
פרק 11 – האינטגרל המשולש - אלון באומן – שיעורים פרטיים ומרתונים
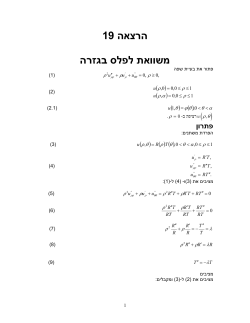
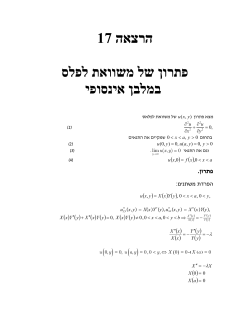
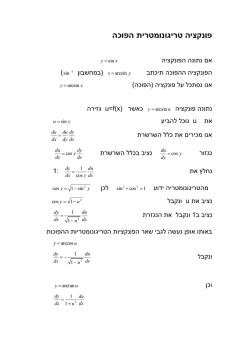
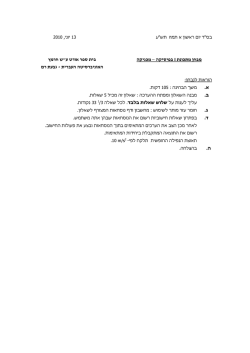
פרק – 11האינטגרל המשולש 𝑧 𝑓 𝑥, 𝑦,המוגדרת בתחום זה .נגדיר ריבוע החוסם את יהי 𝐷 תחום במרחב ותהי פונקציה התחום 𝐷 שצלעותיו מקבילות לצירים ונחלק אותו באופן הבא :כמות הישרים המקבילים לציר ה 𝑥 -זהה לכמות הישרים המקבילים לציר ה 𝑦 -וזהה לכמות הישרים המקבילים לציר 𝑧 כך שהקטעים שנקבעים על הצירים יהיו מאורך שווה עבור כל ציר .חלוקה כזו תיתן שאם כמות הישרים גדול המאוד אז תת המלבנים שיגדירו יהיו בעלי נפח קטן מאוד. נתייחס לריבועים המוכלים ב 𝐷 -ונניח כי קיימים 𝑛 מלבנים כאלה .נבחר נקודה כלשהי בריבוע ה 𝑖 -ונסמן אותה ואת נפח המלבן ב ∆𝑉𝑖 -כך שמתקיים.∆𝑉𝑖 = 𝑥𝑖 ∙ 𝑦𝑖 ∙ 𝑧𝑖 : 𝑖𝑧 𝑥𝑖 , 𝑦𝑖 , נניח כי קיים מספר 𝐼 כך שלכל 𝜀 > 0קיים 𝑛0 ∈ ℕכך שאם 𝑛 > ,𝑛0אם מחלקים את 𝐷 כפי שהוסבר ,עבור כל נקודה נקבל𝑥𝑖 , 𝑦𝑖 , 𝑧𝑖 ∆𝑉𝑖 − 𝐼 < 𝜀 : 𝑛 𝑓 𝑖=1 .במקרה זה אומרים כי הפונקציה 𝑧 𝑓 𝑥, 𝑦,אינטגרבילית בתחום 𝐷 ונגדיר𝑓 𝑥, 𝑦, 𝑧 𝑑𝑥𝑑𝑦𝑑𝑧 = 𝐼 : ובסימון אחר𝑓 𝑥, 𝑦, 𝑧 𝑑𝑉 : 𝐷 , 𝐷 . משפט אם פונקציה 𝑧 𝑓 𝑥, 𝑦,אינטגרבילית ב.𝐷 - 𝑧 𝑓 𝑥, 𝑦,רציפה בתחום 𝐷 אזי משפט – תכונות אינטגרל משולש .1אם 𝑧 𝑓 𝑥, 𝑦,ו- 𝑧 𝑔 𝑥, 𝑦,אינטגרבילית ב ,𝐷 -אזי 𝑧 𝑎𝑓 𝑥, 𝑦, 𝑧 + 𝑏𝑔 𝑥, 𝑦,אינטגרבילית ב 𝐷 -לכל 𝑎, 𝑏 ∈ ℝומתקיים: 𝑏 𝑓 𝑥, 𝑦, 𝑧 𝑑𝑥𝑑𝑦𝑑𝑧 + 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑔 