
AA241x-Intro-2015-Distribute
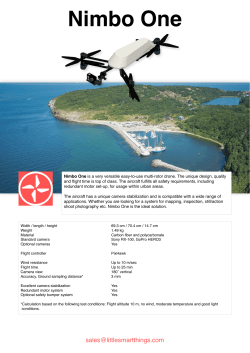
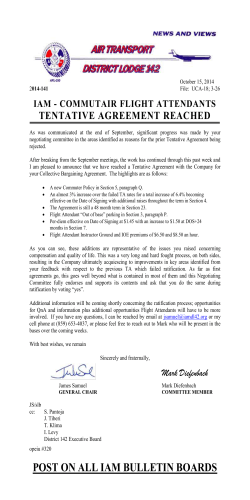
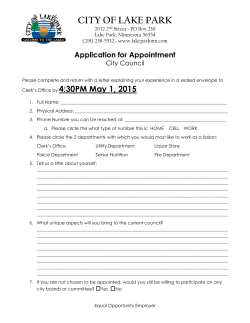
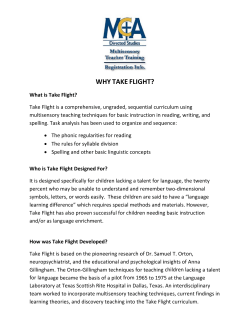
Introduction to AA241x Spring Quarter 2015 W E L C O M E , O R G A N I Z AT I O N , AND MISSION LECTURE 1 MARCH 30, 2015 Juan J. Alonso, Robbie Bunge, Adrien Perkins Department of Aeronautics & Astronautics Stanford University INTRODUCTIONS OBJECTIVES OF THIS COURSE M I S S I O N , H A R D WA R E , S O F T WA R E TEAMS & REQUIREMENTS GRADING INTRODUCTIONS OBJECTIVES OF THIS COURSE M I S S I O N , H A R D WA R E , S O F T WA R E TEAMS & REQUIREMENTS GRADING 4 Personnel Instructors: § Prof. Juan J. Alonso, Durand 252, x3-9954, jjalonso@stanford.edu § Robbie Bunge, Durand 464, rbunge@stanford.edu Course Assistant (CA): § Adrien Perkins, Durand 453, 201-679-3680, adrienp@stanford.edu § A set of discipline “mentors” who can help with specific discipline-related questions and piloting 5 Communications (1 of 2) Class list. Go to lists.stanford.edu and subscribe to: aa241x-class Course website / wiki (want everyone to contribute!) § http://adl.stanford.edu/groups/aa241x Piazza site: search for AA241X and add! 6 Communications (2 of 2) You will be required to create and maintain a team website that contains: § Team members, contact information, responsibilities § All technical details of your design, controls, mission planning (it is up to you how you want to organize it… but it must be kept current: we will check it regularly to gauge progress) § Problem set solutions § Relevant data § Pictures, videos, etc. documenting work 7 Facilities Class project areas: § Durand 353 (will provide combination) § Durand 055 (will provide combination / keys / access) § Durand 464: Laser cutter location Lake Lagunita: our flight test facility!!! Access to PRL if needed. Foam cutter, laser cutter, vacuum bagging, basic electronics, etc. Spaces will be assigned to each team: keep them neat, please! 8 Safety First! Some of the equipment you will use requires that you pay close attention / training to be safe: § If you are not sure, ask for help before you do something silly! § Training sessions will be held § When using the foam cutter and laser cutter (after you have demonstrated proficiency) you MUST observe posted safety precautions and there MUST be always two people in the room. § Machines / chargers will NOT be left unattended: fire hazard § This is serious: equipment privileges will be revoked if you fail to observe all safety precautions Safety ALWAYS comes first: use good judgment!!!! 9 Flying in Lake Lagunita We are fortunate to have Lake Lag so close to the Durand Building But you must be careful to preserve this wonderful resource for future generations of UAVers A few rules to be observed: § Always fly well within the boundaries of the lake, avoiding flying over trees and populated areas § Avoid walking on the lake itself: you can fetch planes, etc, but try not to make unnecessary use of the lake itself § Be mindful of your footprint: trash, stepping on flora and fauna, disturbing the birds and amphibians § You may encounter bird-count teams. Our airplanes can disturb their counts. Plan on flying on another day § If anyone objects to your flying in Lake Lag, be polite, stop flying and refer them to Prof. Alonso 10 Office / Lab Hours TBD after team make-up and composition is complete As the quarter progresses, the lecture time slot will be occupied with one-on-one instructors / team meetings (to be scheduled) Open door policy for instructors and CA Take advantage of mentors! Seek out help/advice of UAV Club members 11 Become an AMA member…for free! The Academy of Model Aeronautics has started a pilot project whereby every current student can become a member for free! Benefits: - Membership - Digital copy of monthly magazine - $2.5M liability coverage In all of our flights, you will adhere to the AMA safety code: under 400 ft, line of sight, < 4 lbs, always within the bounds of Lake Lag Last Year’s Mission 12 13 2014 Mission: Search & Rescue Allowable area ✖ Target ✖ ✖ ✖ Camera Field of View (FOV) = f(h) Target position estimate, R = g(h) Estimated location ✖ 2014 Mission: Scoring 1. 