
Learning stochastic timed automata from sample executions Andr´ e de Matos Pedro
Learning stochastic timed automata from sample
executions
Andr´e de Matos Pedro1 , Paul Andrew Crocker2 and Sim˜ao Melo de Sousa3?
1
2
University of Minho, Braga, Portugal,
pg15753@alunos.uminho.pt,
IT - Instituto de Telecomunica¸co
˜es, University of Beira Interior, Covilh˜
a, Portugal,
crocker@ubi.pt
3
LIACC - Laborat´
orio de Inteligˆencia Artificial e Ciˆencia de Computadores,
University of Beira Interior, Covilh˜
a, Portugal,
desousa@ubi.pt
Abstract. Generalized semi-Markov processes are an important class of
stochastic systems which are generated by stochastic timed automata. In
this paper we present a novel methodology to learn this type of stochastic
timed automata from sample executions of a stochastic discrete event
system. Apart from its theoretical interest for machine learning area, our
algorithm can be used for quantitative analysis and verification in the
context of model checking. We demonstrate that the proposed learning
algorithm, in the limit, correctly identifies the generalized semi-Markov
process given a structurally complete sample. This paper also presents a
Matlab toolbox for our algorithm and a case study of the analysis for a
multi-processor system scheduler with uncertainty in task duration.
1
Introduction
Stochastic processes are commonly used as an approach to describe and make
a quantitative evaluation of more abstract models which may be described by a
high-level specification. When a model is evaluated we can use it for the design
phase and subsequently make an implementation. However, even if a model is
validated this does not imply that the implementation is in conformity with the
model. This is normally due to bugs in the implementation, wrong interpretation of the model, or possibly, wrong approximations in the construction of the
stochastic model. Unfortunately techniques for discovering these errors such as
testing are unlikely to be sufficient due to the difficulty of achieving a complete
or total coverage.
This paper is concerned with how these models can be derived from sample
executions provided by an implementation in order to verify them. There are
several learning algorithms for learning probabilistic and stochastic languages
[3,13,20], including a learning algorithm for continuous-time Markov processes
(CTMP) [19], but there is no algorithm in the case of processes that do not hold
?
This work was supported
CCO/101904/2008).
in
part
by
the
FCT
CANTE
project
(Refa PTPC/EIA-
the Markov property such as generalized semi-Markov processes (GSMP) [10].
Thus, the learning of stochastic timed automata covered in this paper falls in
the category of language identification [2,17,1]. For most of the methods in this
category, the identified stochastic languages are inferred from a set of sample
executions, i.e., these samples are a particular multi-set of the original language
to identify, and the inference has as target the identification of the language in
the limit, i.e., if the number of samples tends towards infinity then the learned
language will converge to the original language that generated the sample [11].
Learning of stochastic languages essentially follows a common method, firstly
establishing an equivalent relation between the states, then constructing a prefix tree from samples provided by the original stochastic language, and lastly
describing an algorithm for the merge of equivalent states which is called state
merge.
In this paper, we address the problem of learning generalized semi-Markov
processes that are the most known extensive stochastic processes when lifetimes
can be governed by any continuous probabilistic distributions [7]. From classical Markov processes, exponential probability distributions are not sufficient to
model the lifetime of a product such as an electronic component [16] or even
model a computer process [12]. The use of generalized semi-Markov processes
may cover a wider set of problems however they are more complex and analytically intractable.
1.1
Contribution of the paper
The learning algorithm we shall present infers a GSMP model from a given set
of trajectories and therefore must be capable of inferring the model by running
the deployed system in a test phase and of learning trajectories according to the
observed distributions. The learned stochastic timed automaton that is generated
by a GSMP is a model that can be used by existing statistical model-checkers
[15,23,22,5] and by the existing performance evaluation tools for further analysis
and thereby ultimately helping to find bugs in the post-implementation phase.
Learning algorithm for GSMP may also potentially be used to perform automatic
verification for stochastic discrete event systems.
In addition we also establish the correctness of our algorithm. We ensure
that, in the limit, when the samples grow infinitely the learned model converges
to the original model. Thus, a set of conditions like the definition of inclusion of a
prefix tree in a GSMP have to be ensured as well as the definition of probability
measure of paths.
1.2
Structure of the paper
In section 2 some preliminary definitions are given in order to establish the learning algorithm detailed in section 3. In section 4 we demonstrate the correctness
of our algorithm. In section 5, the tool and a practical application are presented.
In the final section 6 we give our conclusions and discuss directions for further
work.
