of the fixed link (link 1) following procedures from work on other four-bar systems [13,20]. We modelled trait evolution using functions in the R package OUCH v. 2.8-1 [43], which estimates the Brownian motion rate parameter (s 2), strength of selection (a), optimal trait values (u) and support (Akaike information criterion corrected for finite sample sizes, AICc) for each model. We compared three distinct models of evolution: a Brownian motion model (a ¼ 0 and u ¼ 0), a single-peak Ornstein – Uhlenbeck (OU) model (Brownian motion pulled towards a single adaptive peak (u) for each parameter), and an OU model that was set to pull towards two adaptive peaks, one for smashers and one for spearers þ Hemisquilla [44]. The multi-peak OU model differentiates the evolution between smashers and spearers; therefore, ancestral state reconstructions are necessary to assign appendage types to the internal nodes of the tree. We used previously published ancestral state reconstructions [31] based on a rerooting method [45] as implemented in PHYTOOLS v. 2.9 [38]. rspb.royalsocietypublishing.org each species in order to create a species-based morphospace, generate coordinates for phylogenetic comparative analyses and construct a phylomorphospace using PHYTOOLS v. 2.9 [38]. All morphometric analyses were performed in the software package MORPHOJ v. 1.04a [39]. Downloaded from http://rspb.royalsocietypublishing.org/ on March 2, 2015 5 0.2 rspb.royalsocietypublishing.org 0.1 KT (log) PC2 0 Proc. R. Soc. B 282: 20143088 1.1 1.0 0.9 0.8 0.7 0.6 0.5 smasher specimen range spearer specimen range –0.1 undifferentiated specimen range –0.2 –0.1 0.1 0 PC1 Figure 3. The stomatopod linkage system shows the classic pattern of mechanical equivalence in which a mechanical metric (KT; colour map) is overlaid onto a morphospace based on linkage morphology. The morphospace is composed of PC axes 1 and 2 from a landmark-based PC analysis of 195 stomatopod specimens (each point represents an individual specimen). A total of 36 species are represented with 1 – 10 specimens per species. KT is overlaid onto the morphospace as a ‘heat map’ showing a pattern of decoupled KT from morphology. Three ecological groups defined by appendage mechanics (smashers, spearers and undifferentiated) are identified in morphospace and show overlap in morphology and KT. (Online version in colour.) (a) logKT 1.0 0.8 0.6 –0.2 –0.1 0 –0.1 0.1 0 PC2 PC1 0.1 0.2 –0.1 0 PC3 0.1 (b) logKT 1.0 0.8 0.6 0.6 0.7 0.8 link 2 0.9 1.0 0.05 0.10 0.15 link 3 0.20 1.0 1.2 1.4 link 4 Figure 4. By examining the mechanical sensitivity of the stomatopod four-bar system, it is possible to identify the influence of individual morphological components on the evolution of mechanical outputs. (a) Plots of kinematic transmission (KT) versus the overall morphology of the four-bar system, denoted here by PC axes 1 – 3, show a decoupling of form from function as expected in a mechanically equivalent system. (b) However, plots of KT versus the individual components of the system (the lengths of links 2, 3 and 4 all divided by link 1, as explained in the Methods) show that one component (link 3) is tightly correlated with KT, which potentially allows the other components (link 2 and link 4) to vary independently from KT. (Online version in colour.) differential mechanical sensitivity of KT to individual linkage components. Multiple stomatopod lineages converge on similar mechanical outputs via very different morphologies. However, analyses of individual link lengths revealed that certain components are tightly associated with KT, with strong evolutionary correlations between link 3 and KT. These results offer a new lens on the relationships among morphology, function and evolution, and, Downloaded from http://rspb.royalsocietypublishing.org/ on March 2, 2015 0.15 6 rspb.royalsocietypublishing.org 0.10 PC2 0.05 0 –0.20 –0.10 –0.15 –0.05 PC1 0 0.05 Figure 5. This phylomorphospace of the stomatopod linkage system illustrates the mechanically equivalent nature of kinematic transmission (KT). The morphospace is composed of PC axes 1 and 2 from a landmark-based PC analysis of 36 stomatopod species representing overall morphology of the linkage system. Previous work showed that the four-bar system in spearing clades (Lysiosquilloidea, Parasquilloidea, Pseudosquilloidea and Squilloidea; shown in colour) all evolve towards high KT values. However, this phylomorphospace indicates that each clade does so with distinctive morphologies (sometimes multiple morphologies within clades). Furthermore, certain taxa from the Parasquilloidea and Pseudosquilloidea clades inhabit morphospace adjacent to the smasher clade (Gonodactyloidea; shown in black). (Online version in colour.) Table 1. Phylogenetic generalized least-squares (PGLS) analyses support link 3 as the best single predictor of KT evolution across Stomatopoda. Link 3 has a higher correlation with the mechanical metric (KT) than the other links, or any of the PC axes from the whole system morphological analysis (PCs 1– 8). independent variable l d.f. F-statistic p-value r2 AICc log likelihood link 2 link 3 0.857 0.911 2.34 2.34 0.439 94.53 0.648 ,0.0001 20.016 0.73 230.84 278.16 17.6 41.26 link 4 0.878 2.34 0.0182 0.982 20.029 230.44 17.4 PC1 PC2 0.874 0.883 2.34 2.34 2.231 0.031 0.123 0.97 0.034 20.028 232.71 230.45 18.54 17.41 PC3 PC4 0.878 0.875 2.34 2.34 0.087 0.04 0.916 0.961 20.027 20.028 230.52 230.46 17.44 17.41 PC5 PC6 1.000 0.859 2.34 2.34 16.29 2.765 ,0.0001 0.077 0.304 0.048 240.37 233.21 22.37 18.78 PC7 0.832 2.34 22.6 ,0.0001 0.38 248.59 26.48 PC8 0.899 2.34 0.043 0.065 233.85 19.11 3.452 more broadly, the interplay between physical laws and evolutionary processes. (a) Mechanical equivalence Mantis shrimp four-bar linkage systems exhibit a pattern of mechanical equivalence that is similar to the findings in other biological linkage systems. While our data confirmed the presence of mechanical equivalence in mantis shrimp, it is key to note that it would have been surprising not to find mechanical equivalence given that mantis shrimp have convergent KT. Similar KTs are, by definition, mechanically equivalent. Thus, our findings confirm the expected mechanical equivalence of KT and offer another excellent example of biological diversification essentially exploring a space of general physical rules. (b) Mechanical sensitivity Analyses of mechanical sensitivity pinpoint the components of a system to which the mechanical output is most sensitive. The evolution of link 3 is tightly correlated with the evolution of KT based on both PGLS and evolutionary trait modelling (table 2). Link 3 is the output link and transfers motion from the linkage system to the weaponry of the raptorial appendage (the distally rotating propodus and dactyl segments that hammer or spear prey; figure 2). Therefore, evolutionary shifts in link 3 simultaneously affect linkage KT and the lever system formed by the rotating weaponry [31]. The mechanics of link 3 thereby tie both the mechanics and evolution of the linkage and lever system together, reflecting the coupled evolutionary pattern previously identified in this system [31]. Mechanical sensitivity analyses can also be used to identify the components of a mechanical system to which the output metrics are insensitive. In the stomatopod linkage system, mobile links 2 and 4 show little correlation with KT (figure 4). Link 2 represents the meral-V (the input link), whereas link 4 is a muscle –tendon element that connects the carpus to the stationary link of the merus and incorporates the saddle (figure 2f ). As figure 