2. 3. Find the targets as fast as possible – “tsight” Minimize the targets’ location error Demonstrate reliability over multiple flights Total Score: Three scores may be discarded (mulligans) nflight is incremented for every retained scoring flight achieving J>0 14 2014: Constraints Scoring begins when the UAV crosses 50ft AGL in autopilot. § AGL = Above Ground Level, Lake Lag floor Scoring ends if the Autopilot is turned off Scoring ends when battery consumption passes 300mAh The camera will pause snapshotting if the UAV flies above 400ft AGL, or below 100ft AGL 15 Target Locations Some Flight Data…Team 1 17 Some Flight Data…Team 2 18 Some Flight Data…Team 3 19 INTRODUCTIONS OBJECTIVES OF THIS COURSE M I S S I O N , H A R D WA R E , S O F T WA R E TEAMS & REQUIREMENTS GRADING 21 Some Thoughts and Lessons Learned From Last Year Three teams far exceeded our expectations!! More than 30 flights in 3 days! You should be as successful! Making the competition truly fair (more flights, reliability, timing, etc) is always difficult…but we try! Must continue to try to strike the right balance between aircraft design, controls, and other disciplines Teams may have been a bit too large? 22 Number of Units / Outcomes This course is supposed to be taken for 3 units. There is a very significant amount of work, but you will also be working in teams of 7-8 students. At the end of this course you should have acquired a fundamental understanding of: § The process that is typically followed to design an autonomous aircraft and its mission § Some basic understanding of all the component disciplines in such a design, and an in-depth understanding of at least one of those disciplines (that you are responsible for within your team) § An appreciation for the limitations of analysis / models when compared to actual flight experiments § How to work in an interdisciplinary team and exercise leadership in at least one area INTRODUCTIONS OBJECTIVES OF THIS COURSE M I S S I O N , H A R D WA R E , S O F T WA R E TEAMS & REQUIREMENTS GRADING This Year’s Mission 24 2015 Mission: Fire Monitoring and Prevention • This year’s mission is inspired by UAVs that may: § Monitor a forest fire as it spreads § Extinguish a fire using an on-board load of water • Your objective is to analyze, design, build, and test fly an unmanned aircraft that most successfully monitors and extinguishes a fire § It is a competition! § Many choices to make § Work includes vehicle, control system, mission, operation, construction, etc. § Not for the faint hearted! 2015 Mission: Fire Monitoring and Prevention Valid fire region Cell with active fire Prevailing wind Camera Field of View (FOV) = f(h) Extinguished cell 2015 Mission: Parameters (Near Final…) • • • • • • • • • • • • • • FIELD_CENTER_LAT = 37.4224444° FIELD_CENTER_LON = -122.1760917° FIELD_RADIUS = 340 m CELL_SIZE = 20 m Aircraft cannot exit Lake Lagunita area (defined as a circle of D = 340 m, centered on (LAT,LON) Number of available “squirts” is proportional to additional mass carried, Nsquirt / mwater = 1 “squirt” / 10 grams Can only squirt when flying > 100 ft and < 400 ft altitude Once a cell has been squirted it cannot catch fire again Mission duration specified, Tmission = 10 min Battery capacity unlimited, but must land when voltage is lower than a pre-specified threshold Prevailing wind direction is given Stochastic fire propagation algorithm known Nstart<= 2 fires can start at t = 0 sec Fire evolves with Δt = 15 sec 2015 Mission: Scoring • Mission score is related to your ability to prevent the fire from spreading, compared to allowing the fire to