2
Preliminaries
In order to formulate the next notations we describe the concept of finite
path that is established by a prefix,
σ≤τ = {s0 , he1 , t1 i , s1 , he2 , t2 i , ..., sk , hek+1 , tk+1 i}
based on the infinite sequence σ = {s0 , he1 , t1 i , s1 , he2 , t2 i , · · · } of a GSMP,
where
sk is a state, ek is an event, tk is the holding time of the event ek , and
Pk+1
τ = i=1 ti is the path duration upon k. A set of paths with prefix p is denoted
by P ath(p), where p shall be σ≤τ . Some notation will now be introduced to
describe the structure of the algorithm. The definitions are based on symbol
(’k’) that symbolizes a path with respect to an element of a particular set (of
states X , of events E or of holding times G) and brackets (’[’;’]’) a sequential
identification, as follows: σkX [s, i] is the ith state of the state sequence that
begins in state s, σkE [s, i] is the ith event of the event sequence that begins in
state s, σkG [s, i] is the ith holding time of the event sequence (σkE [s, i]) that
begin in s state, η(σkE [s, i]) = σkX [s, i − 1] is a function that returns the state
associated to an event ei , ε(σkX [s, i]) = σkE [s, i + 1] is a function that given
a state of a path returns its associated event, and δ(σkE [s, i]) = σkG [s, i] is
a function that given an event σkE [s, i] returns its holding time σkG [s, i]. A
sequence of events he1 , e2 , e3 , . . . , ek i produced by the prefix tree that accepts
the prefix σ≤τ is denoted by σ≤τ kE .
A prefix tree (denoted P t) that has an acceptor P ath(σ≤τ ) (a set of paths
with prefix σ≤τ ), is a tree
P t(P ath(σ≤τ )) = (F, Q, ρ, %, δ)
where F is a set of leaf nodes of the prefix tree (i.e., F = P ath(σ≤τ kE )), Q
is the set of nodes of the prefix tree composed by the sequence of events from
P ath(σ≤τ kE ) (i.e., Q represents all accepted sequences in the prefix tree), ρ :
Q → [0, 1] is the function that associate the expectation value for each node n ∈
Q, % : Q → R≥1 ×...×R≥1 is the function that associate each node with a n-tuple
of clock values, and δ : Q → Q ∪ ⊥ is the transition function which have the following definition, δ(s, λ) = s where λ is the empty string and s is the reference
point (where all samples are measured), δ(s, e) =⊥ if δ(s, e) is not defined, and
δ(s, xe) = δ(δ(s, x), e), where x ∈ Q and e ∈ E, δ(s, xe) =⊥ if δ(s, x) =⊥
or δ(δ(s, x), e) is undefined.
A generalized semi-Markov process is a stochastic process {X(t)} with state
space X, generated by a stochastic timed automaton (sta, for short),
sta = (X , E, Γ , p, p0 , G)
where X is a finite state space, E is a finite event set, Γ (x ) is a set of feasible
or enabled events, defined for every x ∈ X , with Γ (x ) ⊆ E, p(x0 ; x, e0 ) is a state
transition probability (x0 to x given event e0 ) defined for every x, x0 ∈ X and e0 ∈
E such that ∀e0 ∈
/ Γ (x )p(x 0 ; x , e 0 ) = 0 , p0 (x) is the probability mass function
(pmf ) P r[X0 = x], x ∈ X of the initial state X0 , and finally G = {Gi : i ∈ E} is
a stochastic clock structure where Gi is a cumulative distribution function (cdf )
for each event i ∈ E.
The probability measure µ for a cylinder set composed by a prefix σ≤τ ,
C (σ≤τ , hEk , Yk∗ i , Xk , ..., Xn−1 , hEn , Yn∗ i , Xn ) accordingly to [23], can be defined
recursively as
µ(C(σ≤τ , hEk , Yk∗ i , Xk , ..., hEn , Yn∗ i , Xn )) = Pe (s0 ; σ≤τ ) · He (t; ·, σ≤τ ) ·
∗
µ(C(σ≤τ ⊕ (he, ti , s0 ) , Ek+1 , Yk+1
, Xk+1 , ..., Xn−1 , hEn , Yn∗ i , Xn ))
where the recursive base case is µ(C(s0 , hE1 , Y1∗ i , X1 , ..., hEn , Yn∗ i , Xn )) = 1,
Pe (s0 ; σ≤τ ) is the next-state probability transition matrix given an event e, and
He (t; ·, σ≤τ ) is the density function of triggering the event e upon t time units.
The enabled events in a state race to trigger first, the event that triggers first
causes a transition to a state s0 ∈ X according to the next-state probability matrix for the triggering event. The GSMP is considered as analytically intractable
and the probability measure formulation is not at all intuitive.
3
Learning stochastic timed automata
We shall now present a novel algorithm for learning GSMP from sample
executions (fully detailed in [6,7]), where the GSMP are processes generated by
stochastic timed automata. In order to ensure the correctness of our algorithm,
we define first an inclusion relation between the prefix tree and the sta. Next,
we define the similarity relation between the states, and lastly we describe the
algorithm for the merge of compatible states which is commonly called state
merge.
3.1
The inclusion relation and the state relation
Before introducing the definitions (1) and (2), we need to define two auxiliary
functions to simplify the notation of the relation between paths and the prefix
tree, as follows:
– τ (s, x) gives the set of feasible events of a given event sequence x from a
prefix tree P t(P ath(σ≤τ )), {y ∈ E | δ(δ(s, x), y) 6=⊥}, for instance, from a
set of sequences {x a, x b, ...} we get {a, b, ...}, and
– ν(σkX [s, i]) maps a state σkX [s, i] to u, where u ∈ Q is a sequence of events
accepted by the prefix tree P t(P ath(σ≤τ )).
One says that a prefix tree P t(P ath(σ≤τ )) is a particular case of a GSMP, or
in other words a sta. However, only the relation between the data structures is
ensured with this definition, we shall need to establish a correction of the state
merge algorithm as well (as we will see later).
