
Monetary welfare measurement 1 Hicks’s Compensating and Equivalent Variations KC Border
CALIFORNIA INSTITUTE OF TECHNOLOGY
Division of the Humanities and Social Sciences
Monetary welfare measurement
KC Border
Fall 2008
Revised Fall 2014
v. 2014.11.07::16.20
1
Hicks’s Compensating and Equivalent Variations
Hicks [6, 7] assigns monetary values to budget changes. He defines the Compensating Variation
to be “the loss of income which would just offset a fall in price, leaving the consumer no better
off than before.” That is, starting from a budget (p0 , w), considering a price change to the new
budget (p1 , w) he defines CV(p0 , p1 ) by
v(p1 , w − CV) = v(p0 , w),
where v is the indirect utility function. In terms of the expenditure function, letting υ0 = v(p0 , w)
and υ1 = v(p1 , w), we have w − CV = e(p1 , υ0 ) and w = e(p1 , υ1 ), so
CV(p0 , p1 ) = e(p1 , υ1 ) − e(p1 , υ0 ).
Similarly he defines the Equivalent Variation as the compensating variation for the reverse
change by
EV(p0 , p1 ) = e(p0 , υ1 ) − e(p0 , υ0 ).
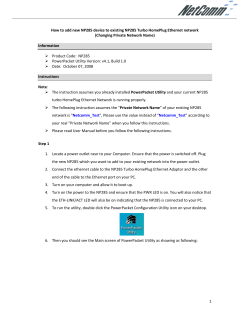
See Figure 1 for the case where the price of y is held fixed and and the price of x decreases. I
hope it is apparent from the figure that the compensating and equivalent variations need not be
equal.
2
The quasi-linear case
A utility function u(x1 , . . . , xn , y) is quasi-linear if it is of the form
u(x1 , . . . , xn , y) = y + f (x1 , . . . , xn ),
where f is concave. The indifference curves of a quasi-linear function are vertical shifts of one
another, and so typically intersect the x-axis, so corner solutions with y = 0 are common. For
interior points though, any additional income is spent on good y. In this case the CV and EV
are just vertical shifts of each other and so are equal—see Figure ??. But if corner solutions are
involved, this is no longer true—see Figure 3 for a particularly nasty example.
3
Money metric utility
A more general approach to assigning monetary values to budgets is taken by Chipman and
Moore [1, 2], who adapt ideas from McKenzie [12] and Hurwicz and Uzawa [8]. Define
(
)
µ(p∗ ; p, w) = e p∗ , v(p, w) ,
(⋆)
1
KC Border
Monetary welfare measurement
2
y
e(p0 , υ1
)
EV(p0 , p1 )
w{
CV(p0 , p1 )
x
ˆ(p0 , υ1 )
1
e(p , υ0 )
x∗ (p0 , w)
x∗ (p1 , w)
x
ˆ(p1 , υ0 )
(p0 , w)
(p1 , w)
x
Figure 1. Compensating and equivalent variation. (The figure is drawn to scale for the case
u(x, y) = x1/3 y 2/3 , w = 1, p0x = 1, p1x = 1/2, p0y = p1y = 1.)
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
y
e(p0 , υ1
)
EV(p0 , p1 )
w
CV(p0 , p1 )
1
e(p , υ0 )
3
x
ˆ(p0 , υ1 )
x∗ (p0 , w)
x∗ (p1 , w)
x
ˆ(p1 , υ0 )
(p0 , w)
(p1 , w)
x
Figure 2. A nice quasi-linear case where CV = EV. (Here u(x, y) = y + (1/3) ln x, w = 1,
p0x = 1, p1x = 1/2, p0y = p1y = 1.)
where p∗ is an arbitrary price vector. Since e is strictly increasing in v, this is an indirect
utility or welfare measure. That is,
v(p, w) ⩾ v(p′ , w′ )
if and only if µ(p∗ ; p, w) ⩾ µ(p∗ ; p′ , w′ ),
but the units of µ are in dollars (or euros, or whatever). The money values depend on the choice
of p∗ . This function is variously called a money metric (indirect) utility or an incomecompensation function.1
4
Compensating and equivalent variation in terms of money
metrics
Thus we may define the compensating and equivalent variations of arbitrary budget changes by
CV(p0 , w0 ; p1 , w1 ) = e(p1 , υ1 ) − e(p1 , υ0 ) = µ(p1 ; p1 , w1 ) − µ(p1 ; p0 , w0 )
(1)
EV(p , w ; p , w ) = e(p , υ1 ) − e(p , υ0 ) = µ(p ; p , w ) − µ(p ; p , w ).