propagate unattended • Cells burned if fire unattended, Nburn-unatt • Cells burned with UAV active, Nburn-UAV • Mission score = 100 x (1 –(Nburn-UAV / Nburn-unatt)) • Reliability multiplier δrely = 1 + 0.1 floor (nflight/5) • Allowed 3 “mulligans” during official flights 2015 Mission: Competition • AA241x final competition will take place over multiple days (June 1-9, 2015). • On 3rd or 4th day, we invite guests from AA and other departments / institutions • Final reports due on June 10, 2015 • Final class party that week AA241x Hardware • Autopilot - Pixhawk • Running PX4 flight stack • 32bit processor, 2MB Flash • 3D accl, gyro, mag, baro • Pitot Tube (airspeed) • GPS • Wireless Telemetry • RC equipment • Servos • Motors • Transmitter / receiver • Batteries • Building Supplies (balsa, foam, etc) • Required • Laptop with any OS AA241x Software PX4 Firmware • Stanford PX4 software stack • Built on NuttX real time OS • “Module” based software Nuttx (real time OS) Pixhawk Firmware Middleware Hardware PX4 Firmware High Priority Module Low Priority Module Sensor Module Other Modules … • Your Code • High and Low priority modules (threads) for control law • Provide you with take picture and water drop functions, intermodule communication • QGroundControl ground station • Real time UAV and mission status INTRODUCTIONS OBJECTIVES OF THIS COURSE M I S S I O N , H A R D WA R E , S O F T WA R E TEAMS & REQUIREMENTS GRADING 33 Team Composition Given enrollment and limitations in lab space / resources, we expect 3 teams will be formed (with approx. 7-8 students each) Each team must gather the following expertise: § § § § § § § § Aerodynamics / configuration design Propellers / propulsion Guidance, Navigation & Control Familiarity with hardware (batteries, servos, receivers, transmitters, soldering, accels, gyros, pressure sensors) Software (including RTOS and thread programming) Aircraft performance Mission planning Fabrication / construction 34 Team Composition (II) Each student to fill out a form we are handing out with areas of expertise to help balance the teams. If you have a preference for teammates, please state that in the form. We will try to take that into consideration. Teams (and team names: think of a cool one!) will be introduced during second lecture We encourage your team to meet regularly (minimum: twice a week for one hour), and to select a team lead. We have found that a “Chief Engineer” in each team facilitates the progress of your work. Consider such a position and choosing the right person. We do want an official POC, who can be the same as the CE Team meetings include discussions and team working sessions Instructors and CAs are available to participate in some of your team meetings to facilitate and answer questions that may arise during the course Syllabus / Schedule / Milestones 35 “Fly early / fly often” approach A few lectures to ensure you have the basic knowledge Lots of lab time “Assignments” to make sure you learn R/C, operation of the board, autonomous flight, before building your own aircraft Some guest lectures 36 Tentative Syllabus March 30: Introduction, team make-up discussion April 1: Teams finalized, performance estimation, hardware handed out April 1 or 2: Intro to Hardware Tutorial Session April 6: Team Progress Review April 8: Motor-propeller performance analysis & estimation April 13: Flight dynamics, PS1 Due April 15: Low-speed airfoil and wing analysis / design April 20: Intro to S&C, basic PID control ideas, aircraft stability & control (Rock) April 22: Team Progress Review April 27: Lab time or Team Progress Review April 29: Optimal Path Planning (Pavone), PS2 Due May 4: Systems Engineering (Weiss) 37 Tentative Syllabus (II) May 6: Flight testing and basic system ID May 11: Team Progress Review May 13: Lab time May 18: Team Progress Review May 20: Lab time, PS3 Due May 25: UAVs: an industry perspective (S. Morris) May 27: Lab time Jun 1-5: FLIGHT TRIALS!!!! Jun 4: Tentative Open House day Jun 9-10: Possible flight trials. June 10: Final reports due Jun 11: Grades due June 11 or 12: Class Party 38 Some Thoughts Very fast paced. Team must be well organized and you MUST stick to a weekly routine. PS’s are VERY important: extra credit will be awarded for completing them ahead of schedule (5% extra credit for each day turned in early). All 3 PSs are being handed out in case you want to move ahead. Remember, this class is organized as a competition… and there is a prize for the top team: Top team gets to keep all the hardware! 39 PS Description / Outline PS1: § § § § § Build kit R/C aircraft, build 1st iteration of your own model Fly with autopilot (not engaged), log data, ground station Analyze data and compare to predictions: L/D, CLmax, VLM Initial path planning (strategy only!) Report, no presentation. PS2: § Demonstrate basic autonomous control on R/C kit aircraft, including: straight and level flight with given heading/altitude. § Demonstrate basic attitude control § Report/plot intended vs. actual data, experiment with control gains to try to minimize errors § Build 2nd aircraft prototype; ready to fly. § More refined mission planning / approach. 40 PS Description (II) PS3: § Demonstrate waypoint navigation (at least with kit R/C aircraft, possibly your own aircraft) § Waypoint navigation must demonstrate altitude changes § Detailed mission planning approach, support simulations in place. 41 Hardware Issued Pixhawk PX4 board with telemetry GPS, power module, speed sensor Wiring / cables Receiver Batteries Motors / propellers Supplies in lab (foam, plywood, glues, fiberglass, epoxy, balsa, etc) Things you need: § Laptop, software stack (Mac OS X, Linux, and Windows should work). You might need to use virtual machine software to run windows under Linux / Mac OS X. § Toolbox for the field. § Lots of energy and drive. 42 Equipment Responsibilities Each team is responsible for returning the equipment you will be handed out in the same condition you received it Each team will have a budget of $250 for the quarter for anything you need. Keep receipts to be reimbursed at the end of the quarter You break it, you replace it! Please be careful, heed warnings, and wait until you have received training to use equipment Attenuating circumstances will be taken into consideration INTRODUCTIONS OBJECTIVES OF THIS COURSE M I S S I O N , H A R D WA R E , S O F T WA R E TEAMS & REQUIREMENTS GRADING 44 Grading Grading a “team” course is always hard: § Within each team, did X do more work than Y? Was X more instrumental to the success of, or more responsible for the failure of, than Y? § Among teams: did Team 1 do better than Team 5? Remember we do have numerical scores for this part! Grading will be a combination of: § Your team’s performance in “assignments” § Your team’s performance in project reviews § Your team’s performance in final competition Grading • Although the class is arranged into teams, each student will be graded individually for his/her contributions • Every problem set solution will be co-written by all team members. Each team member that has contributed to a particular section will be identified • Final team project writeup will be co-written by all team members. Each team member that has contributed to a particular section will be identified • Instructors will observe, throughout the quarter, the contributions of all team members • Bonus exercise: at the end of the quarter each of you will have a chance to “grade” everyone else in your team…anonymously. 46 Some Help… Sign up for Stanford AA’s very own UAV club for help with flying R/C and others goodies SUAVE: see http://uav.stanford.edu/about Thanks a lot for your attention! See you on Wednesday if you have the right stuff! Questions & Answers More details at http://adl.stanford.edu/groups/aa241x











© Copyright 2025