
sliding isolation using variable frequency bearings for near
4th International Conference on Earthquake Engineering
Taipei, Taiwan
October 12-13, 2006
Paper No. 164
SLIDING ISOLATION USING VARIABLE FREQUENCY BEARINGS FOR
NEAR-FAULT GROUND MOTIONS
Lyan-Ywan Lu1, Jain Wang2, Chao-Chun Hsu3
ABSTRACT
In order to overcome the low-frequency resonance problem that a conventional sliding isolation
system may encounter when subjected to an earthquake with near-fault characteristics, a sliding
isolator with variable frequency is proposed in this study. The isolator is similar to a typical friction
pendulum system (FPS), but the sliding surface has been made of an axially symmetric surface with a
variable curvature, rather than a spherical surface with a constant radius, so the isolation frequency
becomes a function of the isolator displacement. A polynomial function has been employed to define
the geometry of the sliding surface. A parametric study has been conducted to decide the optimal
values of the polynomial function. Since the isolation frequency of the proposed isolator is not a
constant, the low-frequency resonance due to long-period components of a near-fault earthquake can
be prevented. Numerical study has demonstrated that, when subjected to a long-period pulse-like
earthquake, the proposed isolator is able to simultaneously reduce the isolator drift and structural
acceleration, as compared with those of a conventional FPS system.
Keywords: variable frequency, near-fault earthquake, sliding isolation, polynomial function, variable
curvature
INTRODUCTION
It has been proven that seismic isolation using sliding bearings is an effective technology for
protecting seismic structures (Lu and Yang, 1997; Naeim and Kelly, 1999). The friction pendulum
system (FPS) is presently one of widely used sliding isolation systems (Mokha et. al., 1991). The
sliding surface of a FPS isolator is made spherical, so that the gravitational load of the structure
applied on the slider will provide a restoring stiffness that help reduce residual isolator displacement.
However, this restoring stiffness, which is proportional to the curvature of the sliding surface, will
inevitably introduce a constant isolation frequency to the isolated structure. Due to the existence of
this isolation frequency, a resonant problem may occur when the FPS is subjected to a low-frequency
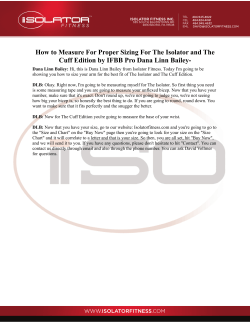
ground excitation. Fig. 1 compares the acceleration frequency response function of a FPS isolated
structure with that of a fixed-base structure. In the figure, the frequencies of the super-structure and the
isolation system are taken to be 1.67 and 0.4 Hz, respectively. Also, the friction coefficient µ of FPS
is assumed to be 0.1 and 0.25. The figure clearly shows that although FPS is able to effectively
suppress the response around the structure frequency 1.67Hz, it also induces sever resonant response
around the isolation frequency 0.4 Hz.
1
Professor, Dept. of Construction Engineering, National Kaohsiung First University of Sci. & Tech., Kaohsiung, Taiwan,
lylu@ccms.nkfust.edu.tw
2
Graduate Student, Dept. of Construction Engineering, National Kaohsiung First University of Sci. & Tech., Kaohsiung,
Taiwan.
3
Graduate Student, Dept. of Construction Engineering, National Kaohsiung First University of Sci. & Tech., Kaohsiung,
Taiwan.
1
A near-fault earthquake usually possesses a long-period pulse-like waveform (Hall et. al., 1995; Chai
and Loh, 2000; Makris and Chang, 2000), which contains strong low-frequency components.
According to the study of Makris and Chang (2000), a near-fault earthquake can be classified into A,
B and C types, depending on the shape of the pulse appearing in its velocity waveform. Recent studies
have shown that when a structure isolated by conventional sliding isolators is subjected to a ground
motion with near-fault characteristics, the base displacement may be considerably amplified due to the
long-period pulse-like wave component possessed in most near-fault earthquakes (Zayas and Low,
2000; Jangid and Kelly, 2001; Lu et. al., 2002; Lu et. al., 2003).
In order to improve sliding isolation technology for structures in near-fault areas, this study aims to
investigate numerically the possibility of using sliding isolators with variable frequency. By varying
the curvature of the concaved surfaces of a sliding isolator, the isolation frequency will become a
function of the isolator displacement, so the low-frequency resonant behavior of a sliding isolation can
be attenuated.