4 illustrates, the relative insensitivity of KT to these links probably forms the Proc. R. Soc. B 282: 20143088 –0.10 Gonodactyloidea Hemisquilloidea Lysiosquilloidea Parasquilloidea Pseudosquilloidea Squilloidea Downloaded from http://rspb.royalsocietypublishing.org/ on March 2, 2015 Table 2. Evolutionary model comparisons for the mechanical metric (KT) and individual morphological components (link lengths) across stomatopod phylogeny. Italicized AICc values indicate best-fit model. s 2, Brownian motion rate parameter; a, strength of selection; u, optimal trait value. s2 a u Brownian OU single peak 226.219 223.13 0.0564 0.0789 n.a. 0.749 n.a. 1.928 OU multi peak link 2 229.414 0.103 2.027 1.598, 1.99 Brownian 291.85 0.0091 n.a. n.a. OU single peak OU multi peak 289.74 294.6 0.0136 0.020 0.952 2.597 0.793 0.675, 0.806 link 3 Brownian 2178.14 0.00083 n.a. n.a. OU single peak OU multi peak 2183.90 2187.74 0.00189 0.01694 2.739 34.45 0.106 0.115, 0.0987 Brownian OU single peak 282.022 281.81 0.012 0.029 n.a. 2.377 n.a. 1.07 OU multi peak 279.32 0.029 2.359 1.08, 1.07 link 4 basis of the mechanical equivalence pattern found when comparing overall morphology with KT. For example, link 4 shows no evolutionary correlation with KT (figure 4 and table 1), and evolutionary trait modelling gives strong support for an evolutionary pattern in link 4 that is distinct from KT and the other links (Brownian motion; table 2). Identifying morphological components to which a metric is mechanically insensitive allows for a better understanding of how mechanically equivalent systems diversify at the evolutionary scale. Mechanical sensitivity offers an approach for examining the interactions between the morphology of a system and its function beyond single metrics such as KT. In stomatopods, link 3 is evolutionarily correlated with KT, whereas links 2 and 4 are not. However, that does not mean that links 2 and 4 are not mechanically important. Both the meral-V (link 2) and the saddle (link 4) have previously been identified as part of the elastic mechanism underlying the extreme power amplification of the appendage [28,47–49]. We can hypothesize that the evolution of those components might be tied more closely with energy storage, as opposed to KT. By exploring mechanical sensitivity in this system, further evolutionary hypotheses can address the relationship between morphology and multiple functions. (c) Mechanical metrics and evolutionary analyses Analysing the evolution of biomechanical systems requires the identification of traits that allow comparisons across systems. Mechanical metrics, such as KT, enable comparisons of analogous mechanical systems, such as linkage systems in both modern [10,11] and fossil fishes [19], and between vertebrates and invertebrates (fish and mantis shrimp) [32]. When mechanical equivalence is invoked, it is generally in the context of a single mechanical metric (such as KT). Similarly, mechanical sensitivity refers to the sensitivity of a particular mechanical metric (such as KT). However, KT, like most mechanical metrics, can account only for a portion of the function of a mechanism. While multiple linkage configurations can share the same KT, the variation in absolute lengths of the components can affect other aspects of linkage function not represented by KT [27,46]. For example, KT does not incorporate scaling. If a linkage is scaled to a larger size, KT will be identical, but the kinematics of the system (speed, vector of motion, absolute distance travelled) will change. These important aspects of linkage mechanisms have largely not been analysed in biological systems, given the prevailing focus on KT, and thus merit consideration in the broader context of animal function, performance and multi-functionality. (d) Evolutionary