(2)
0
1 In
0
terms of preferences,
1
1
0
0
0
1
1
0
0
0
µ(p; p0 , w0 ) = inf{p · x : x ≽ x∗ (p0 , w0 )}.
Lionel McKenzie [12] employs a similar construction to replace the expenditure function in a framework where
only preferences were used, not a utility index. He defines a slightly different function µ(p; x0 ) = inf{p·x : x ≽ x0 }.
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
4
y
e(p , υ1
)
0 1
EV(p , p )
w
0 1
CV(p , p )
0
e(p1 , υ0 )
x
ˆ(p0 , υ1 )
(p0 , w)
(p1 , w)
x∗ (p0 , w) = x
ˆ(p1 , υ0 )
x∗ (p1 , w)
Figure 3. A nasty quasi-linear case where CV ̸= EV. (Here u(x, y) = y + 0.6 ln x, w = 0.4,
p0x = 1, p1x = 1/2, p0y = p1y = 1. It may not look like it, but the red indifference curve is a vertical
shift of the blue one.)
v. 2014.11.07::16.20
x
KC Border
5
Monetary welfare measurement
5
A single price change
Now consider a decrease in the price of only good i. That is,
p1i < p0i ,
p1j = p0j = p¯j for j ̸= i
and
w0 = w1 = w.
¯
Since the price of good i decreases, the new budget set includes the old one, so welfare will not
decrease. To make the analysis non-vacuous, let us assume that x∗i (p1 , w)
¯ > 0.
By definition,
CV(p0 , p1 ) = µ(p1 ; p1 , w1 ) −µ(p1 ; p0 , w0 )
{z
}
|
w
¯
EV(p0 , p1 ) = µ(p0 ; p1 , w1 ) − µ(p0 ; p0 , w0 )
{z
}
|
w
¯
We now use the following trick (which applies whenever w0 = w1 = w):
¯
µ(p0 ; p0 , w0 ) = w0 = w
¯ = w1 = µ(p1 ; p1 , w1 ).
This enables us to rewrite the values as
CV = µ(p0 ; p0 , w0 ) −µ(p1 ; p0 , w0 )
|
{z
}
w
¯
EV = µ(p0 ; p1 , w1 ) − µ(p1 ; p1 , w1 )
{z
}
|
w
¯
Or in terms of the expenditure function, we have:
CV = e(p0 , υ0 ) − e(p1 , υ0 ).
EV = e(p0 , υ1 ) − e(p1 , υ1 )
Compare these expression to the definitions (2) and (1). In terms of the expenditure function,
definition (2) is equivalent to EV(p0 , w0 ; p1 , w1 ) = e(p0 , υ1 ) − e(p0 , υ0 ), which by the trick is
equal to e(p0 , υ1 ) − e(p1 , υ1 ). In my opinion, using the trick obscures the true comparison, which
is of the budgets (p0 , w0 ) and (p1 , w1 ) using the money metric defined by p0 . So why did Hicks
rewrite things this way? So he could use the Fundamental Theorem of Calculus and the fact
that ∂e/∂pi = x
ˆi to get
∫
EV(p0 , p1 ) = e(p0 , υ1 ) − e(p1 , υ1 ) =
p1i
∫
CV(p0 , p1 ) = e(p0 , υ0 ) − e(p1 , υ0 ) =
p0i
x
ˆi (p, p¯−i , υ1 ) dp
(2′ )
x
ˆi (p, p¯−i , υ0 ) dp,
(1′ )
p0i
p1i
where the notation p, p¯−i refers to the price vector (¯
p1 , . . . , p¯i−1 , p, p¯i+1 , . . . , p¯n ).
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
6
That is, for a change in the price of good i, the equivalent and the
compensating variation are the areas under the Hicksian compensated demand curves for good i corresponding to utility levels υ1
and υ0 respectively.
Also since p0i > p1i , the integrals above are positive if x
ˆi is positive.
Assume now that good i is not inferior, that is, assume
∂x∗i
>0
∂w
for all (p, w). Recall the Slutsky equation,
(
)
∂x
ˆi p, v(p, w)
∂x∗ (p, w)
∂x∗i (p, w)
=
+ x∗j (p, w) i
.