10
Acceleration(m/sec2)
10
10
10
10
4
Maximum Structure Acceleration
µ=0.1
µ=0.25
3
FPS isolated
Fixed
2
Fixed base
1
0
-1
10 -1
10
0
10
Excitation Freq.(Hz)
10
1
Figure 1. Comparison of frequency response functions of structural acceleration
(Structural freq. = 1.67 Hz; Isolation freq. of FPS = 0.4 Hz).
HYSTERETIC BEHAVIOR OF THE ISOLATOR WITH VARIABLE FREQUENCY
In this section, a formula describing the force-displacement relation (hysteretic behavior) of a sliding
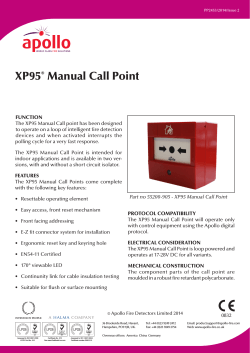
bearing with variable frequency will be derived. As shown in Fig. 2, consider a sliding isolator with a
concaved and axially symmetric sliding surface. Assume that the cross-section of the sliding surface
of the isolator can be expressed by a geometric function y(x) in a x-y coordinates, with the y-axis being
the axis of symmetry and the x-axis being in parallel to the horizontal displacement of the slider. In
Fig. 2, there are four forces interact on the slider. These forces are: P the vertical load applied on the
slider, N the normal contact force, Ff the slider friction force, U the horizontal shear force. The shear
force U is induced by the relative motion between the superstructure and the ground. Also, for the
convenience of derivation, a moving coordinate system denoted by t-n coordinates, which are moving
with the slider, is depicted in Fig. 2. The two axes of the t-n coordinate system are tangent and normal
to the sliding surface, respectively. By neglecting the inertia force of the slider, the force equilibrium
Fn = 0 and
Ft = 0 . By solving
conditions of the slider in the t- and n-direction can be written as
these two simultaneous equations, one may express U and N in terms of P and F f , i.e.,
∑
∑
U ( x) = P y ′( x) + F f 1 + y ′( x) 2
(1)
N ( x) = P 1 + y ′( x) 2 + F f y ′( x)
(2)
2
where θ is the tangent angle of the surface (see Fig.2). Note that in the above equations, the geometric
equation tan θ = y ′( x) has been used. Furthermore, the friction force Ff actually depends on the status
of the isolator motion, which has two possible states, namely, sliding and stick states. If we further
assume that the isolator is under its sliding state, by using Coulomb friction model and Eq. (2) we have
⎛
⎞
1 + y ′( x) 2
⎟
F f ( x) = sgn( x& ) µ N ( x) = sgn( x& ) µ P ⎜
⎜ 1 − sgn( x& ) µ y ′( x) ⎟
⎝
⎠
(3)
where µ denotes the friction coefficient of the sliding interface and sgn( x& ) represents a sign function
of x& . After substituting Ff (x) from Eq. (3) into Eq. (1), the total shear U(x) of an isolator may be
rewritten as
U ( x) = u r ( x) + u f ( x)
(4)
where
u r ( x) = P y ′( x)
(5a)
⎞
⎛
1 + y ′ ( x)
⎟
u f ( x) = sgn( x& ) µ P ⎜⎜
⎟
⎝ 1 − sgn( x& ) µ y ′( x) ⎠
2
(5b)
y(x)
θ (x)
P
n
Sliding surface
Slider
t
Ff
U
x
θ (x)
N
Figure 2. Forces applied on the slider of a sliding isolator with variable curvature.
Eq. (4) is useful in establishing the hysteretic diagram (force-displacement relation) of the isolator.
The terms u r ( x) and uf (x) in Eq. (5) physically represent the restoring force and friction force
components in the total shear U (x). Note that the restoring force u r ( x) in Eq. (5a) is independent
from the friction coefficient. More importantly, u r ( x) provides the re-centering ability for the
isolation system and also produces the isolation frequency. On the other hand, the term uf (x) is a
friction related force and is a function of the frictional coefficient µ , isolator vertical load P, and also
the slope y ′(x) of the sliding surface. Moreover, if the isolator slope and frictional coefficient is much
smaller than one, i.e., y ′( x) << 1 and µ << 1 , uf (x) of Eq. (5b) can be approximated by
u f ( x) ≈ sgn( x& ) µ P
(6)
The instantaneous restoring stiffness kr (x) of the proposed isolator, which is defined as the rate of
change of u r ( x) , can be further computed by taking the derivative of u r ( x) with respect to x, i.e.,
k r ( x) =
du r ( x)
= P y ′′( x)
dx
(7)
3
Moreover, in Eq. (8), by letting P is equal to total weight of the structure, i.e., P = M g (M is structural
mass), the instantaneous isolation frequency ω b (x) of the isolated structure can be computed by
ω b ( x) =
k r ( x)
= g y ′′( x)
M
(8)
The above equations reveal that u r (x) , kr (x) and ω b (x) are all explicit functions of y(x) or its
derivatives. In other words, once the geometric function y(x) of the isolators is determined, one can
immediately calculate u r (x) , kr (x) and ω b (x) by the above three equations. More importantly, the
frequency ω b (x) of the isolation system has become an implicit function of the isolator displacement x.