biomechanics While mechanical equivalence has been suggested to have strong evolutionary implications, analyses of mechanical sensitivity are critical for assessing the evolutionary dynamics of mechanical systems. Differential mechanical sensitivity is a general phenomenon in form – function relationships involving multi-part mechanisms [4,5]. There is evidence in fish linkage systems, often used as a key example of the evolutionary effects of mechanical equivalence, for differential mechanical sensitivity. Barel [4] suggested that the lower jaw link in cichlids is more ‘functionally effective’ than the other links, allowing morphological variation in the rest of the system with little functional consequence. Recent work on cichlids from Lake Malawi found a tight correlation between the ratio of two links (lower jaw and maxilla) of the oral four-bar and KT [24]. Differential mechanical sensitivity has also been identified in the jaw system of shrews [23]. Using evolutionary correlations to identify differential mechanical sensitivity offers new insights into the evolution of biomechanical systems and the effects of mechanical equivalence on diversification. Combining the concepts of mechanical equivalence and mechanical sensitivity into a single framework Proc. R. Soc. B 282: 20143088 AICc rspb.royalsocietypublishing.org KT 7 Downloaded from http://rspb.royalsocietypublishing.org/ on March 2, 2015 offers a comprehensive understanding of biomechanical evolution and the role of physics in evolutionary processes. digitally at Dryad Digital Repository (doi:10.5061/dryad.4m7v7). Acknowledgements. We thank K. Smith, M. Rosario, P. Green and R. Crane for helpful suggestions on drafts of this manuscript and to D. Polly for helpful advice on comparative methods. We are especially grateful to two reviewers for their insightful comments that have greatly improved the quality of this paper. We also thank Funding statement. This research was supported by a National Science Foundation grant (IOS-1149748) awarded to S.N.P. Competing interests. We have no competing interests. Cuvier G. 1798 Tableau e´le´mentaire de l’histoire naturelle des animaux. Paris, France: Baudouin, Imprimeur. 2. Seilacher A. 1970 Arbeitskonzept zur konstruktionsmorphologie. Lethaia 3, 393 –396. (doi:10.1111/j. 1502-3931.1970.tb00830.x) 3. Lauder GV. 1991 Biomechanics and evolution: integrating physical and historical biology in the study of complex systems. In Biomechanics in evolution (eds JMV Rayner, RJ Wootton), pp. 1– 19. Cambridge, UK: Cambridge University Press. 4. Barel CDN. 1993 Concepts of an architectonic approach to transformation morphology. Acta Biotheoretica 41, 345 –381. (doi:10.1007/ BF00709371) 5. Koehl MAR. 1996 When does morphology matter? Annu. Rev. Ecol. Syst. 27, 501–542. (doi:10.1146/ annurev.ecolsys.27.1.501) 6. Taylor G, Thomas A. 2014 Evolutionary biomechanics. Oxford, UK: Oxford University Press. 7. Maynard Smith J, Burian R, Kauffman S, Alberch P, Campbell J, Goodwin B, Lande R, Raup D, Wolpert L. 1985 Developmental constraints and evolution: a perspective from the mountain lake conference on development and evolution. Q. Rev. Biol. 60, 265–287. (doi:10.1086/414425) 8. Vermeij GT. 1973 Adaptation, versatility, and evolution. Syst. Zool. 22, 466– 477. (doi:10.2307/ 2412953) 9. Lauder GV. 1981 Form and function: structural analysis in evolutionary morphology. Paleobiology 7, 430–442. 10. Wainwright PC, Bellwood DR, Westneat MW, Grubich JR, Hoey AS. 2004 A functional morphospace for the skull of labrid fishes: patterns and diversity in a complex biomechanical system. Biol. J. Linn. Soc. 82, 1–25. (doi:10.1111/j.10958312.2004.00313.x) 11. Westneat MW, Alfaro ME, Wainwright PC, Bellwood DR, Grubich JR, Fessler JL, Clements KD, Smith LL. 2005 Local phylogenetic divergence and global evolutionary convergence of skull function in reef fishes of the family Labridae. Proc. R. Soc. B 272, 993–1000. (doi:10.1098/rspb.2004.3013) 12. Wainwright PC. 2007 Functional versus morphological diversity in macroevolution. Annu. Rev. Ecol. Evol. Syst. 38, 381 –401. (doi:10.1146/ annurev.ecolsys.38.091206.095706) 1. 