Definition 1. The prefix tree P t(P ath(σ≤τ )) = (F, Q, ρ, %, δ), denoted P tsta,
for a set of multiple paths P ath(σ≤τ ) is a particular sta,
P tsta(P ath(σ≤τ )) = (X , E, Γ , p, p0 , G)
where X = Q; E is the set of single and unique events in the F set;
Γ (si ) = τ (s, ν(si )); p(s0 ; s, e∗ ) = 1 if δ(ν(s), e∗ ) 6=⊥ and ν(s0 ) 6=⊥, otherwise
p(s0 ; s, e∗ ) = 0; p0 (s) = 1; and G is a set of distributions estimated by sample
clocks associated on each event, given by the function %.
The P tsta(P ath(σ≤τ )) is a GSMP consistent with the sample in P ath(σ≤τ ). For
all paths with prefix σ≤τ there exists a corresponding execution in the GSMP
that produces the same path.
Now, we introduce the notion of a stable equivalence relation that establishes
the similarity between states. This relation, that is applied statistically, allows
the creation of a more abstract model from a set of paths P ath(σ≤τ ). The size
of the model at each equivalence between states is reduced.
Definition 2. Let M = (X , E, Γ , p, p0 , G) be a sta, a relation R ⊆ X × X
is said to be a stable relation if and only if any s, s0 have the following three
properties,
|Γ (s)| = |Γ (s 0 )|
(1)
there is a one to one correspondence f between Γ (s) and Γ (s 0 ),
if ∃e ∈ E and ∃ n ∈ X such that p(n; s, e) > 0, then
0
0
0
0
(2)
0
∃ n ∈ X such that p(n ; s , f (e)) > 0, G(s, e) ∼ G(s , f (e)), and (n, n ) ∈ R
and
if ∃e ∈ E and ∃n, n0 ∈ X such that n 6= n0 , p(n; s, e) > 0 and
p(n0 ; s, e) > 0 then p(n; s, e) ≈ p(n; s0 , e) and p(n0 ; s, e) ≈ p(n0 ; s0 , e)
(3)
where |Γ (s)| is the number of active events in the state s, p is a probabilistic
transition function, G is a probability distribution function, and the tilde (∼)
and double tilde (≈) notations denote ”with same distribution” and ”with same
probability” respectively. Two states s and s0 of M are said equivalent s ≡ s0 if
and only if there is a stable relation R such that (s, s0 ) ∈ R.
A concrete example is now described for the application of the definition (2). For
instance, suppose that we have |Γ (s)| = |Γ (s 0 )| = 2, Γ (s) = {a, b}, and Γ (s 0 ) =
{c, d }. The equation (1) is trivially satisfied, i.e., the feasible event set have the
same size. However, the equation (2) and (3) are not trivially satisfied. To be
satisfied we need to conclude that G(s, a) ∼ G(s0 , c) and G(s, b) ∼ G(s0 , d), or
G(s, a) ∼ G(s0 , d) and G(s, b) ∼ G(s0 , c) is true, if G(s, a) ∼ G(s, b), G(s, a) ∼
G(s0 , c) or G(s, a) ∼ G(s0 , d) then p(n; s, a) ≈ p(n0 ; s0 , b), p(n; s, a) ≈ p(n0 ; s0 , c),
p(n000 ; s, a) ≈ p(n000 ; s0 , d) respectively, otherwise a test for two Bernoulli distributions p is not necessary [3], and all states reachable by s and all states reachable
by s0 must also form a stable relation, i.e., the next states of (s, s0 ) also have to
satisfy these three properties.4
3.2
Testing statistically the similarity of states
The similarity test follows the same scheme of algorithms RPNI [17] and ALERGIA [3], except for: the compatible function which incorporates a different statistical test structure, there is an estimator for unknown new clocks, and there
is an event distribution estimator.
4
In the definition (2) the real event identifiers are not necessary but we need to know
that the sets of feasible events have associated for each event the same distribution.
Algorithm 1: Testing statistically the similarity of states (T3S)
input : A set of paths with prefix σ≤τ , P ath(σ≤τ ), and a type I error α between [0; 1].
output: A sta M.
M = Ptsta (scheduler estimator(P ath(σ≤τ ), P t(P ath(σ≤τ )))) ;
attempt ← 1;
while attempt > 0 do
attempt ← 0;
C ← clusterize(M);
for n ← 1 to |C| do
for k ← 1 to |C n | do
x ← k + 1;
n
while C n,x 6= C n,|C | do
if is active(C n,x ) then
if similar(C n,k , C n,x , α) then
dmerge(M, C n,k , C n,x , ·, ·);
inactivate(C n,x );
attempt ← attempt + 1;
// See definition (1)
x ← x + 1;
M = infer distributions(M);
The algorithm 1 together with the auxiliary functions scheduler estimator,
similar, and infer distributions establish a new methodology to learn
GSMP, which are processes that hold a semi-Markov property. We call the presented solution model identification in the limit.
The algorithm 1 has notations associated to the ordered set of clusters and
also between these cluster elements, as follows:
– the set of n ordered clusters C, classified by events, are denoted by C n , and
– C n,k is the k th element of cluster C n , for each 1 ≤ n ≤ |C| and 1 ≤ k ≤ |C n |.