𝑥, 𝑦, 𝐷 .2אם 𝑎 = 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑎𝑓 𝑥, 𝑦, 𝑧 + 𝑏𝑔 𝑥, 𝑦, 𝐷 𝐷 𝑧 𝑓 𝑥, 𝑦,אינטגרבילית בתחומים 𝐷1ו 𝐷2 -אזי 𝑧 𝑓 𝑥, 𝑦,אינטגרבילית בתחום ( 𝐷 = 𝐷1 ∪ 𝐷2כאשר ∅ = )𝐷1 ∩ 𝐷2ומתקיים: 𝑓 𝑥, 𝑦, 𝑧 𝑑𝑥𝑑𝑦𝑑𝑧 + 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝐷2 .3אם 𝑧 𝑓 𝑥, 𝑦,ו- = 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝐷 𝐷1 𝑧 𝑔 𝑥, 𝑦,אינטגרבילית ב 𝐷 -ולכל 𝐷 ∈ 𝑧 𝑥, 𝑦, מתקיים 𝑧 𝑓 𝑥, 𝑦, 𝑧 ≤ 𝑔 𝑥, 𝑦, אז מתקיים: ≤ 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑔 𝑥, 𝑦, 𝐷 © באומן אלון – שיעורים פרטיים ומרתונים 054-5-290106 1 𝐷 alonbaumann.math@gmail.com חישוב האינטגרל המשולש נחלק את חישוב האינטגרל המשולש לשני תחומים בסיסיים: .1אינטגרל משולש בתיבה משפט אם 𝑧 𝑓 𝑥, 𝑦,רציפה בתיבה 𝑙 ( 𝐷 = 𝑎, 𝑏 𝑥 𝑐, 𝑑 𝑥 𝑘,כלומר 𝑏 ≤ 𝑥 ≤ 𝑎 )𝑘 ≤ 𝑧 ≤ 𝑙 ,𝑐 ≤ 𝑦 ≤ 𝑑 ,אז מתקיים: 𝑙 𝑙 = 𝑦𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑏 𝑑 𝑥𝑑 = 𝑦𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑐 𝑏 𝑧𝑑 𝑘 𝑙 𝑥𝑑 𝑘 𝑧𝑑 𝑎 𝑙 = 𝑧𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑎 𝑏 𝑘 𝑑 𝑦𝑑 𝑘 𝑙 = 𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑏 𝑧𝑑 𝑥𝑑 𝑐 𝑑 𝑦𝑑 𝑘 𝑎 = 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑎 𝑙 𝑏 = 𝑧𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑐 𝑑 𝑥𝑑 𝑘 𝑏 𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑦𝑑 = 𝑎 𝑑 𝑦𝑑 𝑎 𝐷 𝑐 𝑙 𝑧𝑑 𝑐 = 𝑘 .2אינטגרל משולש בתחום נורמלי משפט אם 𝑧 𝑓 𝑥, 𝑦,רציפה בתחום מתקיים: 𝑦 𝑥, 𝑦, 𝑧 𝑎 ≤ 𝑥 ≤ 𝑏, 𝑔1 𝑥 ≤ 𝑦 ≤ 𝑔2 𝑥 , 1 𝑥, 𝑦 ≤ 𝑧 ≤ 2 𝑥, 𝑧𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑦 2 𝑥, 𝑦𝑑 𝑦 1 𝑥, 𝑥 𝑔2 = 𝐷 אזי 𝑏 𝑥𝑑 𝑥 𝑔1 = 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑎 באופן כללי יותר ניתן להגדיר: 𝑦 𝑥, 𝑦, 𝑧 ∈ 𝐷1 , 1 𝑥, 𝑦 ≤ 𝑧 ≤ 2 𝑥, 𝐷 𝑧 𝑥, 𝑦, =𝐷 כאשר 𝐷1הוא ההיטל של 𝐷 על המישור 𝑦 𝑥 −אזי מתקיים: 𝑦𝑑𝑥𝑑 𝑧𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑦 2 𝑥 , 𝑦 1 𝑥, = 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝐷 𝐷 )Z=f(x,y )h2(x,y D )h1(x,y y a )g2(x D1 )g1(x b x © באומן אלון – שיעורים פרטיים ומרתונים 054-5-290106 2 alonbaumann.math@gmail.com דוגמא נחשב את האינטגרל 𝑉𝑑 −3 𝑧1+𝑥+𝑦+ 𝐷 כאשר 𝐷 הוא גוף המוגבל ע"י מישורי הצירים והמישור .𝑥 + 𝑦 + 𝑧 = 1 כדי לשרטט את 𝐷 נחשב את היטל המישור 𝑥 + 𝑦 + 𝑧 = 1על המישורים 𝑦 𝑦 − 𝑧 ,𝑥 −ו:𝑥 − 𝑧 - אם 𝑧 = 0ונקבל - 𝑦 = −𝑥 + 1ישר זה הוא החיתוך של המישור 𝑥 + 𝑦 + 𝑧 = 1עם המישור 𝑦 .𝑥 − אם 𝑦 = 0ונקבל - 𝑧 = −𝑥 + 1ישר זה הוא החיתוך של המישור 𝑥 + 𝑦 + 𝑧 = 1עם המישור 𝑧 .𝑥 − אם 𝑥 = 0ונקבל - 𝑧 = −𝑦 + 1ישר זה הוא החיתוך של המישור 𝑥 + 𝑦 + 𝑧 = 1עם המישור 𝑧 .𝑦 − שרטוט התחום 𝐷: z z=-y+1 z=-x+1 y y=-x+1 x ולכן: = 𝑧𝑑 −3 −𝑥+1 𝑦1−𝑥− 𝑦𝑑 𝑧1+𝑥+𝑦+ 𝑥𝑑 0 −2 = 𝑦𝑑 1 5 ln 2 − 2 16 1 = 0 1 𝑦1+𝑥+ − + 8 2 −𝑥+1 0 0 = 0 1 3 1 1 𝑥2 3 1 𝑥− + = 𝑥𝑑 𝑥 − 𝑥 + ln 1 + 8 𝑥8 2 1+ 16 8 2 © באומן אלון – שיעורים