∂pj
∂pj
∂w
(S)
Under the assumption that good i is normal and that x∗j > 0, this implies that
(
)
∂x
ˆi p, v(p, w)
∂x∗i (p, w)
>
.
∂pj
∂pj
We know that the Hicksian compensated demands for good i are downward-sloping as a function
of pi (other prices held constant), that is, ∂ x
ˆi /∂pi < 0, so we have for j = i
(
)
∂x
ˆi p, v(p, w)
∂x∗i (p, w)
0>
>
.
(3)
∂pi
∂pi
Now by the equivalence of expenditure minimization and utility maximization we know that
x∗ (p1 , w)
¯ =x
ˆ(p1 , υ1 )
and x∗ (p0 , w)
¯ =x
ˆ(p0 , υ0 ).
(4)
Then (3) tells us that
0>
∂x
ˆi (p1 , υ1 )
∂x∗i (p1 , w)
¯
>
∂pi
∂pi
and
0>
∂x
ˆi (p0 , υ0 )
∂x∗i (p0 , w)
¯
>
∂pi
∂pi
That is, as a function of pi . the ordinary demand x∗i is steeper (more negatively sloped) than the
Hicksian demand x
ˆi , where it crosses the Hicksian demand. Since x∗i is downward sloping and
0
1
pi < pi it must be the case that the Hicksian demand x
ˆi (·, υ1 ) lies above the Hicksian demand
x
ˆi (·, υ0 ). See Figure 4. Thus, for a price decrease, if good i is not inferior, then
EV > CS > CV > 0.
The inequalities are reversed for a price increase. Also note that if
demand curves coincide.
6
∂x∗
i
∂w
= 0, then the three
“Deadweight loss”
Consider a simple problem where the good 1 is subjected to an ad rem tax of t per unit, but
income and other prices remain unchanged. The original price vector is p0 and the new one is
p1 = p0 + te1 (where e1 is the first unit coordinate vector (1, . . . , 0)). Clearly the consumer is
worse off under the price vector p1 . But how much worse off?
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
7
xi
x∗i (pi ; p¯−i , w)
¯
CS
EV
x
ˆi (pi ; p¯−i , υ1 )
CV
p1i
x
ˆi (pi ; p¯−i , υ0 )
p0i
pi
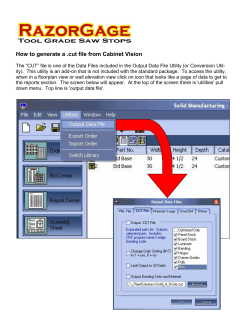
Figure 4. Illustration of a single price change. (Graphs are for a Cobb–Douglas utility.)
N.B. The horizontal axis is the price axis and the vertical axis is quantity axis.
The equivalent variation is the area under the Hicksian demand curve for utility level υ0 .
The compensating variation is the area under the Hicksian demand curve for utility level υ1 .
The consumer’s surplus is the area under the ordinary demand curve.
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
8
We shall compare the tax revenue
T = tx∗1 (p1 , w)
(5)
to the welfare cost measured by the money metric utility. Specifically, we shall compare tax
revenue to the equivalent variation of the price change (which is negative, since the consumer is
worse off). We shall show that
− EV −T > 0.
This excess of the welfare loss over the tax revenue is referred to as the deadweight loss2 from
ad rem taxation.
Write
∫ p01 +t
− EV −T =
x
ˆ1 (p, p0−1 , υ1 ) dp − T
by (2′ )
p01
∫
p01 +t
=
p01
∫
p01 +t
=
p01
∫
p01 +t
=
p01
x
ˆ1 (p, p0−1 , υ1 ) dp − tx∗1 (p1 , w)
by (5)
x
ˆ1 (p, p0−1 , υ1 ) dp − tˆ
x1 (p1 , υ1 )
∫
x
ˆ1 (p, p0−1 , υ1 ) dp
−
p01 +t
x
ˆ1 (p1 , υ1 ) dp.
p01
The last equality come from integrating the constant x
ˆ1 (p01 + t, p0−1 , υ1 ) over an interval of
length t. But Hicksian compensated demands are downward sloping, so for p01 ⩽ p ⩽ p11 = p01 + t,
we have
x
ˆ1 (p, p0−1 , υ1 ) = x
ˆ1 (p, p02 , . . . , p0n , υ1 ) > x
ˆ1 (p01 + t, p02 , . . . , p0n , υ1 ) = x
ˆ1 (p11 , p12 , . . . , p1n , υ1 ),
so the last expression is > 0.