The clustering function clusterize produces groups of elements C with a selection based on the feasible event set τ (s. ) for each state s. of M, where M at first
attempt is equal to Ptsta (P t(P ath(σ≤τ ))). The is active and inactivate
functions allow that only the prefix tree nodes that were not merged are used,
and the function similar tests the similarity between two feasible event sets
τ (C n,k ) and τ (C n,x ).
The testing statistically the similarity of states (T3S) algorithm is subdivided in three blocks. The first block is composed by a clusterize function
that clusters the states with an equal active event set (the function τ ). The
clusterize function establishes a plain static equivalence between states, nevertheless we need to establish a while cycle with attempt > 0 to cover the other
cases such as when dmerge changes the clock samples of the similar states. With
this clusterize function we guarantee equation 1, which says that only states
with event sets of the same size can be merged.
In the second block we use the similar function to test when two states are
similar. This function is defined as similar and it uses the Kolmogorov-Smirnov
test [8, p. 552] to decide if two empirical probabilistic distributions are equal. It
verifies whether there exists a one to one correspondence of events between two
active event sets through a statistical equivalence. If there is a correspondence for
all events of an active event set, the equation 2 is satisfied. Lastly, the algorithm
1 merges the equal states by the function composed by equation 7. It initializes
Function scheduler estimator(P ath(σ≤τ ), P t(P ath(σ≤τ )))
input : A P ath(σ≤τ ) with initial state s, and a P t(P ath(σ≤τ )).
output: The P t(P ath(σ≤τ )) with replaced old clocks by original values of clocks.
for n ← 1 to |P ath(σ≤τ )| do
for l ← 2 to |σ n | do
for x ← 0 to l − 1 do
// Decrement p
p ← l − x;
if σ n kE [s, l] 6∈ τ (ν(σ n kX [s, p])) and |τ (ν(σ n kX [s, p]))| ≤ 1 and
σ n kE [s, p] = σ n kE [s, l] then break;
if p > 1 then p ← p + 1;
if σ n kX [s, p] 6= σ n kX [s, l] then
Val ← 0;
for t ← p to l do
// Estimating
Val ← Val + σ n kG [s, t];
n
n
if σ kX [s, t] = σ kX [s, l then break;
replace(P t(P ath(σ≤τ )), ν(σ n kX [s, l]), Val);
the construction of the sta. This function defined according to the equation 7
solves the problem of non-deterministic merge of states when two states have
the same set of events.
Inferring the state age structure. The considered stochastic process, the
GSMP, requires a state age memory [4,10]. This state age structure, normally
identified as a scheduler, allows the use of different continuous distributions
for each inter-event time, i.e., the inter-event times between events of a GSMP
are not equal. This is not true in CTMP where all inter-event times follow an
exponential distribution. The scheduling of events is a data structure that allows
the calculation of the next event to be triggered.
We introduce the notion of scheduler estimation in order to calculate the
history of clock values for each event. Thus, we reconstruct values sampled from
new clocks to estimate the events distribution of the model that produces those
executions. For instance, suppose that we have two events a and b that can be
triggered in a state s0 , where s0 is the initial state of the model, and there are
two random variables Xa ∼ E(0.2) and Xb ∼ W (1, 0.1) associated to each event.
The events a and b begin labeled as new clock and therefore two samples are
given by random variables, respectively, Xa and Xb . Given the samples xa = 1.2
and xb = 0.5 from their respective distributions, the event b wins. Next, the
clock value of event b is subtracted and is stored with value 1.2 − 0.5 = 0.7 and
a new clock is sampled to b. Then, the event a wins with value 0.7 versus the
event b with new clock 1.4. Therefore we can calculate the original value of the
event a from the produced sample execution {s0 , (b, 0.5), s1 , (a, 0.7), ·} adding
inter-event times between a and b, 0.5 + 0.7 = 1.2. So, we can say that the value
sampled in state s0 to the event a has the value 1.2, which is true. Although
this scheme can be extended recursively to any finite sample execution, we need
to clearly identify the new and old clocks for any path. In order to check the
definition (2), only the new clock samples are suitable to predict the distributions
associated to each event i. The estimation process happens essentially due to the
existence of the map function ν (defined in 3.1).
The function scheduler estimator has a particular notation of order in a
set of paths P ath(σ≤τ ) with prefix σ≤τ that is described, as follows: σ n is the
nth path P ath(σ≤τ ), where 0 < n ≤ |P ath(σ≤τ )|, and σ n,l is the lth piecewise
of path n, where 0 < l ≤ |σ n |, where symbols (’|’) denotes the size of a variable that is between these symbols. We explain in the following how function
scheduler estimator estimates original sample clock values. First, the algorithm begins by traversing each path of sample executions set in a bottom-up
order to know if the current event can be triggered by a clock with a label ”new
clock” or an ”old clock”. In this step, we know that an old clock is valid when the
successor nodes have this event activated, otherwise it is as ”inactive clock”. The
algorithm goes to the predecessor node of the current node recursively, always
in one sample execution, until we have found a possible inactive clock. When an
inactive clock is found for the current event, in state s. , this implies that this
event e cannot be in τ (s. ), which is an active event set for a state s. . Therefore,
even in the worst case, the first state (s0 ) of the sample execution can always be
found. Given this element we can reconstruct the original clock value by the sum
of the values between the found state (s. or s0 ) and the current state. Lastly, we
replace the old clock value by the estimated original clock value.