פרטיים ומרתונים 0 𝑦−2 1−𝑥− 1 𝑥𝑑 1 054-5-290106 3 0 𝑥−1 1− 1 𝐷 𝑧1+𝑥+𝑦+ −2 = 0 = 𝑉𝑑 −3 𝑧1+𝑥+𝑦+ 0 −𝑥+1 𝑦𝑑 1 𝑥𝑑 0 1 𝑦1+𝑥+ 𝑑𝑥 − 𝑦 + 8 −2 = 0 1 = 0 alonbaumann.math@gmail.com החלפת משתנים כאשר תחום האינטגרציה 𝐷 אינו תיבה או נורמלי יש לבצע החלפת משתנים. הגדרה – החלפת משתנים החלפת משתנים היא העתקה 𝜑: 𝐻 ⊆ ℝ3 → ℝ3כאשר 𝑤 𝜑 𝑢, 𝑣, 𝑤 = 𝑥 𝑢, 𝑣, 𝑤 , 𝑦 𝑢, 𝑣, 𝑤 , 𝑧 𝑢, 𝑣, המוגדרת בתחום פתוח 𝑈 המכיל את 𝐻 ומקיימת: 𝑤 ,𝑥 𝑢, 𝑣, .1הפונקציות 𝑤 𝑦 𝑢, 𝑣,ו- 𝑤 𝑧 𝑢, 𝑣,בעלות נגזרות חלקיות רציפות מסדר ראשון ב. 𝑈 - .2הפונקציה 𝑤 𝜑 𝑢, 𝑣,היא חד-חד-ערכית .3היעקוביאן: 𝑤𝑥 𝑦𝑤 ≠ 0 𝑤𝑧 𝑣𝑥 𝑣𝑦 𝑣𝑧 𝑢𝑥 𝑢𝑦 = 𝑢𝑧 𝑧𝐷 𝑥 ,𝑦, 𝑤𝜑 𝑢,𝑣, = 𝑤 𝐽 𝑢, 𝑣,לכל 𝑈 ∈ 𝑤 𝑢, 𝑣, משפט בתנאיי ההגדרה הקודמת ,קיימת העתקה הפוכה הפונקציות 1 𝑤𝐽 𝑢,𝑣, 𝑤 ,𝑥 𝑢, 𝑣, = 𝑧 𝐽 𝑥, 𝑦,לכל 𝑤 𝑦 𝑢, 𝑣,ו- 𝑧 𝑥, 𝑦, 𝑧 = 𝑢 𝑥, 𝑦, 𝑧 , 𝑣 𝑥, 𝑦, 𝑧 , 𝑤 𝑥, 𝑦, −1 𝜑 כאשר 𝑤 𝑧 𝑢, 𝑣,בעלות נגזרות חלקיות רציפות ומתקיים: 𝑧 𝑥, 𝑦, משפט אם 𝑓 אינטגרבילית בתחום חסום וסגור 𝐷 בעך נפח 𝑉 שתמונתו 𝐻 היא גם נפח אזי מתקיים: 𝑤𝑑𝑣𝑑𝑢𝑑 𝑤 𝐽 𝑢, 𝑣, = 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝑧 𝑓 𝑥 𝑢, 𝑣, 𝑤 , 𝑦 𝑢, 𝑣, 𝑤 , 𝑤 𝑥, 𝑦, 𝐻 © באומן אלון – שיעורים פרטיים ומרתונים 054-5-290106 4 𝐷 alonbaumann.math@gmail.com החלפות משתנים נפוצות: .1החלפת משתנים גלילית 𝜃 𝑠𝑜𝑐𝑟 = 𝑧 𝑥 𝑟, 𝜃, z נגדיר העתקה ע"י , 𝑥, 𝑦, 𝑧 → 𝑟𝑐𝑜𝑠 𝜃, 𝑟𝑠𝑖𝑛 𝜃, 𝑧 :כך ש𝑦 𝑟, 𝜃, 𝑧 = 𝑟𝑠𝑖𝑛 𝜃 - 𝑧 = 𝑧 𝑧 𝑟, 𝜃, )P(x,y,z ומתקיים: 𝜋𝑥, 𝑦, 𝑧 |𝑟 > 0,0 ≤ 𝜃 ≤ 2 0 0 =𝑟≠0 1 𝜃 𝑛𝑖𝑠𝑟− 𝜃 𝑠𝑜𝑐𝑟 0 