13. Hulsey CD, Wainwright PC. 2002 Projecting mechanics into morphospace: disparity in the feeding system of labrid fishes. Proc. R. Soc. Lond. B 269, 317 –326. (doi:10.1098/rspb.2001.1874) 14. Collar DC, Wainwright PC. 2006 Discordance between morphological and mechanical diversity in the feeding mechanism of centrarchid fishes. Evolution 60, 2575–2584. (doi:10.1111/j.00143820.2006.tb01891.x) 15. Stayton CT. 2006 Testing hypotheses of convergence with multivariate data: morphological and functional convergence among herbivorous lizards. Evolution 60, 824 –841. (doi:10.1111/j.0014-3820. 2006.tb01160.x) 16. Vanhooydonck B, Herrel A, Van Damme R, Irschick DJ. 2006 The quick and the fast: the evolution of acceleration capacity in Anolis lizards. Evolution 60, 2137 –2147. (doi:10.1111/j.0014-3820.2006. tb01851.x) 17. Young RL, Sweeney MJ, Badyaev AV. 2010 Morphological diversity and ecological similarity: versatility of the muscular and skeletal morphologies enables ecological convergence in shrews. Funct. Ecol. 24, 556 –565. (doi:10.1111/j. 1365-2435.2009.01664.x) 18. Husak JF, Ribak G, Baker RH, Rivera G, Wilkinson GS, Swallow JG. 2013 Effects of ornamentation and phylogeny on the evolution of wing shape in stalkeyed flies (Diopsidae). J. Evol. Biol. 26, 1281–1293. (doi:10.1111/jeb.12133) 19. Anderson PSL. 2010 Using linkage models to explore skull kinematic diversity and functional convergence in Arthrodire placoderms. J. Morphol. 271, 990 –1005. 20. Alfaro ME, Bolnick DI, Wainwright PC. 2004 Evolutionary dynamics of complex biomechanical systems: an example using the four-bar mechanism. Evolution 58, 495 –503. (doi:10.1111/j.0014-3820. 2004.tb01673.x) 21. Anderson PSL. 2009 Biomechanics, functional patterns, and disparity in Late Devonian arthrodires. Paleobiology 35, 321–342. (doi:10.1666/00948373-35.3.321) 22. Alfaro ME, Bolnick DI, Wainwright PC. 2005 Evolutionary consequences of many-to-one mapping of jaw morphology to mechanics in labrid fishes. Am. Nat. 165, E140 –E154. (doi:10.1086/ 429564) 23. Young RL, Haselkorn TS, Badyaev AV. 2007 Functional equivalence of morphologies enables morphological and ecological diversity. Evolution 61, 2480 –2492. (doi:10.1111/j.1558-5646.2007. 00210.x) 24. Parnell NF, Hulsey CD, Streelman JT. 2008 Hybridization produces novelty when the mapping of form to function is many to one. BMC Evol. Biol. 8, 122 –133. (doi:10.1186/1471-2148-8-122) 25. Anker GC. 1974 Morphology and kinetics of the stickleback, Gasterosteus aculeatus. Trans. Zool. Soc. 32, 311 –416. (doi:10.1111/j.1096-3642.1974. tb00030.x) 26. Muller M. 1987 Optimization principles applied to the mechanism of neurocranium levation and mouth bottom depression in bony fishes (Halecostomi). J. Theor. Biol. 126, 343 –368. (doi:10.1016/S0022-5193(87)80241-2) 27. Westneat MW. 1990 Feeding mechanics of teleost fishes (Labridae; Perciformes): a test of four-bar linkage models. J. Morphol. 205, 269– 295. (doi:10. 1002/jmor.1052050304) 28. Patek SN, Korff WL, Caldwell RL. 2004 Deadly strike mechanism of a mantis shrimp. Nature 428, 819–820. (doi:10.1038/428819a) 29. Cox SM, Schmidt D, Modarres-Sadeghi Y, Patek SN. 2014 A physical model of the extreme mantis shrimp strike: kinematics and cavitation of Ninjabot. Bioinspir. Biomim. 9, 1–16. (doi:10.1088/17483182/9/1/016014) 30. Ahyong ST. 2001 Revision of the Australian stomatopod Crustacea. Rec. Austral. Mus. Suppl. 