Establish the similarity test of states. The similarity between two active
event sets Γ1 and Γ2 within the type I error α is solved by the function similar.
Thus, the Kolmogorov-Smirnov test (K-S test) [8, p. 552] is applied to test if
two distributions are or are not the same (i.e., compare two empirical cumulative
distribution functions). Let {Xn }n≥1 and {Yn }n≥1 be two independent successions of independent real random variables with common distribution functions,
respectively F1 and F2 . The K-S test allows testing two hypothesis,
H0 : F1 (x) = F2 (x), for all x ∈ R against
(4)
H1 : F1 (x) 6= F2 (x), for some x ∈ R
using the statistical test,
r
Tn1 ,n2 =
n1 n2
sup |Fn1 (x) − Fn2 (x)|
n1 + n2 x∈R
(5)
where Fn1 and Fn2 denotes respectively the empirical distribution functions
associated to the samples (X1 , ..., Xn1 ) and (Y1 , ..., Yn2 ). The random variable
Tn1 ,n2 converges to the Kolmogorov distribution whose values are tabled in [8,
p. 555]. For a significance level α we reject H0 when the observed value Tbn1 ,n2 of
the test statistic for the particular samples (x1 , ..., xn1 ) and (y1 , ..., yn2 ) exceeds
the value Kα , with G(kα ) = 1 − α. The two empirical cumulative distributions
Fn1 and Fn2 are estimated using the function T . This function estimates the
distribution from a set of sample clocks and is defined, as follows:
clock value of z1 , z2 , ..., zn that are ≤ x
(6)
Tn (x) =
N
where x is the threshold of the cumulative function, and zi for all events i ∈ D
and D ⊆ E are the sample clock values.
Function similar(s0 ,s00 ,α)
input : Two states s1 and s2 , and a type I error α.
output: Boolean, true if it is similar, or otherwise false.
Γ1 ← τ (s1 ); Γ2 ← τ (s2 );
if |Γ1 | 6= |Γ2 | then return false;
for each e1 in Γ1 do
while |Γ2 | > 0 do
e2 ← get(Γ2 );
Fn1 = T (%(s1 e1 )); Fn2 = T (%(s2 e2 ));
if
q
n1 n2
n1 +n2
sup |Fn1 (x) − Fn2 (x)| > Kα
then
x
if similar(δ(s1 e1 ), δ(s2 e2 ), α) 6= true then
return false;
continue;
put(Γ2 , e2 );
for each e1 , e2 in Γ1 such that
q s1 e1 ∼ s1 e2 do 1
2
√1
√1
if |%(s1 e1 ) − %(s1 e2 )| >
then
2 log α
n1 +
n2
return false;
if |Γ2 | < 1 then return true; else return false;
The function similar begins by comparing two feasible event sets Γ1 and
Γ2 . The comparison is made by establishing a one to one relation between events
in feasible sets. If the relationship between events is complete then the states
are similar and so it allows equation 2 to be checked. Another particularity in
this algorithm is when two events have the same ’id’ in the feasible event set, for
two states respectively. This indicates that the event is triggered as e but there
are different probabilities in the transition probability matrix. To solve this,
we construct a hypothesis test for two Bernoulli distributions using Hoeffding
bounds [3] in order to know if the occurrence probabilities are the same (i.e.,
satisfies equation 3). This method is similar to the one described in [13]. The
method checks if the means %(s1 e1 ) and %(s1 e2 ) of two Bernoulli distributions
are statistically different or not.
The deterministic merge function. The existence of equal feasible event sets
(Γ (s) = Γ (s 0 )) creates a non deterministic choice when merged. This problem
can be solved applying a deterministic merge function, as follows:
While ∃s, x ∈ Q and ∃e ∈ E such as s0 , s00 ∈ σ(s, x e), merge(s0 , s00 )
(7)
The merge shall be made recursively until no more non-deterministic event transitions occur. In the T3S algorithm this is named as dmerge function. We describe
with a brief example the application of the equation 7. Let two non-deterministic
transitions from s1 and s2 labeled with same event e, τ (s, x ν(s0 )) = {e} and
τ (s, x ν(s00 )) = {e} respectively. Supposing that we merge s0 in s00 we get a new
non-deterministic choice between s1 and s01 until to the end of the paths. Therefore, we need to apply the merge recursively until there are only deterministic
choices.
Inferring event distributions using maximum likelihood. And now, to
conclude the learning method, we need to introduce the concept of distribution
discriminant and its selection criteria. Given a prefix tree with all the similar
states merged, we need to estimate the parameters of each empirical distribution
Function infer distributions(M)
input : A deterministic sta M.
output: A deterministic sta M with associated random variables and those distributions.
for each n in Q such that removed[n] = 0 do
for each eRin τ (s, n) do
Ge ← 0∞ arg max {ln [Ld (%[n e])]};
fd ∈D
of each event that best fits the sample data. For this, the maximum likelihood
estimator (MLE) and selection criteria, such as maximum log likelihood, are
needed [9]. In order to test the validity of the selection model, a goodness of fit
test could be applied (e.g., X 2 ).