This is different from a conventional sliding isolation system that usually has a constant frequency.
For this reason, the isolator introduced herein is called a sliding bearing with variable frequency. The
variation of the isolation frequency gives the adaptability of the isolation system. By properly
selecting the geometric function y(x) of the sliding surface, the isolated system may possess favorable
dynamic characteristics for different earthquakes.
POLYNOMIAL FRICTION PENDULUM ISOLATOR (PFPI)
In order to improve the performance of a sliding isolation system, in this paper, a new type of sliding
isolators called “Polynomial Friction Pendulum Isolator (PFPI)” is proposed. The following fifthorder polynomial function has been chosen to define y ′(x ) of the PFPI.
y ' ( x) = u r ( x) / P = ax 5 + cx 3 + ex
(9)
From Eq. (5a), it is known that y ′(x) can be treated as a restoring force u r (x) normalized with respect
to the vertical load P. Similarly, y ′′(x) can be treated as the normalized isolator stiffness, which can
be obtained by substituting Eq. (9) into (7), i.e.
y ′′( x) = k r ( x) / P = 5ax 4 + 3cx 2 + e
(10)
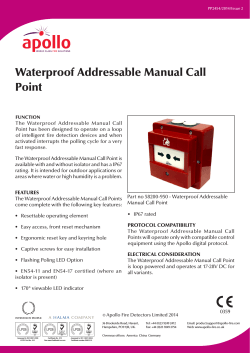
As shown in Fig 3, the fifth-order polynomial function y ′(x) given in Eq. (9) is an odd function. A
curve defined by this function will be passing through the origin and anti-symmetric about the origin.
Also, the curve in Fig 3 has three retroflexion points. Due to the anti-symmetry of the curve, one of the
retroflexion points must be located at the origin. By properly choosing the values of the three
polynomial coefficients a, c and e in Eq. (9), the restoring-force function y ′(x) of a PFPI will possess
a softening section followed by a hardening section (see Fig. 3), when the isolator displacement x is
increased. In the softening section, the normalized stiffness y ′′(x) is decreased, while in the hardening
section the stiffness y ′′(x) is increased. The purpose of the softening section is to mitigate the
acceleration response for an earthquake below the design level; while, the purpose of the hardening
section is to reduce the isolator drift during a sever earthquake, which exceeds the design level, and to
prevent the possible stability problem of the isolation system. In brief, the softening and hardening
sections aim to control the structural acceleration and isolator drift, respectively.
Because the polynomial coefficients a, c, e in Eq. (9) have no engineering meaning, it is better to
replace the coefficients by some parameters that may be more familiar to design engineers. To do so,
let us define three design parameters k 0 , k1 , D1 (see Fig. 3): (1) k 0 is the normalized initial stiffness
at x = 0 , i.e., y" (0) = k 0 . (2) D1 is the critical isolator drift, after which the PFPI system will switch
from the acceleration control to displacement control. Geometrically, this means that x = D1 is a
retroflexion point of the y ′( x) function, i.e., y" ' ( D1 ) = 0 . (3) k1 is the normalized isolator stiffness at
x = D1 , i.e., y" ( D1 ) = k1 . Next, by using the above three conditions, one may obtain the following
relation between the polynomial coefficients and the design parameters, i.e.
a=
− k 0 + k1
− 5( D1 )
4
, c=
2(− k 0 + k1 )
3( D1 ) 2
, e = k0
(11)
4
y ′( x )
Hardening
Softening
k1
k0
x
D1
Figure 3. Normalized restoring force y ′( x) defined by a fifth-order polynomial function.
ms
Super-structure
Base mat
ur(xb)
PFPI
Isolator
xs
ks
cs
mb
xb
uf(xb)
&x&g
(a) Schematic diagram
(b) Mathematical model
Figure 4. Model of structure with PFPI for numerical simulation.