Therefore a lump-sum tax leaves the consumer better off than an
ad rem tax that raises the same revenue.
The amazing thing is not so much that the ad rem tax is inferior
to the lump-sum tax, but that some taxes are worse than others at
all, even when they collect the same amount of revenue! This would
not be apparent without our theoretical apparatus.
7
Revealed preference and lump-sum taxation
Recall that x is revealed preferred to y if there is some budget containing both x and y and
x is chosen. If the choice function is generated by utility maximization, then if x is revealed
preferred to y, we must have u(x) ⩾ u(y).
2 I don’t know why the term “deadweight” is used. Musgrave [13] uses the term “excess burden” in 1959,
which dates back at least to Joseph [9] in 1939, who claims the concept was known to Marshall [10, 8th edition]
in 1890. Harberger [5] uses the term “deadweight loss” in 1964, and claims the analysis of the concept goes back
at least to Dupuit [4] in 1844.
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
9
So consider an ad rem tax t on good 1 versus a lump-sum tax, as above. Assume both taxes
raise the same revenue T . The ad rem tax leads to the budget (p1 , w), and the lump-sum to the
budget (p0 , w − T ), where
p11 = p01 + t and p1j = p0j , j = 2, . . . , n.
Let x1 be demanded under the ad rem tax and x0 be demanded under the lump-sum tax. Then
x0 is revealed preferred to x1 :
w ⩾ p1 · x1 = p0 · x1 + tx11 = p0 · x1 + T,
so
p0 · x1 ⩽ w − T,
which says that x1 is in the budget (p0 , w − T ), from which x0 is chosen. Thus
u(x0 ) ⩾ u(x1 ),
so the lump-sum tax is at least as good as the ad rem tax.
This argument is a lot simpler than the argument above, but we don’t get a dollar value
of the difference. Of course the previous argument gave us two or three different dollar values,
depending on how we chose p∗ for the money metric.
8
Money metrics and recovering utility from demand: A
little motivation
It is possible to solve differential equations to recover a utility function from a demand function.
The general approach may be found in Samuelson [14, 15], but the following discussion is based
on Hurwicz and Uzawa [8].
Consider the demand function
x∗ : Rn++ × R++ → Rn+
derived by maximizing a locally nonsatiated utility function u. Let v be the indirect utility,
that is,
(
)
v(p, w) = u x∗ (p, w) .
Since u is locally nonsatiated, the indirect utility function v is strictly increasing in w. The
Hicksian expenditure function e is defined by
e(p, υ) = min{p · x : u(x) ⩾ υ}.
and the income compensation function µ is defined by
(
)
µ(p; p0 , w0 ) = e p, v(p0 , w0 ) ,
Set υ 0 = v(p0 , w0 ). From the Envelope Theorem we know that
(
)
∂e(p, υ 0 )
=x
ˆi (p, υ 0 ) = x∗i p, e(p, υ 0 ) .
∂pi
Suppressing υ0 , this becomes a total differential equation
(
)
e′ (p) = x∗ p, e(p) .
What does it mean to solve such an equation, and what happened to υ 0 ?
v. 2014.11.07::16.20
(6)
KC Border
Monetary welfare measurement
10
An aside on solutions of differential equations
You may recall from your calculus classes that, in general, differential equations have many
solutions, often indexed by “constants of integration.” For instance, take the simplest
differential equation,
y′ = a
for some constant a. The general form of the solution is
y(x) = ax + C,
where C is an arbitrary constant of integration. What this means is that the differential
equation y ′ = a has infinitely many solutions, one for each value of C. The parameter υ in
our problem can be likened to a constant of integration.
You should also recall that we rarely specify C directly as a condition of the problem,
since we don’t know the function y in advance. Instead we usually specify an initial
condition (x0 , y 0 ). That is, we specify that
y(x0 ) = y 0 .
In this simple case, the way to translate an initial condition into a constant of integration
is to solve the equation
y 0 = ax0 + C =⇒ C = y 0 − ax0 ,
and rewrite the solution as
y(x) = ax + (y 0 − ax0 ) = y 0 + a(x − x0 ).
In order to make it really explicit that the solution depends on the initial conditions,
differential equations texts may go so far as to write the solution as
y(x; x0 , y 0 ) = y 0 + a(x − x0 ).