𝑧𝑥 𝜃 𝑠𝑜𝑐 = 𝑧𝑦 𝜃 𝑛𝑖𝑠 𝑧𝑧 0 =𝑈 𝜃𝑥 𝜃𝑦 𝜃𝑧 y r θ 𝑟𝑥 =𝐽 𝑟𝑦 = 𝑧 𝜑 𝑟, 𝜃, 𝑟𝑧 𝑧 𝐷 𝑥, 𝑦, x חישוב האינטרגל יתבצע באופן הבא: 𝑧𝑑 𝑟 𝑧 𝑓 𝑟𝑐𝑜𝑠 𝜃, 𝑟𝑠𝑖𝑛 𝜃, 𝜃𝜓 2 𝑟, 𝑟𝑑 𝜃𝜓 1 𝑟, 𝜃 𝑟2 𝜃𝑑 𝜃 𝑟1 𝜃2 = 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝐷 𝜃1 .2החלפת משתנים כדורית 𝜑 𝑥 𝑟, 𝜃, 𝜑 = 𝑟𝑐𝑜𝑠𝜃 sin נגדיר העתקה ע"י , 𝑥, 𝑦, 𝑧 → 𝑟𝑐𝑜𝑠𝜃 sin 𝜑 , 𝑟𝑠𝑖𝑛 𝜃 sin 𝜑 , 𝑟𝑐𝑜𝑠𝜑 :כך ש𝑦 𝑟, 𝜃, 𝜑 = 𝑟𝑠𝑖𝑛 𝜃 sin 𝜑 - 𝜑𝑠𝑜𝑐𝑟 = 𝜑 𝑧 𝑟, 𝜃, ומתקיים: 𝜋𝑥, 𝑦, 𝑧 |𝑟 > 0,0 ≤ 𝜃 ≤ 2𝜋, ,0 ≤ 𝜑 ≤ 2 𝜑𝑠𝑜𝑐𝜃 𝑠𝑜𝑐𝑟 𝑟𝑠𝑖𝑛 𝜃𝑐𝑜𝑠𝜑 = 𝑟 2 𝑠𝑖𝑛𝜑 ≠ 0 𝜑𝑠𝑜𝑐𝑟− 𝜑 −𝑟𝑠𝑖𝑛 𝜃 sin 𝜑𝑠𝑜𝑐𝜃 𝑠𝑜𝑐𝑟 0 𝜑𝑥 𝜑𝑠𝑜𝑐𝜃 𝑠𝑜𝑐 𝜑 𝑦 𝜑 = 𝑠𝑖𝑛 𝜃 sin 𝜑𝑧 𝜑𝑠𝑜𝑐 =𝑈 𝜃𝑥 𝜃𝑦 𝜃𝑧 z 𝑟𝑥 =𝐽 𝑟𝑦 = 𝜑 𝜑 𝑟, 𝜃, 𝑟𝑧 𝑧 𝐷 𝑥, 𝑦, )P(x,y,z φ y r θ x חישוב האינטרגל יתבצע באופן הבא: 𝑧𝑑 𝜑𝑛𝑖𝑠 𝑓 𝑟𝑐𝑜𝑠 𝜃, 𝑟𝑠𝑖𝑛 𝜃, 𝑧 𝑟 2 𝜃𝜓 2 𝑟, 𝜃𝜓 1 𝑟, © באומן אלון – שיעורים פרטיים ומרתונים 𝑟𝑑 𝜃 𝑟2 𝜃 𝑟1 𝜃𝑑 𝜃2 𝜃1 054-5-290106 5 = 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝐷 alonbaumann.math@gmail.com דוגמא נחשב את האינטגרל 𝑧𝑑𝑦𝑑𝑥𝑑 𝑥 2 𝑧 = 9 − 𝑥 2 + 𝑦2 כאשר 𝐷 הוא גוף החסום ע"י המשטחים 𝐷 ו. 𝑧 = 0 - הגוף 𝐷: היטל הגוף 𝐷 על המישור 𝑦 :𝑥 − נבצע החלפת משתנים גלילית כאשר: 0≤𝑟≤3 z y 𝜋0 ≤ 𝜃 ≤ 2 9 3 0 ≤ 𝑧 ≤ 9 − 𝑥 2 + 𝑦2 = 9 − 𝑟2 D x 3 3 y 3 x = 𝑧𝑑 𝜃 𝑟 3 �𝑐𝑜𝑠 2 9−𝑟 2 0 3 9𝑟 4 𝑟 6 𝜃 𝑠𝑜𝑐 𝜃𝑑 − 4 6 2 = 0 3 𝑟𝑑 𝜋2 𝜋2 𝜃𝑑 0 5 = 𝑧𝑑 𝑟 𝜃 𝑟 2 �𝑐𝑜𝑠 2 0 3 0 2 3 = 𝑟𝑑 𝑟 �𝑐𝑜𝑠 𝜃 9𝑟 − 0 𝜋2 𝜋= 60.75 0 9−𝑟 2 𝜋2 𝜃𝑑 0 = 054-5-290106 6 𝜃𝑑 0 2 0 2 𝐷 3 3 𝜋2 𝑟 𝑑𝑟 𝑟 �𝑐𝑜𝑠 𝜃 9 − 0 𝜃1 + cos 2 𝜃sin 2 𝑑𝜃 = 30.375 𝜃 + 2 2 © באומן אלון – שיעורים פרטיים ומרתונים 3 𝑟𝑑 𝜋2 = 𝑧𝑑𝑦𝑑𝑥𝑑 𝑥 2 𝜃𝑑 0 𝜋2 0 𝑐𝑜𝑠 2 𝜃𝑑𝜃 = 60.75 = 0 𝜋2 = 60.75 0 alonbaumann.math@gmail.com שימושים של אינטגרל משולש .1חישוב נפחים – נפח של גוף 𝐺 נתון ע"י: =𝑉 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑓 𝑥, 𝑦, 𝐷 .2מסה של גוף – אם לגוף יש צפיפות שאינה קבועה במרחב 𝐷 ,נגדיר פונקציית צפיפות התלויה בקואורדינטות 𝑥 𝑦 ,ו 𝑧 -ע"י: נתונה ע"י: 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝜌 𝑥, 𝑦, 𝑧 𝜌 𝑥, 𝑦,כך שהמסה הכוללת שלו =𝑀 𝐷 מרכז הכובד של הגוף מתקבל בנקודה 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑥𝜌 𝑥, 𝑦, 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝜌 𝑥, 𝑦, 𝐷 ; = 𝑥0 𝐷 𝑥0 , 𝑦0 , 𝑧0 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑦𝜌 𝑥, 𝑦, 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝜌 𝑥, 𝑦, 𝐷 כאשר: = 𝑦0 ; 𝐷 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝑧𝜌 𝑥, 𝑦, 𝑧𝑑𝑦𝑑𝑥𝑑 𝑧 𝜌 𝑥, 𝑦, 𝐷 = 𝑧0 𝐷 תרגילים .1חשב 𝑧𝑑𝑦𝑑𝑥𝑑 𝑦𝑥 𝑛𝑖𝑠𝑧𝑥 .2חשב 𝑉𝑑𝑦3 כאשר 𝐷 ,0 ≤ 𝑦 ≤ 𝜋 ,0 ≤ 𝑧 ≤ 1 1 1 2 3 ≤ 𝑥 ≤ | 𝑧 𝑥, 𝑦, = 𝐷. כאשר 𝐷 מוגבל ע"י הגליל 𝑧 = 1 − 𝑥 2והמישורים 𝑦 = 0 ,𝑧 = 0 𝐷 ו. 𝑧 + 𝑦 = 2 - .3חשב 𝑧𝑑𝑦𝑑𝑥𝑑𝑧𝑦𝑥 𝐷 כאשר 𝑥, 𝑦, 𝑧 |𝑥 2 + 𝑥 2 + 𝑥 2 ≤ 0, 𝑥 ≥ 0, 𝑦 ≥ 0 ≥ 𝑧 ≥ 0 = 𝐷. פתרונות .1 1 12 + 3−2 𝜋4 .2 368 70 .3 1 36 © באומן אלון – שיעורים פרטיים ומרתונים 054-5-290106 7 alonbaumann.math@gmail.com


















© Copyright 2025