NUMERICAL MODEL FOR STRUCTURE ISOLATED BY PFPI
In this paper, the seismic performance of structures isolated by PFPI variable isolators will be
evaluated numerically. The isolated structural system is schematically shown in Fig. 4(a), where the
super-structure is modeled as a single-DOF system, so the study can be focused on the performance of
the PFPI system itself. For numerical analysis, Fig. 4(a) is further transformed into the mathematical
model shown in Fig. 4(b), where the PFPI system is modeled by the combination of a friction element
and a nonlinear spring with a restoring force ur (x) specified by Eq. (9). The equation of dynamics for
the model of Fig. 4(b) can be expressed in the following state-space form
z& (t ) = A z (t ) + B (u r (t ) + u f (t )) + E &x&g (t )
(12)
where A denotes the system matrix that contains mass, damping and stiffness matrices of the structure,
z (t ) = {x& s , x& b , x s , x b }T the state variables, &x&g (t ) the ground acceleration, B the isolator distribution
matrix, E the excitation distribution matrix. It should be noted that both nonlinear terms u r (t ) and
u f (t ) have been moved to the right-hand side of Eq. (12), so matrix A does not include the restoring
force of the isolation system. The term ur (t) must satisfy Eq. (9), and uf (t) must comply with the force
condition of Coulomb friction, i.e., u f (t ) ≤ µ (m b + m s ) g .
Moreover, in order to deal with the nonlinearity of u r (t ) and u f (t ) more efficiently and accurately, in
the simulation, a numerical procedure, which was modified from the shear-force balanced method
5
(Wang et. al., 1998) and developed based on the discrete-time state-space formulation, was adopted
for the analysis of a PFPI system.
PARAMETRIC STUDY FOR PFPI SYSTEM
In the previous section, it is shown that the PFPI has three design parameters, namely, k 0 , k1 , D1 ,
that define the isolator sliding surface. In this section, the effect of varying these design parameters
will be investigated by a parametric study. Table 1 lists the values of the structural parameters and the
range of the isolator parameters selected for the parametric study. To simplify the problem, for the
time being, the parameter k1 is set to zero. Three values of 0.08, 0.14, 0.2 m are chosen for D1. The
parameter k 0 will be varied from 0.2 to 20 (1/m) that is equivalent to an initial period T0 of 4.49s
down to 0.45s (note that k 0 = 4π 2 /( g T0 2 ) ).
Table 1. Structural properties and range of isolator parameters for parametric study
Structure
Mass
Frequency
Damping
ratio
Parameter value Isolator
ms = 300 t
mb = 100 t
PFPI
ω s = 1.67 Hz
ζs =5%
Parameter range
µ = 0.1
D1 = 0.08, 0.14, 0.2 m
k 0 = 0.2 to 20 (1/m) (T0 = 0.45 to 4.49 s)
k1 = 0 (1/m)
µ = 0.1
FPS
TFPS = 0.5 to 5.5 s
(for comparison)
(equivalent to k FPS = 0.13 to 16.1(1/m))
The time histories of two ground accelerations that possess characteristics of near-fault ground
motions (see Fig. 5) are considered as the input excitations in the parametric study. Fig. 5(a) is an
artificially generated type-B pulse wave defined by Makris and Chang (2000); while, Fig. 5(b) is a real
earthquake record measured in the 1999 Chi-Chi earthquake (Taiwan) by the station TCU075, which
was only 0.43 km away from the tectonic fault. An obvious long-period pulse can be observed in Fig.
5(b) between 5 to 10 seconds. By Makris and Chang’s (2000) classification, the Chi-Chi earthquake
can be classified as a type-B near-fault earthquake with a pulse period of 4.5 seconds, approximately.
Time History of Ground Motion
TCU075 Near Fault
4
Acceleration (m/sec.2)
Acceleration (m/sec.2)
4
2
0
-2
2
0
-2
-4
0
2
4
6
Time (sec.)
8
-4
0
10
(a) Type-B pulse excitation (artificial)
10
20
30
40
Time (sec.)
50
60
70
(b) Chi-Chi earthquake (station TCU075)
Figure 5. Ground accelerations used in simulation.