In our differential equation (6), an initial condition corresponding to the “constant of integration”
υ is a pair (p0 , w0 ) satisfying
e(p0 , υ) = w0 .
From the equivalence of expenditure minimization an utility maximization under a budget constraint, this gives us the relation
(
)
υ = v(p0 , w0 ) = u x∗ (p0 , w0 ) .
Following Hurwicz and Uzawa [8], define the income compensation function in terms of
the Hicksian expenditure function e via
(
)
µ(p; p0 , w0 ) = e p, v(p0 , w0 ) .
Observe that
µ(p0 ; p0 , w0 ) = w0
and
(
)
(
)
∂µ(p; p0 , w0 )
∂e(p, υ 0 )
=
=x
ˆi (p, υ 0 ) = x∗i p, e(p, υ 0 ) = x∗i p, µ(p; p0 , w0 ) .
∂pi
∂pi
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
11
In other words, the function e defined by
e(p) = µ(p; p0 , w0 )
solves the differential equation
(
)
e′ (p) = x∗ p, e(p) .
subject to the initial condition
e(p0 ) = w0 .
We are now going to turn the income compensation function around and treat (p0 , w0 ) as the
variable of interest. Fix a price, any price, p∗ ∈ Rn++ and define the function vˆ : Rn++ ×R++ → R
by
(
)
vˆ(p, w) = µ(p∗ ; p, w) = e p∗ , v(p, w) .
The function vˆ is another indirect utility. That is,
vˆ(p, w) ⩾ vˆ(p′ , w′ ) ⇐⇒ v(p, w) ⩾ v(p′ , w′ ).
We can use w to find a utility U , at least on the range of x∗ by
U (x) = µ(p∗ ; p, w)
9
where x = x∗ (p, w).
Recovering utility from demand: The plan
The discussion above leads us to the following approach. Given a demand function x∗ :
1. Somehow solve the differential equation
(
)
∂µ(p)
= x∗i p, µ(p) .
∂pi
Write the solution explicitly in terms of the intial condition µ(p0 ) = w0 as µ(p; p0 , w0 ).
2. Use the function µ to define an indirect utility function vˆ by
vˆ(p, w) = µ(p∗ ; p, w).
3. Invert the demand function to give (p, w) as a function of x∗ .
4. Define the utility on the range of x∗ by
U (x) = µ(p∗ ; p, w)
where x = x∗ (p, w).
This is easier said than done, and there remain a few questions. For instance, how do we know
that the differential equation has a solution? If a solution exists, how do we know that the
“utility” U so derived generates the demand function x∗ ? We shall address these questions
presently, but I find it helps to look at some examples first.
v. 2014.11.07::16.20
KC Border
10
Monetary welfare measurement
12
Examples
In order to draw pictures, I will consider two goods x and y. By homogeneity of x∗ , I may take
good y as numéraire and fix py = 1, so the price of x will simply be denoted p.
10.1
Deriving the income compensation function from a utility
For the Cobb–Douglas utility function
u(x, y) = xα y β
where α + β = 1, the demand functions are
x∗ (p, w) =
The indirect utility is thus
αw
,
p
y ∗ (p, w) = βw.
( )α
α
v(p, w) = wβ
.
p
β
The expenditure function is
e(p, υ) = υβ −β
( p )α
α
.
Now pick (p0 , w0 ) and define
(
)
µ(p; p0 , w0 ) = e p; v(p0 , w0 )
(
( )α )
( )α
α
0 β
−β p
= w β
β
p0
α
( )α
p
= w0
.
p0
Evaluating this at p = p0 we have
µ(p0 ; p0 , w0 ) = w0 .
That is, the point (p0 , w0 ) lies on the graph of µ(·; p0 , w0 ). Figure 5 shows the graph of this
function for different values of (p0 , w0 ). For each fixed (p0 , w0 ), the function µ(p) = µ(p; p0 , w0 )
satisfies the (ordinary) differential equation
[
]
(
)
dµ
αµ(p)
= α w0 (p0 )−α pα−1 =
= x∗ p, µ(p) .
dp
p
Note that homogeneity and budget exhaustion have allowed us to reduce the dimensionality
by 1. We have n − 1 prices,
as we have chosen a numéraire, and the demand for the nth good
∑n−1
∗
is gotten from xn = w − i=1 pi x∗i .