We present the function infer distributions that estimates the distribution parameters using the maximum likelihood estimator (MLE) for continuous
distributions such as: Exponential, Weibull and Log-Normal. However, there are
other continuous distributions, such as: Rayleigh, Normal (with non negative
part), that we have not described in detail in this paper, but that can be applied
in this estimator. The log likelihood Ld of a distribution fd is defined by
n
X
ln [fd (xi | θ)]
(8)
ln [Ld (θ | x1 , ..., xn )] =
i=0
where θ is the set of parameters for a distribution fd , and x1 , ..., xn are samples to
be measured. MLE of fd is composed by the maximization of likelihood function
Ld with respect to the set of parameters θ which are parameters used in the
following criterion. The maximum log likelihood criterion selects the model that
best fits the data from the different estimations of distributions with maximum
likelihood [9]. This selection criteria is defined by the maximum value of the
calculated log likelihood, i.e.,
ln [Ldm ] > max {∀d ∈ D s.t. d 6= dm then ln [Ld ]}
(9)
where D is a set of distributions in analysis, and ln [Ld ] the log likelihood of
distribution d. The distribution with maximum likelihood is denoted by dm ∈ D.
So, we need two or more distributions to make a decision. Note that distributions
of set D are distributions with a parameter or a set of parameters estimated by
using the MLE method. By this means we estimate the distribution that, in the
limit, is more similar to the distribution that produce these samples to learn.
4
Model identification in the limit
The correctness argument for the proposed learning algorithm can be defined
in terms of correct model identification. For such, we need to show that the
produced GSMP is similar to the model that was used to generate the samples.
There are therefore three conditions or clauses for correct model identification:
1. the prefix tree constructed by sample executions provided by a GSMP,
P t(P ath(σ≤τ )), is also a GSMP.
2. the sample executions to learn have the minimal information necessary to
form the model.
3. the P t(P ath(σ≤τ )) with state merge, in the limit, converges to one similar
model that identifies P ath(σ≤τ ).
Since the definition 1 is correct by construction and assuming a structurally
complete sample, the correctness of the learning algorithm depends essentially
on the correctness of the state merge procedure. From definition 1 the first clause
is ensured and therefore only the other two clauses need to be guaranteed. For
the second clause, we need to ensure that the sample executions to learn form a
structurally complete sample (SCS). This is known as the problem of insufficient
data training and when this occurs it is obviously impossible to learn the model
that produces an incomplete set of sample executions. For the third clause,
we need to ensure that, in the limit, the error of merging two non equivalent
states tends to zero. Note that the error of merging two non equivalent states
is guaranteed by the K-S test. With these three clauses satisfied, we can prove
that the model that is learned by the algorithm, in the limit, and behaves as the
original.
Ensuring a structurally complete sample. Commonly used methods to
achieve a structurally complete sample, like reachability analysis, are not enough
when the model is not known. In this case acquiring a SCS is a big challenge.
The selection of termination probability for a sample execution can be used
as a method to achieve a SCS in known and unknown models. However, the
probability measure of a path from an unknown model is not trivially assured.
A SCS is a sample composed by a set of paths that explores every possible
transition and every reachable state. This structure solves a common problem
known as insufficient data training to learn a model, i.e., only with paths of
infinite size can one guarantee that for any model, the learned model eventually
converges to an equivalent. With a SCS, we ensure that the minimum information
needed to learn a model from sample executions is achieved. In order to ensure
that a set of paths relying on SCS, we introduce a termination probability pt as a
solution. The simulation technique is described, as follows: 1) simulate the SDES
M , 2) terminate when probability measure of a path σ≤τ of execution is less than
pt , i.e., µ(C(σ≤τ , hEk , Yk∗ i , Xk , ..., hEn , Yn∗ i , Xn )) < pt , and 3) apply recursively
the steps 1 and 2 to generate more sample executions. We simply note that
the solution method based on termination probability has weaker correctness
guarantees than reachability analysis. It also places a greater responsibility on
the user, who has to choose a good value for pt . The automatic achievement of
pt is not trivial.
The state merge error, in the limit, converges to zero. Assuming that
the first two correctness clauses are satisfied then the learning algorithm can
only make errors when testing the similarity between two states. In addition,
the errors α and β between two event distributions of the K-S test are defined,
as follows:
. α is the type I error of H0 be rejected, where in fact H0 should not be
rejected, and
. β is the type II error of H1 be accepted, where in fact H1 should be rejected.
Hence this means that the state merge errors αs and βs are defined by the
multiplication
of the errorsQmade in the comparison of each event distribution
Qk
k
αs = i=1 αi and βs = i=1 βi , where k is the number of similar events.
∗
Moreover, the model errors α and β ∗ are equal
Qn to the multiplication
Qn of the error
αs and βs used for each state merged α∗ = i=1 αs [i] and β ∗ = i=1 βs [i], where
n is the number of merged states. We present, in the following, two propositions
about the bounds of type II error.
Proposition 1. Suppose the Kolmogorov-Smirnov test for two samples with size
n1 e n2 respectively, and a significance level α. For sufficiently large samples,
i.e., when n1 → ∞ and n2 → ∞, β tends to zero.