The results of parametric study are shown in Fig. 6(a) and 6(b), each for a different input ground
motion. The horizontal and vertical axes of the figures represent, respectively, the maximum isolator
displacement and structural acceleration. For the comparison, the response of a FPS of isolation period
TFPS varied between 0.5s and 5.5s is also depicted on the figure. The response of the FPS is shown by
a curve with square marks. It is observed in the figures that when k 0 is increased from 0.2 toward 20
6
(1/m), the response of the PFPI approaches a FPS of a very short period 0.5s. When k 0 is decreased
the acceleration of the PFPI will first drop below that of the FPS, and then exceeds the acceleration of
the FPS system. The shaded areas in Fig. 6 indicate that the reduction on the acceleration by a PFPI is
superior to that by a FPS when an equal isolator displacement is considered. Therefore, the parameters
corresponding to these areas have the preferred values for the PFPI. For D1 = 0.2 m the preferred
value of k 0 is between 0.2 - 6 (1/m), in order to prevent using a too stiff isolation system.
FPS period =
0.5s
1.5s
5.5s
FPS period =
0.5s
1.5s
5.5s
k0 increased
Desirable
Desirable
k0 increased
(a) Type-B pulse excitation (PGA=0.4g)
(b) Chi-Chi earthquake (PGA=0.4g)
Figure 6. Maximum acceleration vs. maximum displacement.
COMPARISON OF THE RESPONSES OF PFPI AND FPS
This section aims to demonstrate the difference between the responses of a structure isolated by PFPI
and FPS. The model of Fig. 4 with the structural parameter values given in Table 1 is used in the
numerical simulation. The parameters for the isolators are taken to be: (i) for PFPI, D1 = 0.2 m,
k 0 = 5 (1/m), k1 = 0 (1/m) and µ = 0.1 ; (ii) for FPS, TFPS = 2.5 s (i.e., k FPS = 0.65 (1/m)) and µ = 0.1 .
The simulated results are compared and discussed below.
(1) Hysteresis loop: Fig. 7(a) compares the hysteresis loop of the PFPI isolator with that of the FPS.
Fig. 7(a) shows that the hysteretic diagram of PFPI does possess a softening section followed by a
hardening section, while the diagram of FPS is a parallelogram. In the softening section of PFPI, the
slope of the restoring force is decreased, while in the hardening section the slope is increased.
(2) Frequency response function: Fig. 7(b) compares the maximum isolator displacement xb ,max as a
function of the excitation frequency ω g for the PFPI and FPS systems. A harmonic ground
acceleration of the form &x&g (t ) = 0.4 g sin ω g t (where ω g can be varied) was imposed to the isolated
structure when Fig. 7(b) was generated. Here, the maximum value xb ,max means the magnitude of a
steady-state response. As expected, Fig. 7(b) shows that for the FPS system, a significant resonant
response for the isolator displacement has occurred at the isolation frequency around 0.4 Hz. On the
other hand, no obvious resonant behavior is observed for the PFPI system. This implies that the
isolator displacement of the PFPI will not be amplified by a low-frequency ground excitation.
(3) Time history response: Fig. 8 compares the time history responses of the PFPI and FPS isolation
systems that are subjected to the type-B pulse acceleration (artificial earthquake) with a pulse period
T p = 2.5 second. On the other hand, Fig. 9 compares the responses due to the Chi-Chi earthquake.
Note that the PGA (peak ground acceleration) of both ground motions has been scaled to 0.4g. From
these two diagrams, it is observed that: (1) as compared with the response of FPS, PFPI considerably
reduces the maximum isolator drift, and at the same time maintains a structural acceleration level
roughly equal to that of FPS. For the earthquakes considered, the isolator drift of PFPI is only about
7
20% of the FPS isolator drift. (2) In Fig. 8, FPS exhibits more obvious oscillation in both acceleration
and displacement responses, due to the pulse excitation.
2
FPS
PFPI
1.5
1
y.(x)
0.5
0
-0.5
-1
-1.5
-2
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Displacement (m)
(a) Hysteresis loop
(b) Frequency response of isolator drift
Figure 7. Comparison of PFPI and FPS.
(a) Isolator displacement
(b) Structural acceleration
Figure 8. Time history responses of PFPI and FPS (Type-B pulse, T p = 2.5 s, PGA=0.4g).
(a) Isolator displacement
(b) Structural acceleration
Figure 9. Time history responses of PFPI and FPS (Chi-Chi earthquake, PGA=0.4g).