26, 1–326. (doi:10.3853/j.0812-7387.26.2001.1333) 31. Anderson PSL, Claverie T, Patek SN. 2014 Levers and linkages: mechanical trade-offs in a poweramplified system. Evolution 68, 1919–1933. (doi:10.1111/evo.12407) 32. Patek SN, Nowroozi BN, Baio JE, Caldwell RL, Summers AP. 2007 Linkage mechanics and power amplification of the mantis shrimp’s strike. J. Exp. Biol. 210, 3677– 3688. (doi:10.1242/jeb.006486) 33. Ahyong ST, Jarman SN. 2009 Stomatopod interrelationships: preliminary results based on analysis of three molecular loci. Arth. Syst. Phylogenet. 67, 91– 98. 34. Porter ML, Zhang Y, Desai S, Caldwell RL, Cronin TW. 2010 Evolution of anatomical and physiological specialization in the compound eyes of stomatopod Proc. R. Soc. B 282: 20143088 References 8 rspb.royalsocietypublishing.org Data accessibility. Morphological and biomechanical data are available K. Reed (National Museum of Natural History, Washington, DC) and S. Keable (Australian Museum of Natural History, Sydney) for access to their specimen collections. Authors’ contributions. P.S.L.A. and S.N.P. conceived of and designed the study. P.S.L.A. carried out the data collection and data analysis. P.S.L.A. and S.N.P. drafted the manuscript. Both authors gave final approval for publication. Downloaded from http://rspb.royalsocietypublishing.org/ on March 2, 2015 36. 37. 39. 45. Yang Z, Goldman N, Friday A. 1995 Maximum likelihood trees from DNA sequences: a peculiar statistical problem. Syst. Biol. 44, 384–399. (doi:10. 1093/sysbio/44.3.384) 46. Westneat MW. 1994 Transmission of force and velocity in the feeding mechanisms of labrid fishes (Teleostei, Perciformes). Zoomorphology 114, 103–118. (doi:10.1007/BF00396643) 47. Zack TI, Claverie T, Patek SN. 2009 Elastic energy storage in the mantis shrimp’s fast predatory strike. J. Exp. Biol. 212, 4002–4009. (doi:10.1242/jeb. 034801) 48. Patek SN, Dudek DM, Rosario MV. 2011 From bouncy legs to poisoned arrows: elastic movements in invertebrates. J. Exp. Biol. 214, 1973–1980. (doi:10.1242/jeb.038596) 49. Patek SN, Rosario MV, Taylor JRA. 2013 Comparative spring mechanics in mantis shrimp. J. Exp. Biol. 216, 1317– 1329. (doi:10.1242/jeb.078998) 9 Proc. R. Soc. B 282: 20143088 38. 40. Hammer Ø, Harper DAT, Ryan PD. 2001 PAST: paleontological statistics software package for education and data analysis. Palaeontol. Electron. 4, 1–9. 41. Claverie T, Patek SN. 2013 Modularity and rates of evolutionary change in a power-amplified prey capture system. Evolution 67, 3191– 3207. (doi:10. 1111/evo.12185) 42. Orme D, Freckleton R, Thomas G, Petzoldt T, Fritz S, Isaac N, Pearse W. 2012 caper: comparative analyses of phylogenetics and evolution in R. R package version 0.5. See http://cran.r-project.org/web/ packages/caper/index.html. 43. King AA, Butler MA. 2009 OUCH: Ornstein – Uhlenbeck models for phylogenetic comparative hypotheses (R package). See http://ouch.r-forge. r-project.org. 44. Butler MA, King AA. 2004 Phylogenetic comparative analysis: a modeling approach for adaptive evolution. Am. Nat. 164, 683–695. (doi:10.1086/426002) rspb.royalsocietypublishing.org 35. crustaceans. J. Exp. Biol. 213, 3473–3486. (doi:10. 1242/jeb.046508) Mendoza Blanco M, Patek SN. 2014 Muscle trade-offs in a power-amplified prey capture system. Evolution 68, 1399– 1414. (doi:10.1111/ evo.12365) Rohlf FJ. 2006 TPSDIG, version 2.10. Stony Brook, NY: SUNY Dept. of Ecology and Evolution. Zelditch ML, Swiderski DL, Sheets HD, Fink WL. 2004 Geometric morphometrics for biologists: a primer. London, UK: Academic Press. Revell LJ. 2012 phytools: an R package for phylogenetic comparative biology (and other things). Methods Ecol. Evol. 3, 217 –223. (doi:10. 1111/j.2041-210X.2011.00169.x) Klingenberg CP. 2011 MorphoJ: an integrated software package for geometric morphometrics. Mole Ecol. Res. 11, 353 –357. (doi:10.1111/j.17550998.2010.02924.x)







© Copyright 2025