In the following we present a sketch of the proof. The proof of this proposition
is based on the following facts: by the theorem of Glivenko-Cantelli when H0 is
true and n1 and n2 tend to infinity, sup |Fn1 (x) − Fn2 (x)| converges certainly
x∈R
to zero. So, from the uniqueness
of the limit, when H0 is true and n1 → ∞,
q
n2
sup
|Fn1 (x) − Fn2 (x)| tends certainly to +∞.
n2 → ∞, we have that nn11+n
2
x∈R
Therefore, in the validity of H1 , the probability of rejecting H0 tends to 1, which
was to be demonstrated.
It is known that the convergence of k-S test is exponential [24]. Moreover,
the reader can find a detailed account to β error boundaries and correctness
arguments as presented here in [14].
Proposition 2. If the type II error β, in the
Qklimit, for the K-S test converges
to zero, a multiplication of the type II error i=1 βi , in the limit, also tends to
zero.
This proposition is trivially satisfied. Given the limit law of multiplication, we
know that the limx→a f (x) · g(x) = limx→a f (x) · limx→a g(x). Then, because
f (x) = g(x), the limit is maintained.
5
Tool and proof of concept
The implementation of the learning algorithm is the basis of the SDES toolbox, that allows the learning and analysis of a set of case studies, such as: task
schedulers, land mobile satellite communication systems, and network traffic
model estimation. In order to illustrate the learning process, we use as an example a scheduler for a multi-processor system and show how the proposed method
can learn a model that can be used for further analysis.
SDES Toolbox. We have developed a SDES toolbox5 in C and C++ language
that implements the presented learning approach. The toolbox was developed to
analyze and learn generalized semi-Markov processes. It also supports the model
description by an event-driven language that can be directly used as the input
model language to a GSMP model checker [21].
5
Available from http://desframework.sourceforge.net/
a
, ab, c
b
A, bc,
a
AB, c,
b
c
c
init; 1/3
start
, , abc
, ac, b
, bc, a
b
AC, b,
init; 1/3
init; 1/3
c
c
ABC, ,
b
a
a
b
C, ab,
a
B, ac,
c
BC, a,
Convergence analysis
Performance analysis
Number of states
Time (s)
6
4
2
0
102
103
Number of samples
104
10
5
0
0
200
400
600
800
Number of samples
1,000
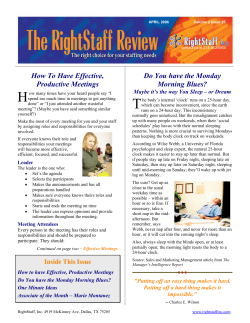
Fig. 1. Learning GSMP of a multi-processor system scheduler with uncertainty
Stochastic analysis of a scheduler for a multi-processor system. An
optimal scheduler design for a multi-processor system with uncertainty in task
duration is difficult to achieve and a significant challenge [18]. In figure 1, we
present the model from which it is possible to derive, statistically, answers about
the worst case sequence and the optimal case sequence of a two-processor scheduler system. In this system there are two processors that can run two tasks at
the same time. Supposing that there are three tasks {a, b, c}, only two tasks
can be run at the same time and the other one only when one of the tasks is
finished. The model of this system has eleven states which describe the state
of the two processors and tasks at any given time. The scheduler can initially
make three choices, (a, b), (a, c), or (b, c). The event init of the model, representing these choices is: p([, ab, c]; [, , abc], init) = 13 , p([, ac, b]; [, , abc], init) = 13 , and
p([, bc, a]; [, , abc], init) = 13 respectively. These choices bind the time (i.e., worst
and optimal) of the execution for these three tasks. If we have a scheduler that
is completely random (i.e., the probability of events {ab, ac, bc} are equiprobable) then we select the path with maximum probability which means that it
is the better sequence. Thus, if we have a scheduler that begins with the optimal tasks then we will have an optimal scheduler for these tasks. However, we
need to distinguish two situations, as follows: if only exponential distributions
are used then the choice is easy, the rate of distribution identifies the order (the
lower expected value is the more probable), but if on the other hand we have
different continuous distributions then the ordering selection is not so trivial.
This will be the case for this example that our method will solve. Namely using the distributions init : Tinit ∼ Exponential(1), a : Ta ∼ W eibull(0.1, 1),
b : Tb ∼ Exponential(0.4), and c : Tc ∼ Log-N ormal(0, 0.25), respectively.
Given the sample executions that form a SCS, we have compared the performance and convergence of our algorithm given an increasing number of sample
executions, see figure 1. We can see in the convergence graph that for one thousand sample executions, the model converges into a model with same number of
states. According to the correctness of our learning algorithm, we have guaranteed that if the umber of samples grows infinitely then the model converges to
the original model. Notice that in fact in this example we verify that the model
learnt by our algorithm with approximately nine hundred sample executions has
the same event language of the original model. This experiment was made on a
machine with an Intel Core 2 Duo CPU T7500 @ 2.2Ghz processor with 4Gb of
memory. An interesting point in this model is that the path with the greatest
probability to occur is the optimal case execution and the path with the lowest
probability is the worst case execution, when we have a random scheduler.