10.2
Examples of recovering utility from demand
Let n = 2, and set p2 = 1, so that there is effectively only one price p, and only one differential
equation (for x1 )
(
)
µ′ (p) = x p, µ(p) .
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
13
µ, w
3
2
1
p
1
2
3
4
Figure 5. Graph of µ(p; p0 ; w0 ) for Cobb–Douglas α = 2/5 utility and various values of (p0 , w0 ).
1 Example In this example
x(p, w) =
αw
.
p
(This x is the demand for x1 . From the budget constraint we can infer x2 = (1 − α)w.)
The corresponding differential equation is
µ′ =
αµ
p
or
µ′
α
= .
µ
p
(For those of you more comfortable with y-x notation, this is y ′ = αy/x.) Integrate both sides
of the second form to get
ln µ = α ln p + C
so exponentiating each side gives
µ(p) = Kpα
where K = exp(C) is a constant of integration. Given the initial condition (p0 , w0 ), we must
have
w0
w0 = K(p0 )α ,
so K = 0 α ,
(p )
or
w0
µ(p; p0 , w0 ) = 0 α pα .
(p )
∗
For convenience set p = 1, to get
w
vˆ(p, w) = µ(p∗ ; p, w) = α .
p
To recover the utility u, we need to invert the demand function, that is, we need to know for
what budget (p, w) is (x1 , x2 ) chosen. The demand function is
x1 =
αw
,
p
x2 = (1 − α)w,
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
so solving for w and p, we have
x2
1−α
w=
x1 =
x2
α 1−α
=⇒
p
14
p=
α x2
.
1 − α x1
Thus
u(x1 , x2 ) =
vˆ(p, w)
(
)
α x2 x2
= vˆ
,
1 − α x1 1 − α
=
(
(
x2
1−α
α x2
1−α x1
=
x2
1−α
)α
)1−α (
x1 )α
α
1−α
= cxα
,
1 x2
where c = (1 − α)1−α αα , which is a Cobb–Douglas utility.
□
2 Example In this example we find a utility that generates a linear demand for x. That is,
x(p, w) = β − αp.
(Note the lack of w.) The differential equation is
µ′ = β − αp.
This differential equation is easy to solve:
µ(p) = βp −
α 2
p +C
2
2
For initial condition (p0 , w0 ) we must choose C = w0 − βp0 + α2 p0 , so the solution becomes
α
α 2
µ(p; p0 , w0 ) = βp − p2 + w0 − βp0 + p0 .
2
2
So choosing p∗ = 0 (not really allowed, but it works in this case), we have
α
vˆ(p, w) = µ(p∗ ; p, w) = w − βp + p2 .
2
Given (x, y) (let’s use this rather than (x1 , x2 )), we need to find the (p, w) at which it is
chosen. We know
x = β − αp, y = w − px = w − βp + αp2 ,
so
β−x
p=
,
α
Therefore
β−x
w = y + βp − αp = y + β
−α
α
2
(
β−x
α
)2
.
(
)2 )
β−x
β−x
β−x
,y + β
−α
= w
α
α
α
(
)2
(
)2
β−x
β−x
β−x α β−x
= y+β
−α
+
−β
α
α
α } 2
α
| {z
|
| {z }
{z
}
(
u(x, y) = vˆ(p, w)
w
= y−
(β − x)
.
2α
2
v. 2014.11.07::16.20
p
p2
KC Border
Monetary welfare measurement
15
Note that the utility is decreasing in x for x > β. Representative indifference curves are shown
in Figure 6. The demand curve specified implies that x and y will be negative for some values
of p and w, so we can’t expect that this is a complete specification. I’ll leave it to you to figure
out when this makes sense.
□
5
4
3
2
1
1
2
3
4
5
6
7
8
9
10 11 12
Figure 6. Indifference curves for Example 2 (linear demand) with β = 10, α = 5.
11
A general integrability theorem
Hurwicz and Uzawa [8] prove the following theorem, presented here without proof.
3 Hurwicz–Uzawa Integrability Theorem Let ξ : Rn++ × R+ → Rn+ . Assume
(B) The budget exhaustion condition
p · ξ(p, w) = w
is satisfied for every (p, w) ∈
Rn++
× R+ .
(D) Each component function ξi is differentiable everywhere on Rn++ × R+ .
(S) The Slutsky matrix is symmetric, that is, for every (p, w) ∈ Rn++ × R+ ,
Si,j (p, w) = Sj,i (p, w)
i, j = 1, . . . , n.