8
(4) Maximum response vs. PGA: In order to investigate PFPI behavior when earthquake intensity is
changing, Fig. 10 compares the maximum responses of the PFPI and FPS when the PGA of the type-B
pulse is increased from 0.1 to 1.0g. Same as Fig. 10, Fig. 11 compares the responses due to the ChiChi earthquake. From Fig. 10(a) and 11(a), it is shown that the PFPI induces a much smaller isolator
displacement regardless the PGA values, and is able to very effectively suppresses the isolator
displacement in a sever earthquake. As for the acceleration response, Fig. 10(b) shows that when the
PFPI is subjected to a pure pulse ground acceleration, it maintains roughly the same structural
acceleration as that of FPS when PGA is below 0.5g, but it also induces a higher acceleration when
PGA become larger. On the other hand, Fig. 11(b) shows that when the PFPI is subjected to a real
near-fault earthquake, the PFPI induces roughly the same structural acceleration as that of FPS for all
levels of PGA.
(a) Isolator drift
(b) Structural acceleration
Figure 10. Comparison of maximum responses of PFPI and FPS (Type-B pulse; T p = 2.5 s)
(a) Isolator drift
(b) Structural acceleration
Figure 11. Comparison of maximum responses of PFPI and FPS (Chi-Chi earthquake)
CONCLUSIONS
In order to mitigating the structural response due to earthquakes with near-fault characteristics, a new
type of sliding bearings called Polynomial Friction Pendulum Isolator (PFPI) is proposed in this study.
Different from that of a conventional friction pendulum system (FPS), the sliding surface of a PFPI
isolator is an axially symmetric surface whose cross-sectional geometry is defined by a polynomial
function. As a result, the isolation frequency of the PFPI becomes variable and is a function of the
isolator displacement. The hysteretic equation and the design parameters of the PFPI were derived in
9
this paper, and optimal values of the design parameters were also identified through a parametric study.
The result of numerical simulation has demonstrated that when subjected to a strong near-fault
earthquake, the PFPI system can effectively suppress the isolator displacement without increasing the
acceleration of the super-structure.
ACKNOWLEDGEMENT
This research was sponsored in part by National Science Council of R.O.C. (Taiwan), through Grant
94-2625-Z-327-004. This support is gratefully acknowledged.
REFERENCES
Chai, J. F. and C. H. Loh (2000), Near-fault ground motion and its effect on civil structures, International
workshop on mitigation of seismic effects on transportation structures, July 12-14, Taipei, Taiwan, R.O.C.
70-81.
Hall, J. F, Heaton, T. H., Halling, M. W., and Wald, D. J. (1995), Near-source ground motions and its effects on
flexible buildings, Earthquake Spectra, 11, 569-605.
Jangid, R. S. and J. M. Kelly (2001), Base isolation for near-fault motion, Earthquake Engineering and
Structural Dynamics, 30, 691-707.
Lu, L.-Y. & Yang, Y.-B. (1997), Dynamic Response of Equipment in Structures with Sliding Support,
Earthquake Engineering and Structural Dynamics, 26(1);61-76.
Lu, L.-Y., Shih, M.-H., Chang Chien, C.-S., and Chang, W.-N. (2002), Seismic performance of sliding isolated
structures in near-fault areas, Proceedings of the 7th US National Conference on Earthquake Engineering,
July 21-25, Boston, MA, USA; Session AT-2.
Lu, L.-Y., M. H. Shih, S. W. Tzeng and C. S. Chang Chien (2003), Experiment of a sliding isolated structure
subjected to near-fault ground motion, Proceedings of the 7th Pacific Conference on Earthquake
Engineering, February 13-15, Christchurch, New Zealand.
Makris, N. & Chang, S.-P. (2000), Effect of viscous, visoplastic and friction damping on the response of seismic
isolated structures, Earthquake Engineering and Structural Dynamics, 29, 85-107.
Mokha, A., Constantinous, M. C., Reinhorn, A. M. and Zayas, V. A. (1991), Experimental study of frictionpendulum isolation system, J. of Structural Engineering, ASCE, 117(4), 1201-1217.
Naeim, F. and J. M. Kelly (1999), Design of Seismic Isolated Structures: from theory to practice, John Wiley &
Sons.
Wang, Y. P. L. L. Chung, W. H. Liao (1998), Seismic response analysis of bridges isolated with friction
pendulum bearing, Earthquake Engineering and Structural Dynamics, 27, 1069-1093.
Zayas, V. A and S. S. Low (2000), Seismic Isolation for Strong, Near-field Earthquake Motions, The 12th World
Conference on Earthquake Engineering, No. 0088.
10







© Copyright 2025