6
Conclusion and Future Work
To the best of our knowledge, this is the first learning algorithm that is able
to cope with GSMP learning of deployed stochastic discrete event systems for
which we do not know the model before-hand. The learning algorithm can be
used to verify the deployed systems using existing probabilistic model-checking
tools. We also have developed a toolbox for Matlab that applies the techniques
described in this paper. We have shown with our experiment that this type of
model is really capable and scalable. We can use it not only for the analysis of a
computer system but also to verify or test it. However, one of the limitations of
our work is that it may not scale up for systems having large stochastic timed
automata. Development of techniques that allow the approximate verification
while the model is learned may be the solution.
Acknowledgments
We would like to thank to Ana Paula Martins for the very constructive
discussions about the statistical properties of the proposed T3S algorithm.
References
1. Benedikt Bollig, Peter Habermehl, Carsten Kern, and Martin Leucker. Angluinstyle learning of nfa. In Proceedings of the 21st international jont conference on
Artifical intelligence, IJCAI’09, pages 1004–1009, San Francisco, CA, USA, 2009.
Morgan Kaufmann Publishers Inc.
2. Benedikt Bollig, Joost-Pieter Katoen, Carsten Kern, Martin Leucker, Daniel Neider, and David R. Piegdon. libalf: The automata learning framework. In CAV,
pages 360–364, 2010.
3. Rafael C. Carrasco and Jose Oncina. Learning deterministic regular grammars
from stochastic samples in polynomial time. RAIRO (Theoretical Informatics and
Applications, 33:1–20, 1999.
4. Christos G. Cassandras and Stephane Lafortune. Introduction to Discrete Event
Systems. Springer-Verlag New York, Inc., Secaucus, NJ, USA, 2006.
5. Alexandre David, Kim G. Larsen, Axel Legay, Marius Mikucionis, and Zheng
Wang. Time for statistical model checking of real-time systems. In CAV, pages
349–355, 2011.
6. Andr´e de Matos Pedro. Learning and testing stochastic discrete event systems.
Master’s thesis, Universidade do Minho, Portugal, December 2011.
7. Andr´e de Matos Pedro and Sim˜
ao Melo de Sousa. Learning generalized semimarkov processes: From stochastic discrete event systems to testing and verification. Technical Report DCC-2012-01, Department of Computer Science, University
of Porto.
8. Morris H. DeGroot. Probability and Statistics. Addison Wesley, 2nd edition, 1989.
9. Arabin Kumar Dey and Debasis Kundu. Discriminating among the log-normal,
weibull, and generalized exponential distributions. IEEE Transactions on Reliability, 58(3):416–424, 2009.
10. P. W. Glynn. A gsmp formalism for discrete event systems. Proceedings of The
IEEE, 77:14–23, 1989.
11. E. Mark Gold. Language identification in the limit. Information and Control,
10(5):447–474, 1967.
12. Mor Harchol-Balter and Allen B. Downey. Exploiting process lifetime distributions
for dynamic load balancing. ACM Trans. Comput. Syst., 15:253–285, August 1997.
13. Christopher Kermorvant and Pierre Dupont. Stochastic grammatical inference
with multinomial tests. In Proceedings of the 6th International Colloquium on
Grammatical Inference: Algorithms and Applications, ICGI ’02, pages 149–160,
London, UK, UK, 2002. Springer-Verlag.
14. Jerome Klotz. Asymptotic efficiency of the two sample Kolmogorov-Smirnov test.
Journal of the American Statistical Association, 62(319):932–938, 1967.
15. Axel Legay, Benoˆıt Delahaye, and Saddek Bensalem. Statistical model checking:
An overview. In RV, pages 122–135, 2010.
16. Ming-Wei Lu and Cheng Julius Wang. Weibull data analysis with few or no failures.
In Hoang Pham, editor, Recent Advances in Reliability and Quality in Design, pages
201–210. Springer London, 2008.
17. Rajesh Parekh and Vasant Honavar. Learning dfa from simple examples. Machine
Learning, 44(1/2):9–35, 2001.
18. Michael L. Pinedo. Scheduling: Theory, Algorithms, and Systems. Springer Publishing Company, Incorporated, 3rd edition, 2008.
19. Koushik Sen, Mahesh Viswanathan, and Gul Agha. Learning continuous time
markov chains from sample executions. In Proceedings of the The Quantitative
Evaluation of Systems, First International Conference, pages 146–155, Washington, DC, USA, 2004. IEEE Computer Society.
20. Wei Wei, Bing Wang, and Don Towsley. Continuous-time hidden Markov models
for network performance evaluation. Perform. Eval., 49:129–146, September 2002.
21. H˚
akan L. S. Younes. Ymer: A statistical model checker. In CAV, pages 429–433,
2005.
22. H˚
akan L. S. Younes, Edmund M. Clarke, and Paolo Zuliani. Statistical verification
of probabilistic properties with unbounded until. In SBMF, pages 144–160, 2010.
23. Hakan Lorens Samir Younes. Verification and planning for stochastic processes
with asynchronous events. PhD thesis, Pittsburgh, PA, USA, 2004.
24. C. S. Yu. Pitman efficiencies of Kolmogorov-Smirnov test. The Annals of Mathematical Statistics, 42(5):1595–1605, 1971.










© Copyright 2025