(NSD) The Slutsky matrix is negative semidefinite, that is, for every (p, w) ∈ Rn++ × R+ , and
every v ∈ Rn ,
n ∑
n
∑
Si,j (p, w)vi vj ⩽ 0.
i=1 j=1
(IB) The function ξ satisfies the following boundedness condition on the partial derivative with
respect to income. For every 0 ≪ a ≪ a
¯ ∈ Rn++ , there exists a (finite) real number Ma,¯a
such that for all w ⩾ 0
∂ξi (p, w) a≦p≦a
¯
=⇒
∂w ⩽ Ma,¯a i = 1, . . . , n.
Let X denote the range of ξ,
X = {ξ(p, w) ∈ Rn+ : (p, w) ∈ Rn++ × R+ }.
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
16
Then there exists an upper semicontinuous monotonic utility function u : X → R on the range
X such that for each (p, w) ∈ Rn++ × R+ ,
ξ(p, w) is the unique maximizer of u over the budget set {x ∈ X : p · x ⩽ w}.
Moreover u has the following property (which reduces to strict quasiconcavity if X is itself
convex): For each x ∈ X, there exists a p ∈ Rn++ such that if y ̸= x and u(y) ⩾ u(x),
then p · y > p · x.
I have more extensive notes on this topic, including most of a sketch of the proof here.
References
[1] J. S. Chipman and J. C. Moore. 1980. Compensating variation, consumer’s surplus, and
welfare. American Economic Review 70(5):933–949.
http://www.jstor.org/stable/1805773
[2]
. 1990. Acceptable indicators of welfare change, consumer’s surplus analysis, and
the Gorman polar form. In J. S. Chipman, D. L. McFadden, and M. K. Richter, eds.,
Preferences, Uncertainty, and Optimality: Essays in Honor of Leonid Hurwicz, pages 1–77.
Boulder, Colorado: Westview Press.
[3] P. A. Diamond and D. L. McFadden. 1974. Some uses of the expenditure function in public
finance. Journal of Public Economics 3:3–21.
[4] J. E. J. Dupuit. 1844. De la l’utilité and de sa mesure. Collezione di scritti inediti o rari di
economisti. Turin: La Riforma Soziale. Collected and reprinted by Mario di Bernardi and
Luigi Einaudi, La Riforma Soziale, Turin, 1932.
[5] A. C. Harberger. 1964. The measurement of waste. American Economic Review 54:58–
76.
http://www.jstor.org/stable/1818490
[6] J. R. Hicks. 1936. Value and capital. Oxford, England: Oxford University Press.
[7]
. 1942. Consumers’ surplus and index-numbers. Review of Economic Studies
9(2):126–137.
http://www.jstor.org/stable/2967665
[8] L. Hurwicz and H. Uzawa. 1971. On the integrability of demand functions. In J. S.
Chipman, L. Hurwicz, M. K. Richter, and H. F. Sonnenschein, eds., Preferences, Utility,
and Demand: A Minnesota Symposium, chapter 6, pages 114–148. New York: Harcourt,
Brace, Jovanovich.
[9] M. F. W. Joseph. 1939. The excess burden of indirect taxation. Review of Economic Studies
6(3):226–231.
http://www.jstor.org/stable/2967649.pdf
[10] A. Marshall. 1890. Principles of economics. London.
[11] A. Mas-Colell, M. D. Whinston, and J. R. Green. 1995. Microeconomic theory. Oxford:
Oxford University Press.
[12] L. W. McKenzie. 1957. Demand theory without a utility index. Review of Economic Studies
http://www.jstor.org/stable/2296067
24(3):185–189.
[13] R. A. Musgrave. 1959. The theory of public finance. New York: McGraw–Hill.
v. 2014.11.07::16.20
KC Border
Monetary welfare measurement
17
[14] P. A. Samuelson. 1947. Foundations of economic analysis. Cambridge, Mass.: Harvard
University Press.
[15]
385.
. 1950. The problem of integrability in utility theory. Economica N.S. 17(68):355–
http://www.jstor.org/stable/2549499
[16] H. R. Varian. 1992. Microeconomic analysis, 3d. ed. New York: W. W. Norton & Co.
[17] J. A. Weymark. 1985. Money-metric utility functions. International Economic Review
26(1):219–232.
http://www.jstor.org/stable/2526537
v. 2014.11.07::16.20









© Copyright 2025